标签:database 不能 map center poi 连续 迭代 结构 init
转载请注明出处,谢谢
原创作者:Mingrui
原创链接:https://www.cnblogs.com/MingruiYu/p/12369339.html
本文要点:
之前的 ORB-SLAM2 系列文章中,我们已经对 Tracking 线程和 LocalMapping 进行了介绍。我们将在本文中,对 ORB-SLAM2 系统的 LoopClosing 线程进行介绍。
依旧祭出该图,方便查看:
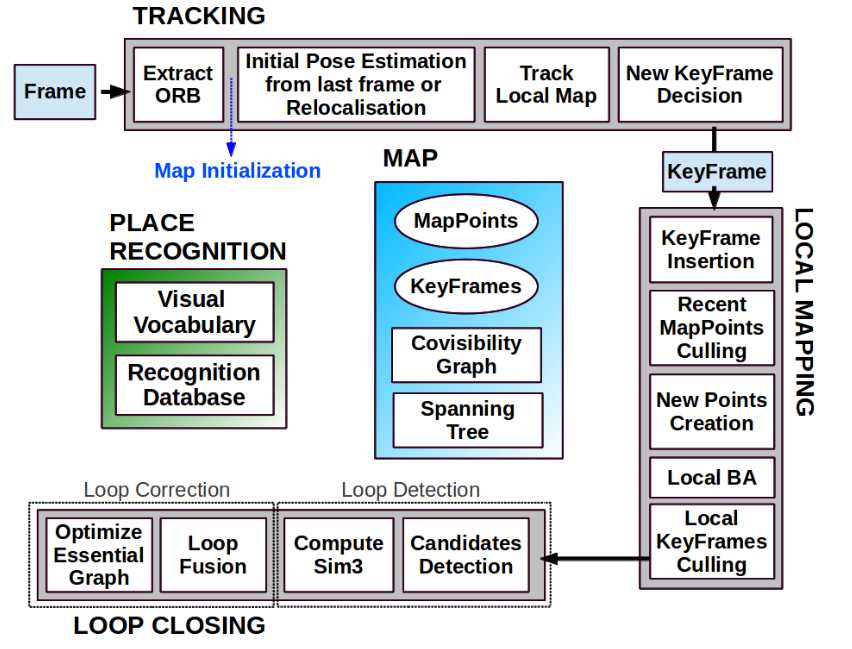
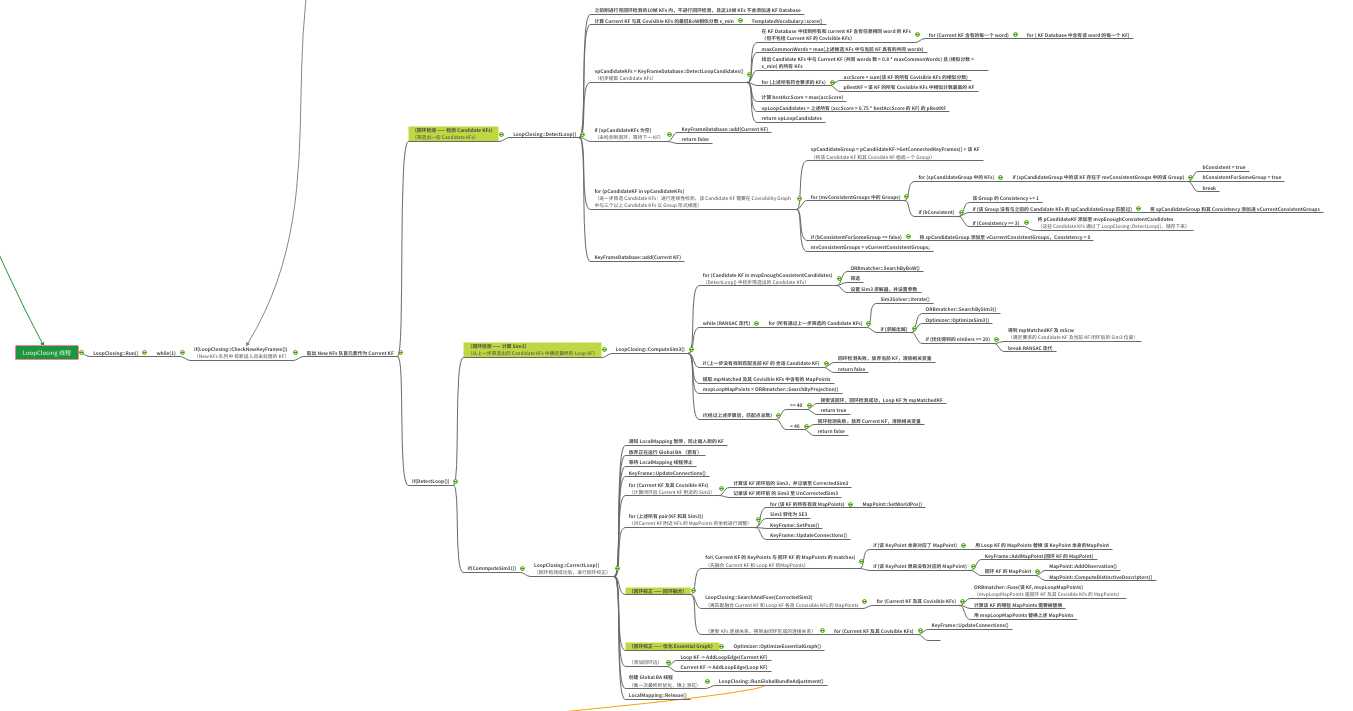
也再次献上我绘制的程序导图全图:ORB-SLAM2 程序导图
老规矩,还是分两部分:以 ORB-SLAM 论文为参考 和 以 ORB-SLAM2 代码(程序导图)为参考。
LoopClosing 线程的大致步骤如下:
这些步骤可以归为两类:
下面我们对每一个步骤进行详细的介绍。
在之前的 LocalMapping 线程中,会对 KFs 进行筛选,最终在 Map 中保留必要的 KFs。经过筛选后的 KFs,会送入 LoopClosing 线程,每一个新送入的 Current KF,都会检测在 KF Database 中,有没有以前路过的 KF,与 Current KF 相匹配,从而可以进行回环校正。
这一步的目的是初步筛选出一批 Candidate KFs。
首先,会依据 KF 的 BoW 计算 Current KF 与其每一个 Covisible KF 之间的相似分数,取最低分作为 \(s_{min}\),Candidate KFs 与 Current KF 之间的相似分数至少要大于 \(s_{min}\)(动态计算选择 Candidate KFs 的阈值)。
另外,Current KF 的 Covisible KFs 是不能成为 Candidate KFs 的。
再之后,还要进行连续性检测,进一步筛选 Candidate KFs:该 Candidate KF 需要在 Covisibility Graph 中与三个以上 Candidate KFs 以 Group 形式相连。
(以上部分论文中说的比较含糊,看代码会相对清晰,下文会详述)
在回环校正的时候,我们需要对 Current KF 和 Loop KF 之间的相对误差进行描述。但是注意,在单目 SLAM 中,是有7个自由度的:6 + 尺度。也就是说,对于单目 SLAM,在运行过程中的累计漂移,除了平移漂移,旋转漂移之外,还会有尺度漂移。可能跟着跟着轨迹和 Map 的尺度都整体缩小了。如果仅计算 SE3 的话,没法很好的对回环进行校正,所以提出了 Sim3(相似变换群):
