标签:can multitask change code chm nts -o init sdn
Goals for the lecture:
Introduction & overview of the key methods and developments.
[Good starting point for you to start reading and understanding papers!]
原文链接:

When is standard machine learning not enough?
Standard ML finally works for well-defined, stationary tasks.
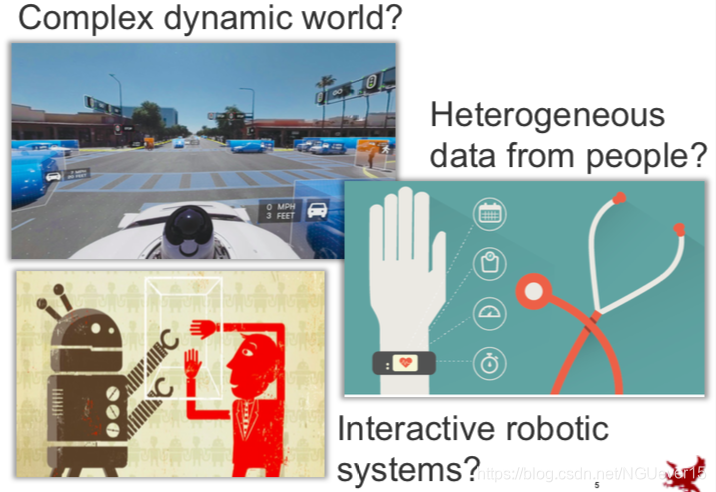
