标签:内存 tmp argc 状态 充电 hold crash zed 重要
copy from:http://gityuan.com/2016/02/05/android-init/
基于Android 6.0的源码剖析, 分析Android启动过程进程号为1的init进程的工作内容
system/core/init/
- init.cpp
- init_parser.cpp
- signal_handler.cpp
init进程是Linux系统中用户空间的第一个进程,进程号固定为1。Kernel启动后,在用户空间启动init进程,并调用init中的main()方法执行init进程的职责。对于init进程的功能分为4部分:
接下来从main()方法说起。
[-> init.cpp]
static int epoll_fd = -1;
int main(int argc, char** argv) {
...
//设置文件属性0777
umask(0);
//初始化内核log,位于节点/dev/kmsg【见小节1.2】
klog_init();
//设置输出的log级别
klog_set_level(KLOG_NOTICE_LEVEL);
//创建一块共享的内存空间,用于属性服务【见小节5.1】
property_init();
//初始化epoll功能
epoll_fd = epoll_create1(EPOLL_CLOEXEC);
//初始化子进程退出的信号处理函数,并调用epoll_ctl设置signal fd可读的回调函数【见小节2.1】
signal_handler_init();
//加载default.prop文件
property_load_boot_defaults();
//启动属性服务器,此处会调用epoll_ctl设置property fd可读的回调函数【见小节5.2】
start_property_service();
//解析init.rc文件
init_parse_config_file("/init.rc");
//执行rc文件中触发器为on early-init的语句
action_for_each_trigger("early-init", action_add_queue_tail);
//等冷插拔设备初始化完成
queue_builtin_action(wait_for_coldboot_done_action, "wait_for_coldboot_done");
queue_builtin_action(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
//设备组合键的初始化操作,此处会调用epoll_ctl设置keychord fd可读的回调函数
queue_builtin_action(keychord_init_action, "keychord_init");
// 屏幕上显示Android静态Logo 【见小节1.3】
queue_builtin_action(console_init_action, "console_init");
//执行rc文件中触发器为on init的语句
action_for_each_trigger("init", action_add_queue_tail);
queue_builtin_action(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
char bootmode[PROP_VALUE_MAX];
//当处于充电模式,则charger加入执行队列;否则late-init加入队列。
if (property_get("ro.bootmode", bootmode) > 0 && strcmp(bootmode, "charger") == 0)
{
action_for_each_trigger("charger", action_add_queue_tail);
} else {
action_for_each_trigger("late-init", action_add_queue_tail);
}
//触发器为属性是否设置
queue_builtin_action(queue_property_triggers_action, "queue_property_triggers");
while (true) {
if (!waiting_for_exec) {
execute_one_command();
//根据需要重启服务【见小节1.4】
restart_processes();
}
int timeout = -1;
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
if (!action_queue_empty() || cur_action) {
timeout = 0;
}
epoll_event ev;
//循环等待事件发生
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, timeout));
if (nr == -1) {
ERROR("epoll_wait failed: %s\n", strerror(errno));
} else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
}
return 0;
}
init进程执行完成后进入循环等待epoll_wait的状态。
此时android的log系统还没有启动,采用kernel的log系统,打开的设备节点/dev/kmsg, 那么可通过cat /dev/kmsg来获取内核log。
接下来,设置log的输出级别为KLOG_NOTICE_LEVEL(5),当log级别小于5时则会输出到kernel log, 默认值为3.