\(\operatorname{sim}(3)=\left\{\left[\begin{array}{cc} {S=} & {s \boldsymbol{R}} & {t} \\ {\mathbf{0}^{T}} & {1} \end{array}\right] \in \mathbb{R}^{4 \times 4}\right\}\)
其中 \(S\) 就是相似变换,其在欧式变换的基础上加上了一个尺度因子 \(s\)。
ORB-SLAM 会计算 Current KF 与 Candidiate KF 之间的相似变换,并据此确定最终的 Loop KF,其步骤如下:
至此,就为 Current KF 确定了一个 Loop KF,Loop Detection 部分就完成了,之后就进入 Loop Correction。
回环融合分以下几步:
上述回环校正只对 Current KF 附近的 KFs 进行了校正,但是累计误差是慢慢积累的,一路上每个 KF 都应该接受校正。
ORB-SLAM 采用了对 Essential Graph 进行位姿图优化的方式。该优化是 Sim3 优化,以便校正尺度漂移。
请点击 ORB-SLAM2 程序导图链接(文首)查看清晰全图
与 LocalMapping 线程一样,LoopClosing 线程干的第一件事,也是检查新 KF 队列中有没有未处理的 KF,有的话,取出队首元素作为 Current KF。
LoopClosing::DetectLoop(),首先,之前刚进行完回环检测的10帧 KFs 内,不进行回环检测,且这10帧 KFs 不会添加进 KF Database。
首先,计算 \(s_{min}\)。
之后,KeyFrameDatabase::DetectLoopCandidates() 筛选,除了论文中提到的根据 \(s_{min}\) 筛选,还要求 Candidate KF 与 Current KF 的共同 word 数 > 0.8 * 任意 KF 与 Current KF 的最多共同 word 数(但不包括 Current KF 的 Covisible KFs)。
之后,还要再筛选一次:对上述所有符合要求的 KFs,还要将它和其所有 Covisible KFs 组成一组,计算该组的相似分数之和,并且找出该组内相似分数最高的 KF。将所有 (总分数 > 0.75 * 最高组分数) 的组的最高分 KF 选入 Candidate KFs,送入下一步(这一步的意义是,如果单蹦出一 KF 相似分数很高,但它附近的 KFs 的相似分数都很低,那么可能这 KF 分高是不可靠的,需要筛掉)。
进一步筛选 Candidate KFs:进行连续性检测,该 Candidate KF 需要在 Covisibility Graph 中与三个以上 Candidate KFs 以 Group 形式相连。
什么是以 Group 形式相连呢?假设 KF1 及其 Covisible KFs 组成 Group1,KF2 及其 Covisible KFs 组成 Group2;如果 Group1 与 Group2 含有相同的 KF,则两个 Group 相连。