But how about the complex dynamic world, heterogeneous data from people and the interactive robotic systems?
What is meta-learning?
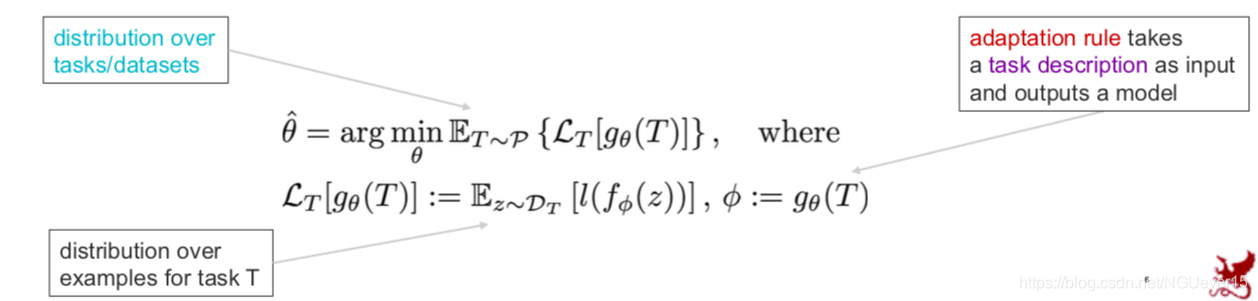
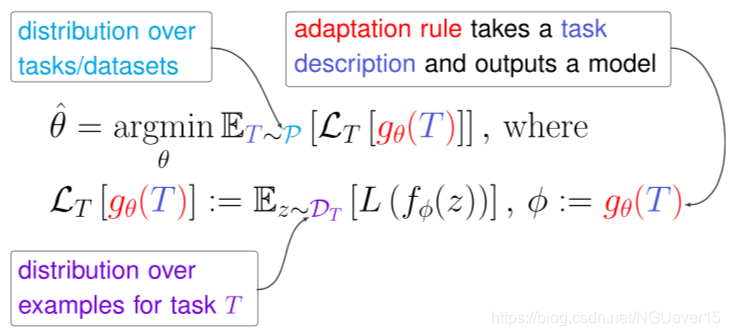
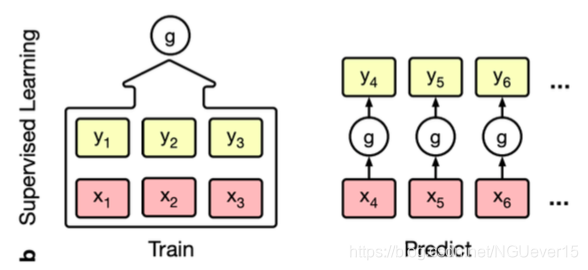
Standard learning: Given a distribution over examples (single task), learn a function that minimizes the loss:

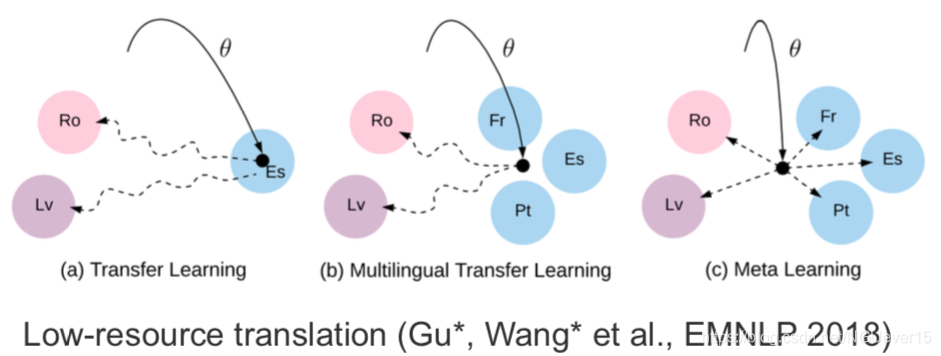