#define KLOG_ERROR_LEVEL 3
#define KLOG_WARNING_LEVEL 4
#define KLOG_NOTICE_LEVEL 5
#define KLOG_INFO_LEVEL 6
#define KLOG_DEBUG_LEVEL 7
#define KLOG_DEFAULT_LEVEL 3 //默认为3
[-> init.cpp]
static int console_init_action(int nargs, char **args) {
char console[PROP_VALUE_MAX];
if (property_get("ro.boot.console", console) > 0) {
snprintf(console_name, sizeof(console_name), "/dev/%s", console);
}
int fd = open(console_name, O_RDWR | O_CLOEXEC);
if (fd >= 0)
have_console = 1;
close(fd);
fd = open("/dev/tty0", O_WRONLY | O_CLOEXEC);
if (fd >= 0) {
const char *msg;
msg = "\n"
"\n"
"\n"
"\n"
"\n"
"\n"
"\n" // console is 40 cols x 30 lines
"\n"
"\n"
"\n"
"\n"
"\n"
"\n"
"\n"
" A N D R O I D ";
write(fd, msg, strlen(msg));
close(fd);
}
return 0;
}
这便是开机显示的底部带ANDROID字样的画面。
[-> init.cpp]
static void restart_processes() {
process_needs_restart = 0;
service_for_each_flags(SVC_RESTARTING,
restart_service_if_needed);
}
检查service_list中的所有服务,对于带有SVC_RESTARTING标志的服务,则都会调用其相应的restart_service_if_needed。
static void restart_service_if_needed(struct service *svc) {
time_t next_start_time = svc->time_started + 5;
if (next_start_time <= gettime()) {
svc->flags &= (~SVC_RESTARTING);
service_start(svc, NULL);
return;
}
if ((next_start_time < process_needs_restart) ||
(process_needs_restart == 0)) {
process_needs_restart = next_start_time;
}
}
之后再调用service_start来启动服务。
接下来,解读init的main方法中的4大块核心知识点:信号处理、rc文件语法、启动服务以及属性服务。
在小节[1.1]的init.cpp的main()方法中通过signal_handler_init()来初始化信号处理过程。
主要工作:
[-> signal_handler.cpp]
void signal_handler_init() {
int s[2];
// 创建socket pair
if (socketpair(AF_UNIX, SOCK_STREAM | SOCK_NONBLOCK | SOCK_CLOEXEC, 0, s) == -1) {
exit(1);
}
signal_write_fd = s[0];
signal_read_fd = s[1];
//当捕获信号SIGCHLD,则写入signal_write_fd
struct sigaction act;
memset(&act, 0, sizeof(act));
act.sa_handler = SIGCHLD_handler;
//SA_NOCLDSTOP使init进程只有在其子进程终止时才会受到SIGCHLD信号
act.sa_flags = SA_NOCLDSTOP;
sigaction(SIGCHLD, &act, 0);
//进入waitpid来处理子进程是否退出的情况【见小节2.2】
reap_any_outstanding_children();
//调用epoll_ctl方法来注册epoll的回调函数【见小节2.3】
register_epoll_handler(signal_read_fd, handle_signal);
}
每个进程在处理其他进程发送的signal信号时都需要先注册,当进程的运行状态改变或终止时会产生某种signal信号,init进程是所有用户空间进程的父进程,当其子进程终止时产生SIGCHLD信号,init进程调用信号安装函数sigaction(),传递参数给sigaction结构体,便完成信号处理的过程。
这里有两个重要的函数:SIGCHLD_handler和handle_signal,如下:
//写入数据
static void SIGCHLD_handler(int) {
//向signal_write_fd写入1,直到成功为止
if (TEMP_FAILURE_RETRY(write(signal_write_fd, "1", 1)) == -1) {
ERROR("write(signal_write_fd) failed: %s\n", strerror(errno));
}
}
//读取数据
static void handle_signal() {
char buf[32];
//读取signal_read_fd中的数据,并放入buf
read(signal_read_fd, buf, sizeof(buf));
reap_any_outstanding_children(); 【见小节2.2】
}
[-> signal_handler.cpp]
static void reap_any_outstanding_children() {
while (wait_for_one_process()) { }
}
static bool wait_for_one_process() {
int status;
//等待任意子进程,如果子进程没有退出则返回0,否则则返回该子进程pid。
pid_t pid = TEMP_FAILURE_RETRY(waitpid(-1, &status, WNOHANG));
