标签:lin 背景 ret pass 一个 像素 填充 ini rem
CNN的设计初衷是为了使得模型具有微小平移、旋转不变性,而实际上本文通过实验验证了现在比较流行的神经网络都已经丧失了这样的能力,甚至图像只水平移动一个像素,预测的结果都将会发生很大的变化。之所以如此,作者认为CNN的下采样背离了隆奎斯特采样定理,就连augmentation也并不能缓解微小变化不变性的丧失。
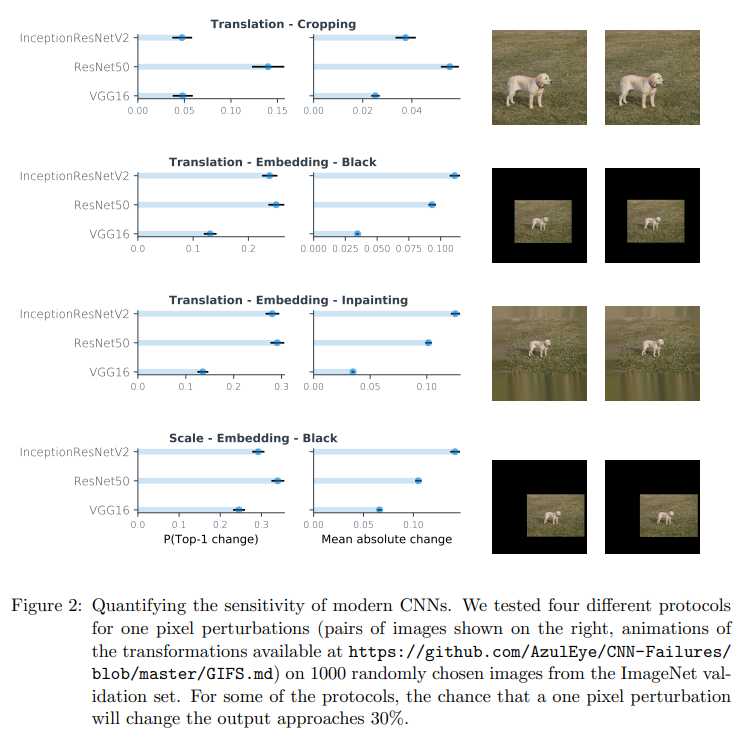
结果如图,对人而言是看不出来什么区别的,但是网络的预测结果却明显不同。
仅仅这么一个微小变化,使得网络的输出发生这么大的变化,这显然是很不合理的,因此作者认为有下面的解释。
作者认为之所以CNN丧失了平移不变性是因为现在CNN的设计忽略了采样定理,也就是奈奎斯特采样定理。作者认为,CNN中的下采样操作,如stride 2 conv和pooling,由于采样频率没满足大于等于两倍的最高频,所以会导致微小形变不变性的丧失。
如何理解?
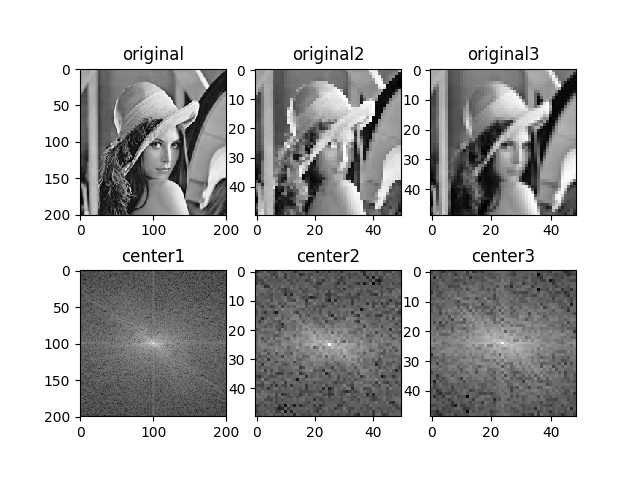
上图我做了三个实验,分别是原图、pooling后的图、conv2d(stride=4)后的图,下面是对应的频谱图。可以看出来,pooling、conv下采样层都是保留高频部分,丢弃低频部分。
可见,pooling层和conv层所做的下采样都是保留高频,丢弃低频成分。因此信号的频率都是高频,而采样频率是和stride相关的,可以理解为每隔多少像素采样一次,因此如果stride太大,采样频率就会过小,这样就不满足采样定理了。
import cv2
import numpy as np
import matplotlib.pyplot as plt
import skimage.measure
import torch
import torch.nn as nn
import torch.nn.functional as F
class FFT(object):
def __init__(self):
pass
def __call__(self,x):
f = np.fft.fft2(x)
fshift = np.fft.fftshift(f)
s1 = np.log(np.abs(fshift))
return s1
@staticmethod
def pooling(feature_map,kernel_size= 2):
inpt = torch.tensor(feature_map[np.newaxis,np.newaxis,:,:],dtype = torch.float32)
out = F.max_pool2d(inpt,kernel_size = kernel_size)
return out.numpy()[0,0,:,:]
#return skimage.measure.block_reduce(feature_map, (kernel_size,kernel_size), np.max)
@staticmethod
def conv2d(feature_map,kernel_size= 2,stride = 1):
inpt = torch.tensor(feature_map[np.newaxis,np.newaxis,:,:],dtype = torch.float32)