Learning-to-learn: Given a distribution over tasks, output an adaptation rule that can be used at test time to generalize from a task description
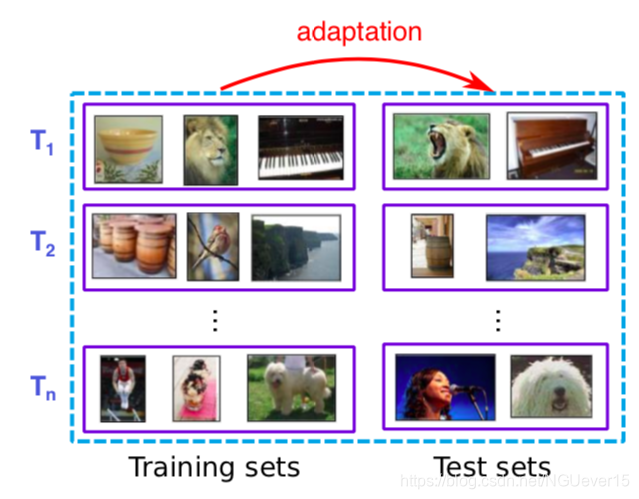
A Toy Example: Few-shot Image Classification
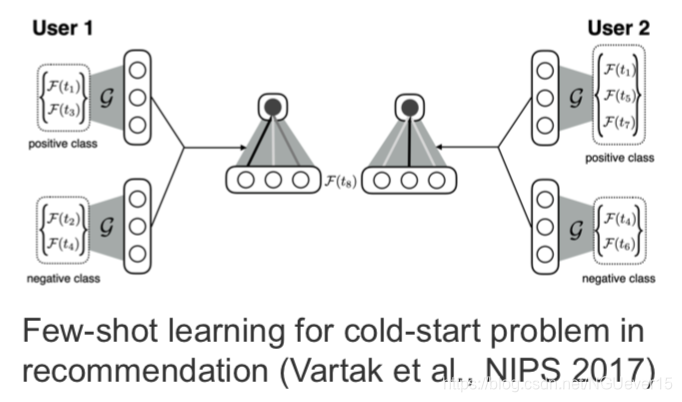
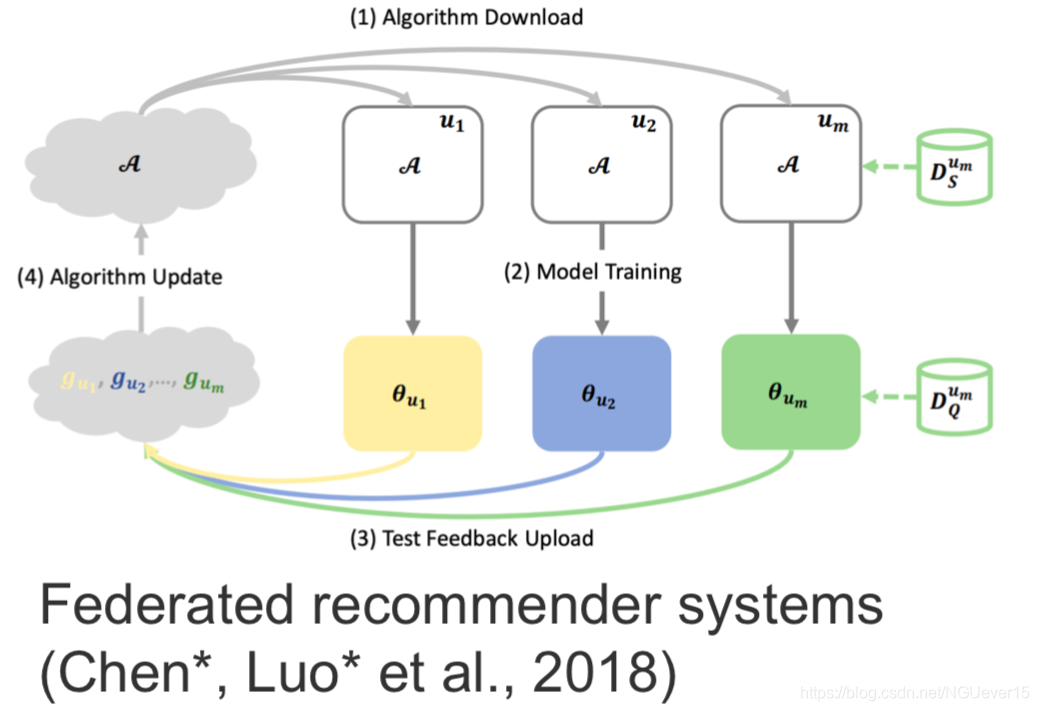
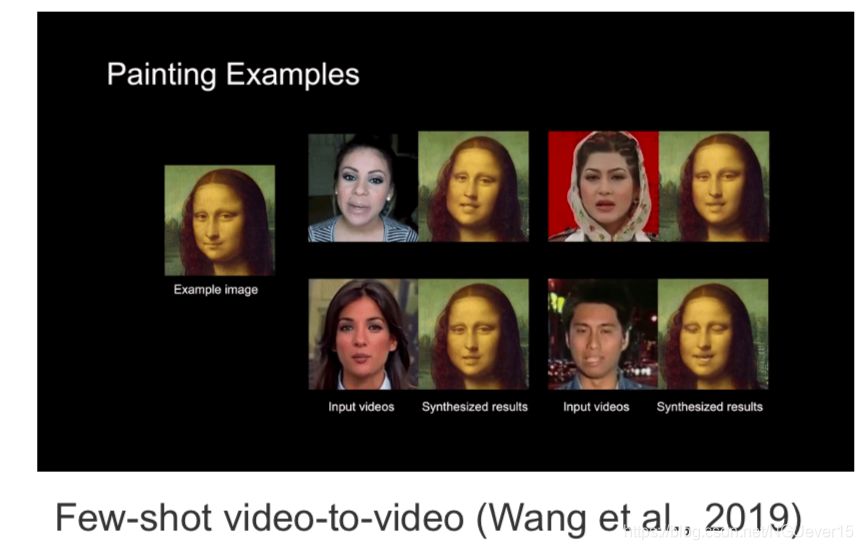
Other (practical) Examples of Few-shot Learning