if (pid == 0) {
return false;
} else if (pid == -1) {
return false;
}
//根据pid查找到相应的service
service* svc = service_find_by_pid(pid);
std::string name;
if (!svc) {
return true;
}
//当flags为RESTART,且不是ONESHOT时,先kill进程组内所有的子进程或子线程
if (!(svc->flags & SVC_ONESHOT) || (svc->flags & SVC_RESTART)) {
kill(-pid, SIGKILL);
}
//移除当前服务svc中的所有创建过的socket
for (socketinfo* si = svc->sockets; si; si = si->next) {
char tmp[128];
snprintf(tmp, sizeof(tmp), ANDROID_SOCKET_DIR"/%s", si->name);
unlink(tmp);
}
//当flags为EXEC时,释放相应的服务
if (svc->flags & SVC_EXEC) {
waiting_for_exec = false;
list_remove(&svc->slist);
free(svc->name);
free(svc);
return true;
}
svc->pid = 0;
svc->flags &= (~SVC_RUNNING);
//对于ONESHOT服务,使其进入disabled状态
if ((svc->flags & SVC_ONESHOT) && !(svc->flags & SVC_RESTART)) {
svc->flags |= SVC_DISABLED;
}
//禁用和重置的服务,都不再自动重启
if (svc->flags & (SVC_DISABLED | SVC_RESET)) {
svc->NotifyStateChange("stopped"); //设置相应的service状态为stopped
return true;
}
//服务在4分钟内重启次数超过4次,则重启手机进入recovery模式
time_t now = gettime();
if ((svc->flags & SVC_CRITICAL) && !(svc->flags & SVC_RESTART)) {
if (svc->time_crashed + CRITICAL_CRASH_WINDOW >= now) {
if (++svc->nr_crashed > CRITICAL_CRASH_THRESHOLD) {
android_reboot(ANDROID_RB_RESTART2, 0, "recovery");
return true;
}
} else {
svc->time_crashed = now;
svc->nr_crashed = 1;
}
}
svc->flags &= (~SVC_RESTART);
svc->flags |= SVC_RESTARTING;
//执行当前service中所有onrestart命令
struct listnode* node;
list_for_each(node, &svc->onrestart.commands) {
command* cmd = node_to_item(node, struct command, clist);
cmd->func(cmd->nargs, cmd->args);
}
//设置相应的service状态为restarting
svc->NotifyStateChange("restarting");
return true;
}
另外:通过getprop | grep init.svc 可查看所有的service运行状态。状态总共分为:running, stopped, restarting
[-> signal_handler.cpp]
void register_epoll_handler(int fd, void (*fn)()) {
epoll_event ev;
ev.events = EPOLLIN;
ev.data.ptr = reinterpret_cast<void*>(fn);
//将fd的可读事件加入到epoll_fd的监听队列中
if (epoll_ctl(epoll_fd, EPOLL_CTL_ADD, fd, &ev) == -1) {
ERROR("epoll_ctl failed: %s\n", strerror(errno));
}
}
当fd可读,则会触发调用(*fn)函数。
rc文件语法是以行尾单位,以空格间隔的语法,以#开始代表注释行。rc文件主要包含Action、Service、Command、Options,其中对于Action和Service的名称都是唯一的,对于重复的命名视为无效。
Action: 通过触发器trigger,即以on开头的语句来决定执行相应的service的时机,具体有如下时机:
服务Service,以 service开头,由init进程启动,一般运行在init的一个子进程,所以启动service前需要判断对应的可执行文件是否存在。init生成的子进程,定义在rc文件,其中每一个service在启动时会通过fork方式生成子进程。
例如: service servicemanager /system/bin/servicemanager代表的是服务名为servicemanager,服务执行的路径为/system/bin/servicemanager。
下面列举常用的命令
Options是Service的可选项,与service配合使用
/dev/socket/<name>的socketdefault: 意味着disabled=false,oneshot=false,critical=false。
on early-init
on init
on late-init
trigger post-fs
trigger load_system_props_action
trigger post-fs-data
trigger load_persist_props_action
trigger firmware_mounts_complete
trigger boot
on post-fs //挂载文件系统
start logd
mount rootfs rootfs / ro remount
mount rootfs rootfs / shared rec
mount none /mnt/runtime/default /storage slave bind rec
...