所以如果一个 Candidate KF 的 Group 与 另外 3 个 Candidate KFs 的 Groups 相连,则通过筛选,进入下一环节。
LoopClosing::ComputeSim3(),上一步中,会得到好几个 Candidate KF,这一步的目的之一是的到最终的 Loop KF,另外,还要计算的到 Current KF 与 Loop KF 之间的相似变换。
注: 从上述回环检测的步骤可以看出,ORB-SLAM2 在检测回环时,分层地进行了大量的筛选步骤。这样,一是为了保证 Loop KF 的准确性,二是避免出现大量相似回环:一般来说,因为场景是连续的,所以出现回环的地方,一般会出现一连串差不多的回环,这些筛选的步骤避免了添加重复的回环,也是减轻 LoopClosing 线程的负担。
LoopClosing::CorrectLoop(),首先让通知 LocalMapping 暂停,防止插入新的 KF,并等待 LocalMapping 线程停止。期间还要停止正在进行的 Global BA(如果有的话)。
与论文中描述的一致。
注意其中 MapPoints 的融合:将 Loop KF 所含的 MapPoints 与 Current KF 的 FeaturePoints 进行匹配,匹配上的话就将该 MapPoint 与 那个 FeaturePoint 链接上,但如果 Current KF 的该 FeaturePoint 已经链接上了某个 MapPoint,则用 Loop KF 的 MapPoint 替换掉原来链接的 MapPoint。
之后,再将 Loop KF 的 Covisible KFs 与 Current KF 的 Covisible KFs 两部分的 MapPoints 做匹配,使用 ORBmatcher::Fuse()。
最后,更新这局部的 Convisibility Graph。
Optimizer::OptimizeEssentialGraph()
注意,这之后的 Loop KF -> AddLoopEdge(Current KF) 和 Current KF -> AddLoopEdge(Loop KF) 只是记录回环边。Convisibility Graph 在之前已经更新过了。
上述步骤全部进行完了之后,精度已经很高了,但 ORB-SLAM2 还是选择在最后再进行一次 Global BA 锦上添花(ORB-SLAM1 中似乎没有这步)。注意,为了不影响主要3个线程的工作,这里创建了第4个线程,专门进行 Global BA。但该 Global BA 随时可能被打断,只有在系统特别闲的时候才会运行。
ORB-SLAM2 论文&代码学习 —— LoopClosing 线程
标签:database 不能 map center poi 连续 迭代 结构 init
原文地址:https://www.cnblogs.com/MingruiYu/p/12369339.html