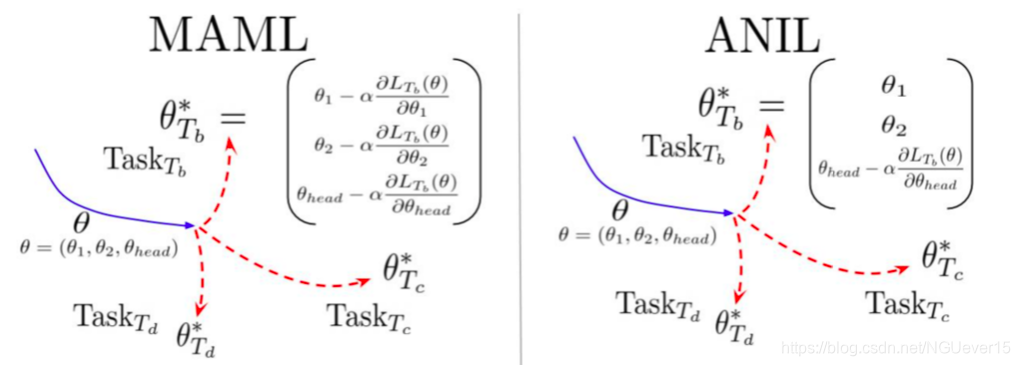
Model-agnostic Meta-learning (MAML) 与模型无关的元学习


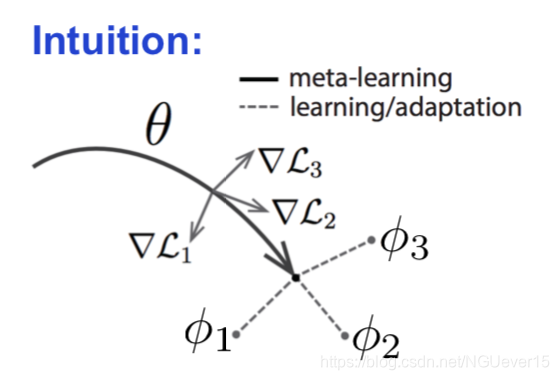
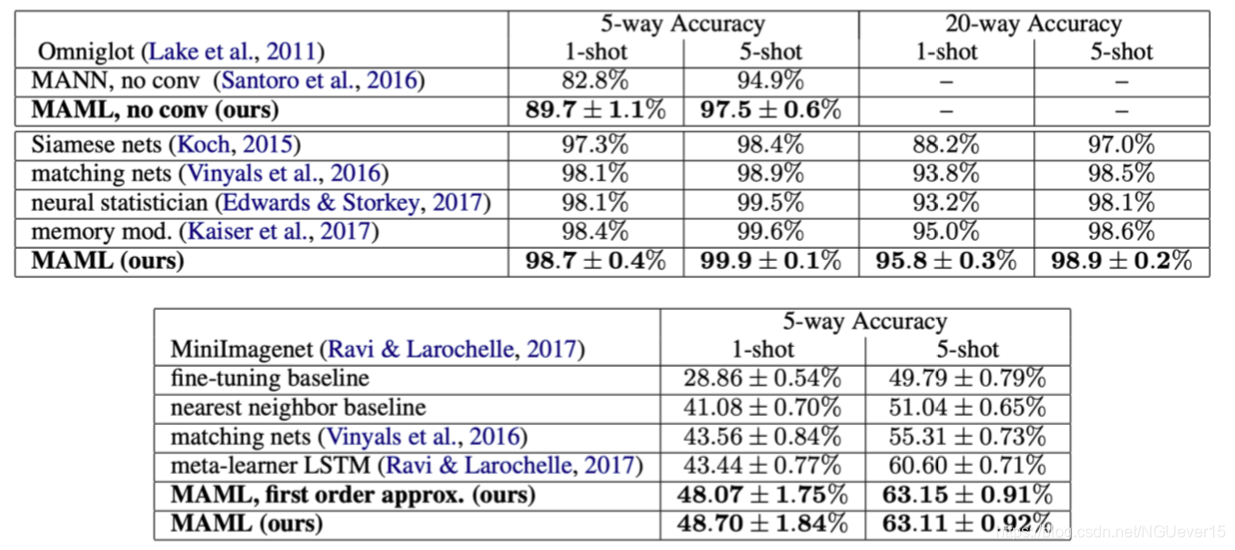
Does MAML Work?
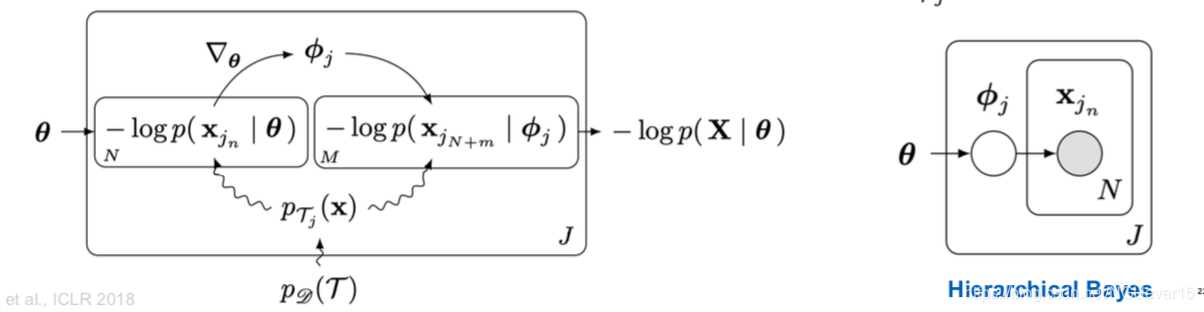
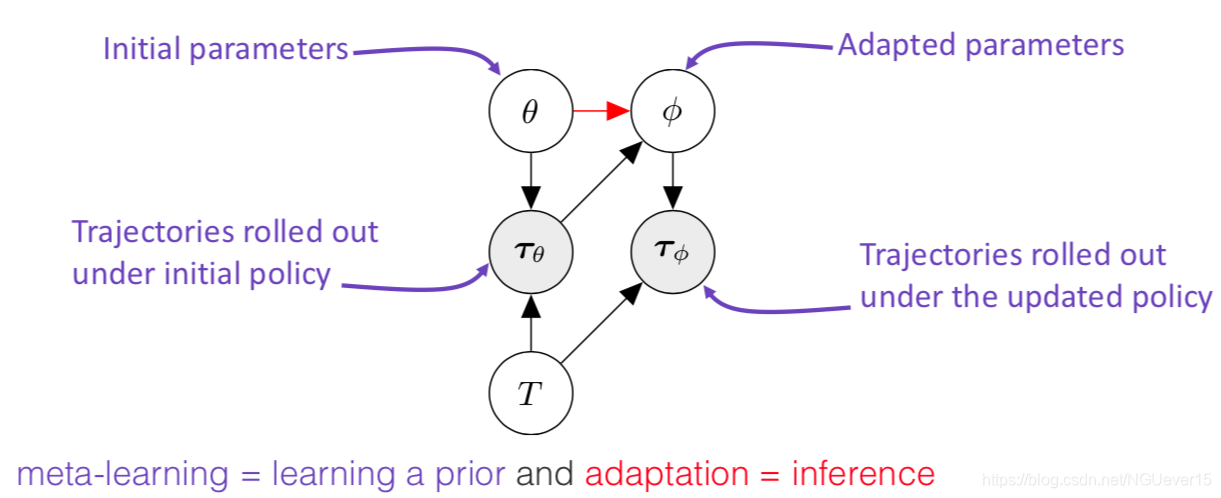
MAML from a Probabilistic Standpoint
Training points: 
testing points:
MAML with log-likelihood loss对数似然损失:

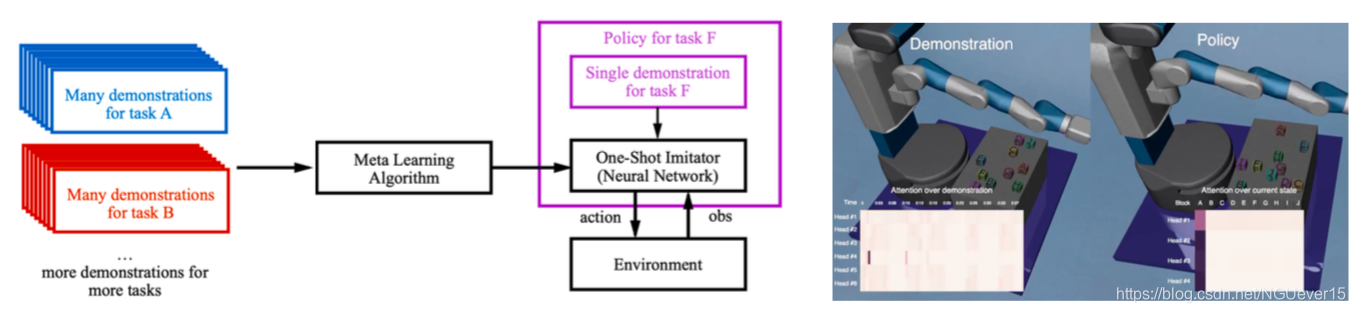
One More Example: One-shot Imitation Learning 模仿学习
Prototype-based Meta-learning
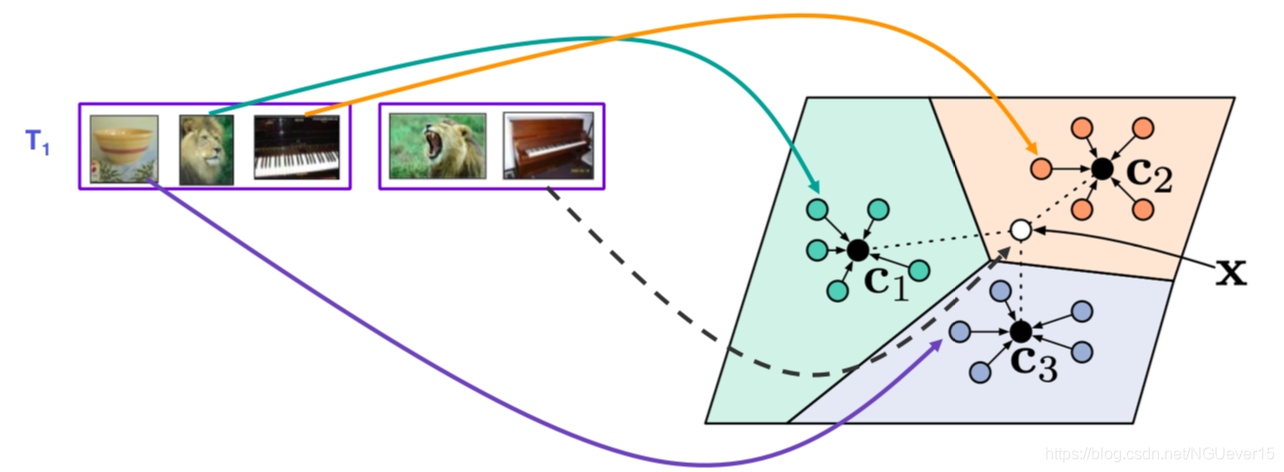
Prototypes:
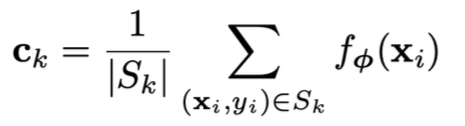
Predictive distribution:

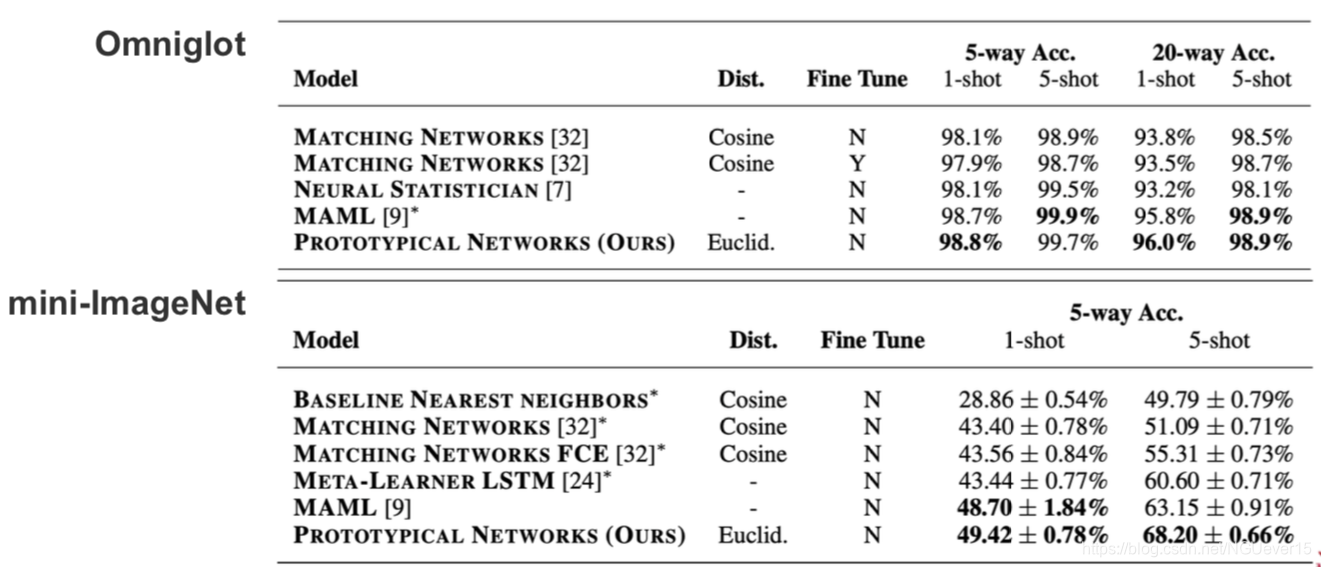
Does Prototype-based Meta-learning Work?
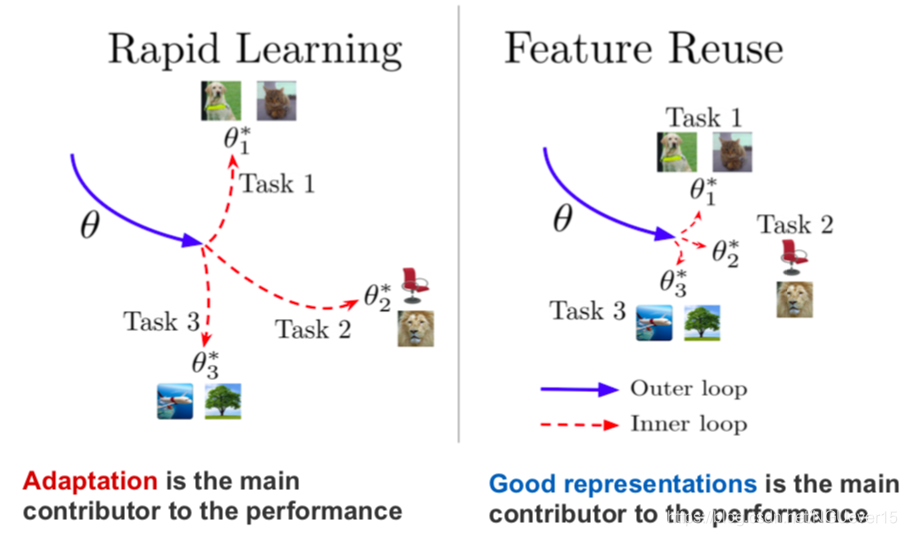