on post-fs-data //挂载data
start logd
start vold //启动vold
...
on boot //启动核心服务
...
class_start core //启动core class
触发器的执行顺序为on early-init -> init -> late-init,从上面的代码可知,在late-init触发器中会触发文件系统挂载以及on boot。再on boot过程会触发启动core class。至于main class的启动是由vold.decrypt的以下4个值的设置所决定的, 该过程位于system/vold/cryptfs.c文件。
on nonencrypted
class_start main
class_start late_start
on property:vold.decrypt=trigger_restart_min_framework
class_start main
on property:vold.decrypt=trigger_restart_framework
class_start main
class_start late_start
on property:vold.decrypt=trigger_reset_main
class_reset main
on property:vold.decrypt=trigger_shutdown_framework
class_reset late_start
class_reset main
在init.zygote.rc文件中,zygote服务定义如下:
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
class main
socket zygote stream 660 root system
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
onrestart restart netd
通过init_parser.cpp完成整个service解析工作,此处就不详细展开讲解析过程,该过程主要工作是:
Zygote服务会随着main class的启动而启动,退出后会由init重启zygote,即使多次重启也不会进入recovery模式。zygote所对应的可执行文件是/system/bin/app_process,通过调用pid =fork()创建子进程,通过execve(svc->args[0], (char**)svc->args, (char**) ENV),进入App_main.cpp的main()函数。故zygote是通过fork和execv共同创建的。
流程如下:
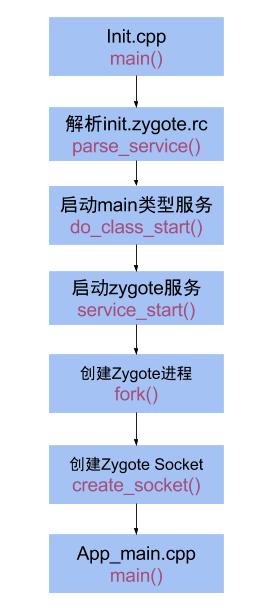
而关于Zygote重启在前面的信号处理过程中讲过,是处理SIGCHLD信号,init进程重启zygote进程,更多关于Zygote内容见Zygote篇。
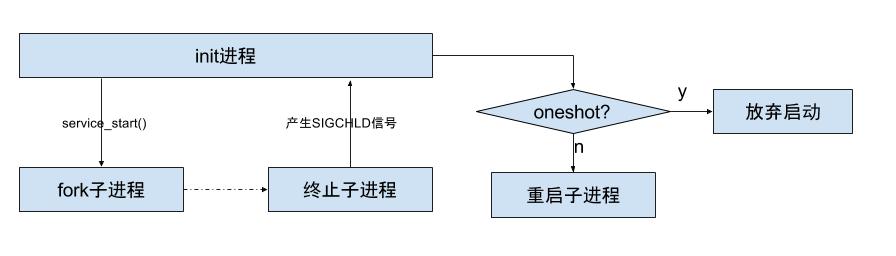
当init子进程退出时,会产生SIGCHLD信号,并发送给init进程,通过socket套接字传递数据,调用到wait_for_one_process()方法,根据是否是oneshot,来决定是重启子进程,还是放弃启动。
所有的Service里面只有servicemanager ,zygote ,surfaceflinger这3个服务有onrestart关键字来触发其他service启动过程。
//zygote可触发media、netd重启
service zygote /system/bin/app_process -Xzygote /system/bin --zygote --start-system-server
class main
socket zygote stream 660 root system
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
onrestart restart netd
//servicemanager可触发healthd、zygote、media、surfaceflinger、drm重启
service servicemanager /system/bin/servicemanager
class core
user system
group system
critical
onrestart restart healthd
onrestart restart zygote
onrestart restart media
onrestart restart surfaceflinger
onrestart restart drm
//surfaceflinger可触发zygote重启
service surfaceflinger /system/bin/surfaceflinger
class core
user system
group graphics drmrpc
onrestart restart zygote
由上可知:
所以,surfaceflinger,servicemanager,zygote自身以及system_server进程被杀都会触发Zygote重启。
当某个进程A,通过property_set()修改属性值后,init进程会检查访问权限,当权限满足要求后,则更改相应的属性值,属性值一旦改变则会触发相应的触发器(即rc文件中的on开头的语句),在Android Shared Memmory(共享内存区域)中有一个_system_property_area_区域,里面记录着所有的属性值。对于进程A通过property_get()方法,获取的也是该共享内存区域的属性值。
[-> property_service.cpp]
void property_init() {
//用于保证只初始化_system_property_area_区域一次
if (property_area_initialized) {
return;
}