kernel = torch.ones((1,1,kernel_size,kernel_size)) / kernel_size
out = F.conv2d(inpt,weight = kernel,stride = stride)
return out.numpy()[0,0,:,:]
if __name__ == "__main__":
fft = FFT()
img = cv2.imread('/home/xueaoru/图片/test002.jpg', 0)
img2 = fft.pooling(img,4)
img3 = fft.conv2d(img,kernel_size = 5,stride = 4)
s1 = fft(img)
s2 = fft(img2)
s3 = fft(img3)
plt.subplot(231)
plt.imshow(img, 'gray')
plt.title('original')
plt.subplot(232)
plt.imshow(img2, 'gray')
plt.title('original2')
plt.subplot(233)
plt.imshow(img3, 'gray')
plt.title('original3')
plt.subplot(234)
plt.imshow(s1,'gray')
plt.title('center1')
plt.subplot(235)
plt.imshow(s2,'gray')
plt.title('center2')
plt.subplot(236)
plt.imshow(s3,'gray')
plt.title('center3')
plt.show()
此外,作者还说明了一件事:
网络越深,微小形变不变性丧失的越严重。上图可以看出vgg16比较浅,还看不出什么变化,但是resnet50已经丧失很多了,densenet201也是一样。
我们训练之前一般会做很多image augmentation的,但是呢,为什么image augmentation也没能缓解平移不变性的丧失呢?
一个简单的回答就是网络学习到一种简单的判别函数,使得网络对训练集的图片的变换具有微小形变不变性,而对于测试集或者说没见过的数据的微小形变不具有不变性。这称为dataset bias。
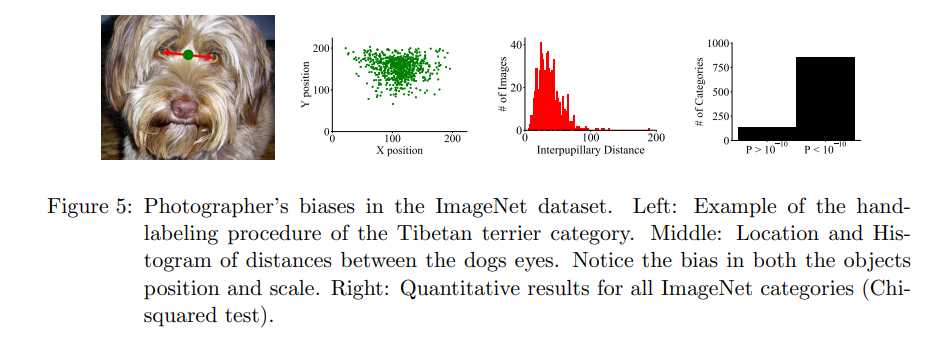
上图是imagenet上训练集里狗的眼睛距离的统计结果,也就是说,一般情况下狗的眼睛肯定在这个range内,网络可以work,然是测试数据的眼睛距离如果不在这个range内的话,网络也许就不work了,因此要求网络学习到这个range之外的数据是很难的,虽然image augmentation有所帮助,但其实很难泛化到所有情况,特别是测试集和训练集不是同一分布的时候。
[论文理解] Why do deep convolutional networks generalize so poorly to small image transformations?
标签:lin 背景 ret pass 一个 像素 填充 ini rem
原文地址:https://www.cnblogs.com/aoru45/p/12222788.html