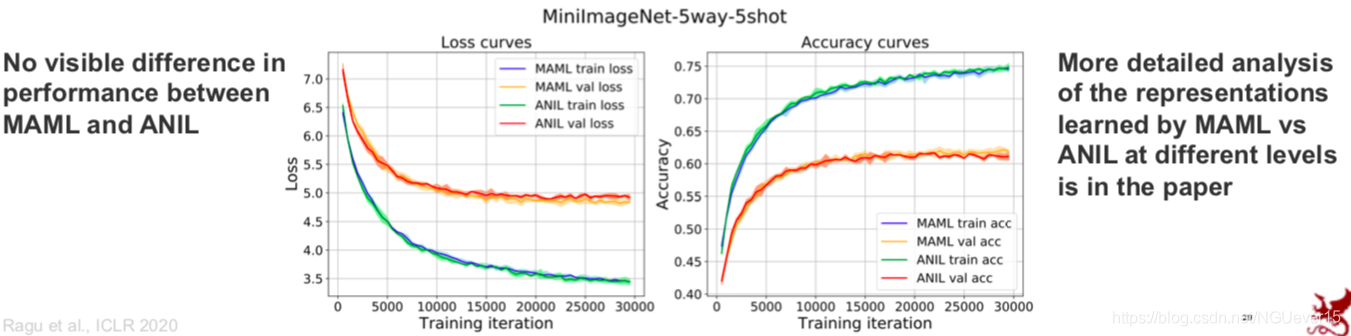
Rapid Learning or Feature Reuse 特征重用
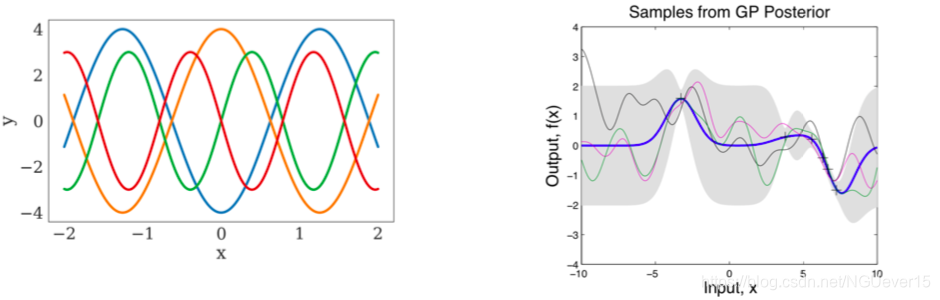
Drawing parallels between meta-learning and GPs
In few-shot learning:
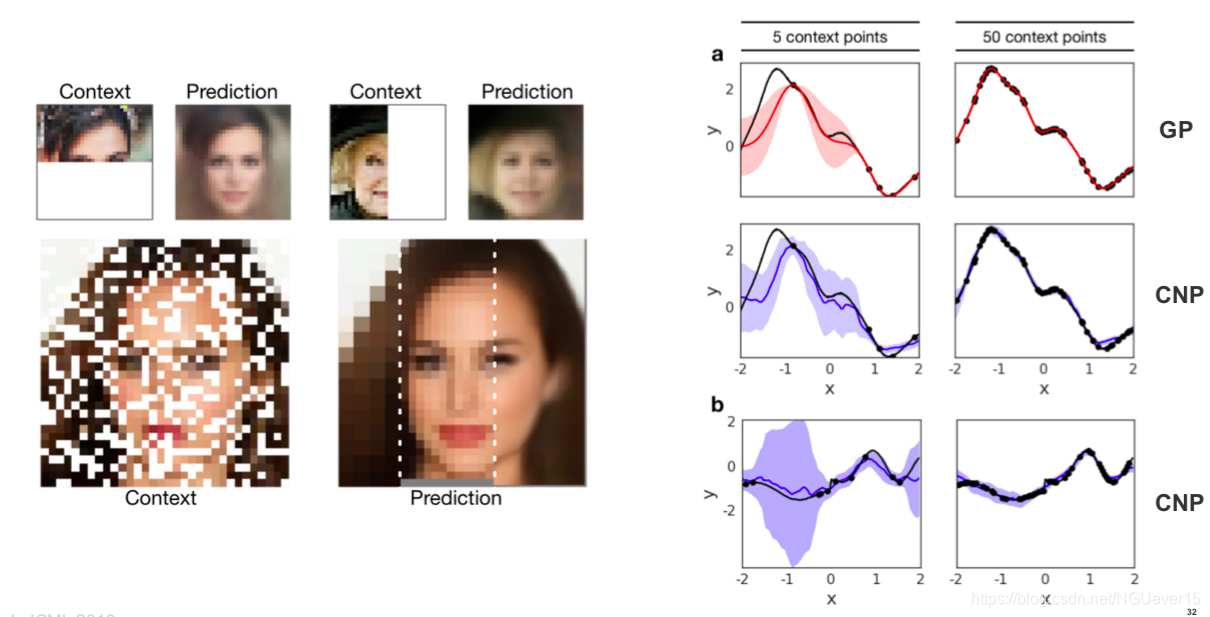
Recall Gaussian Processes (GPs): 高斯过程
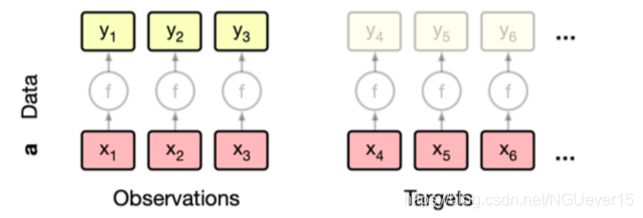
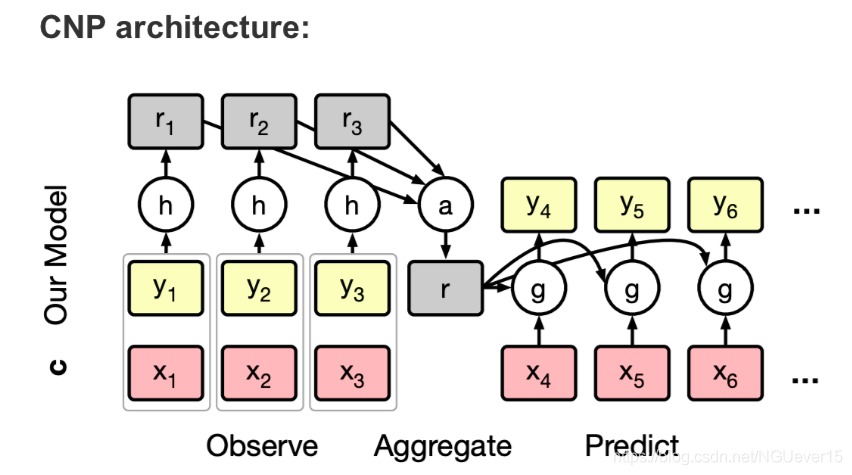
Conditional Neural Processes 条件神经过程