property_area_initialized = true;
//创建共享内存
if (__system_property_area_init()) {
return;
}
pa_workspace.size = 0;
pa_workspace.fd = open(PROP_FILENAME, O_RDONLY | O_NOFOLLOW | O_CLOEXEC);
}
该方法核心功能在执行__system_property_area_init()方法,创建用于跨进程的共享内存。主要工作如下:
关于加载的prop文件
通过load_all_load_all_propsprops()方法,加载以下:
[-> property_service.cpp]
void start_property_service() {
property_set("ro.property_service.version", "2");
property_set_fd = CreateSocket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK,
false, 0666, 0, 0, nullptr, sehandle);
listen(property_set_fd, 8);
//设置property文件描述符可读的回调函数【见小节2.3】
register_epoll_handler(property_set_fd, handle_property_set_fd);
}
创建并监听名叫“property_service”的socket,再利用epoll_ctl设置property文件描述符触发可读时的回调函数为handle_property_set_fd,接下来看看该函数的实现。
static void handle_property_set_fd() {
static constexpr uint32_t kDefaultSocketTimeout = 2000; /* ms */
int s = accept4(property_set_fd, nullptr, nullptr, SOCK_CLOEXEC);
struct ucred cr;
socklen_t cr_size = sizeof(cr);
getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0);
SocketConnection socket(s, cr);
uint32_t timeout_ms = kDefaultSocketTimeout; //设置2秒超时
uint32_t cmd = 0;
if (!socket.RecvUint32(&cmd, &timeout_ms)) {
socket.SendUint32(PROP_ERROR_READ_CMD);
return;
}
switch (cmd) {
case PROP_MSG_SETPROP: {
char prop_name[PROP_NAME_MAX];
char prop_value[PROP_VALUE_MAX];
if (!socket.RecvChars(prop_name, PROP_NAME_MAX, &timeout_ms) ||
!socket.RecvChars(prop_value, PROP_VALUE_MAX, &timeout_ms)) {
return;
}
prop_name[PROP_NAME_MAX-1] = 0;
prop_value[PROP_VALUE_MAX-1] = 0;
//设置property【见小节5.4】
handle_property_set(socket, prop_value, prop_value, true);
break;
}
case PROP_MSG_SETPROP2: {
std::string name;
std::string value;
if (!socket.RecvString(&name, &timeout_ms) ||
!socket.RecvString(&value, &timeout_ms)) {
socket.SendUint32(PROP_ERROR_READ_DATA);
return;
}
//设置property【见小节5.4】
handle_property_set(socket, name, value, false);
break;
}
default:
socket.SendUint32(PROP_ERROR_INVALID_CMD);
break;
}
}
这里针对socket接收事件设置2秒超时,也就是说property的设置过程有可能耗时。
static void handle_property_set(SocketConnection& socket,
const std::string& name,
const std::string& value,
bool legacy_protocol) {
const char* cmd_name = legacy_protocol ? "PROP_MSG_SETPROP" : "PROP_MSG_SETPROP2";
if (!is_legal_property_name(name)) { //检查属性名是否合规
socket.SendUint32(PROP_ERROR_INVALID_NAME);
return;
}
struct ucred cr = socket.cred();
char* source_ctx = nullptr;
getpeercon(socket.socket(), &source_ctx);
if (android::base::StartsWith(name, "ctl.")) {
if (check_control_mac_perms(value.c_str(), source_ctx, &cr)) {
//处理以ctl.开头的属性
handle_control_message(name.c_str() + 4, value.c_str());
}
...
} else {
if (check_perms(name, source_ctx, &cr)) {
//设置属性名和属性值
uint32_t result = property_set(name, value);
}
...
}
freecon(source_ctx);
}
这里会检测属性名是否合规,具体检查规范如下:
bool is_legal_property_name(const std::string& name) {
size_t namelen = name.size();
if (namelen < 1) return false;
if (name[0] == ‘.‘) return false;
if (name[namelen - 1] == ‘.‘) return false;
/* Only allow alphanumeric, plus ‘.‘, ‘-‘, ‘@‘, ‘:‘, or ‘_‘ */
/* Don‘t allow ".." to appear in a property name */
for (size_t i = 0; i < namelen; i++) {
if (name[i] == ‘.‘) {
// i=0 is guaranteed to never have a dot. See above.
if (name[i-1] == ‘.‘) return false;
continue;
}
if (name[i] == ‘_‘ || name[i] == ‘-‘ || name[i] == ‘@‘ || name[i] == ‘:‘) continue;
if (name[i] >= ‘a‘ && name[i] <= ‘z‘) continue;
if (name[i] >= ‘A‘ && name[i] <= ‘Z‘) continue;
if (name[i] >= ‘0‘ && name[i] <= ‘9‘) continue;
return false;
}
return true;
}
uint32_t property_set(const std::string& name, const std::string& value) {
return PropertySetImpl(name, value);
}
static uint32_t PropertySetImpl(const std::string& name, const std::string& value) {
size_t valuelen = value.size();
if (!is_legal_property_name(name)) {
return PROP_ERROR_INVALID_NAME;
}
if (valuelen >= PROP_VALUE_MAX) { //属性名不可过长
return PROP_ERROR_INVALID_VALUE;
}
prop_info* pi = (prop_info*) __system_property_find(name.c_str());
if (pi != nullptr) {
// 以ro.开头的属性不可更改
if (android::base::StartsWith(name, "ro.")
&& strcmp(name.c_str(),"ro.build.software.version")) {
return PROP_ERROR_READ_ONLY_PROPERTY;
}
//更新属性
__system_property_update(pi, value.c_str(), valuelen);
} else {
//添加属性
int rc = __system_property_add(name.c_str(), name.size(), value.c_str(), valuelen);
}
//以persist.开头的属性需要持久化
if (persistent_properties_loaded && android::base::StartsWith(name, "persist.")) {
write_persistent_property(name.c_str(), value.c_str());
}
//属性值改变的通知过程
property_changed(name, value);
return PROP_SUCCESS;
}
不同属性执行逻辑有所不同,主要区分如下:
ctl.开头,则表示是控制消息,控制消息用来执行一些命令。例如:
ro.开头,则表示是只读的,不能设置,所以直接返回;persist.开头,则需要把这些值写到对应文件;需要注意的是,persist用于持久化保存某些属性值,当同时也带来了额外的IO操作。init进程(pid=1)是Linux系统中用户空间的第一个进程,主要工作如下:
可见init进程在开机之后的核心工作就是响应property变化事件和回收僵尸进程。当某个进程调用property_set来改变一个系统属性值时,系统会通过socket向init进程发送一个property变化的事件通知,那么property fd会变成可读,init进程采用epoll机制监听该fd则会 触发回调handle_property_set_fd()方法。回收僵尸进程,在Linux内核中,如父进程不等待子进程的结束直接退出,会导致子进程在结束后变成僵尸进程,占用系统资源。为此,init进程专门安装了SIGCHLD信号接收器,当某些子进程退出时发现其父进程已经退出,则会向init进程发送SIGCHLD信号,init进程调用回调方法handle_signal()来回收僵尸子进程。
标签:内存 tmp argc 状态 充电 hold crash zed 重要
原文地址:https://www.cnblogs.com/Oude/p/12368805.html