On software packages for meta-learning
A lot of research code releases (code is fragile and sometimes broken)
A few notable libraries that implement a few specific methods:
Takeaways
Recall the definition of learning-to-learn
Standard learning: Given a distribution over examples (single task), learn a function that minimizes the loss:

Learning-to-learn: Given a distribution over tasks, output an adaptation rule that can be used at test time to generalize from a task description

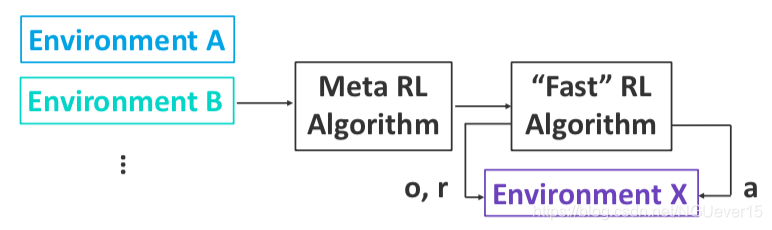
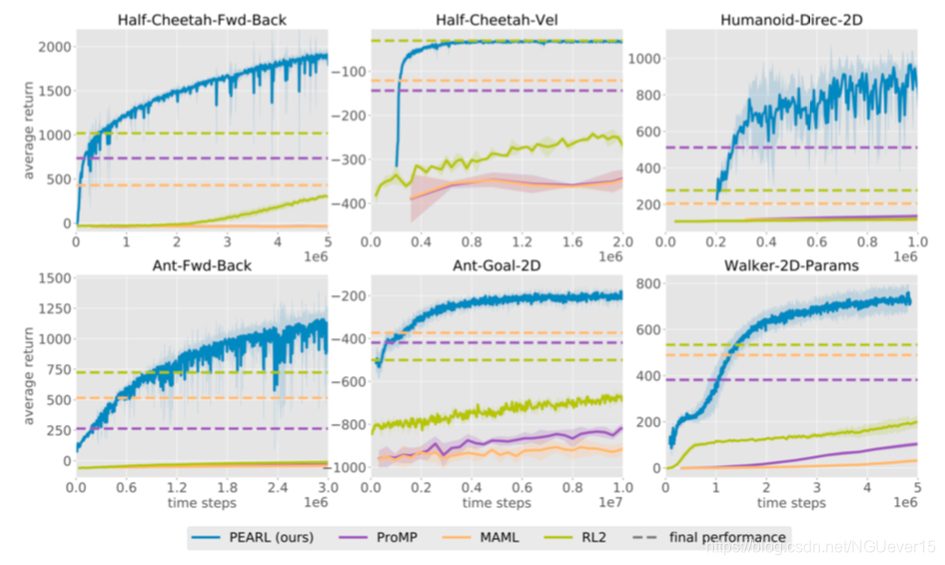
Meta reinforcement learning (RL): Given a distribution over environments, train a policy update rule that can solve new environments given only limited or no initial experience.
Meta-learning for RL
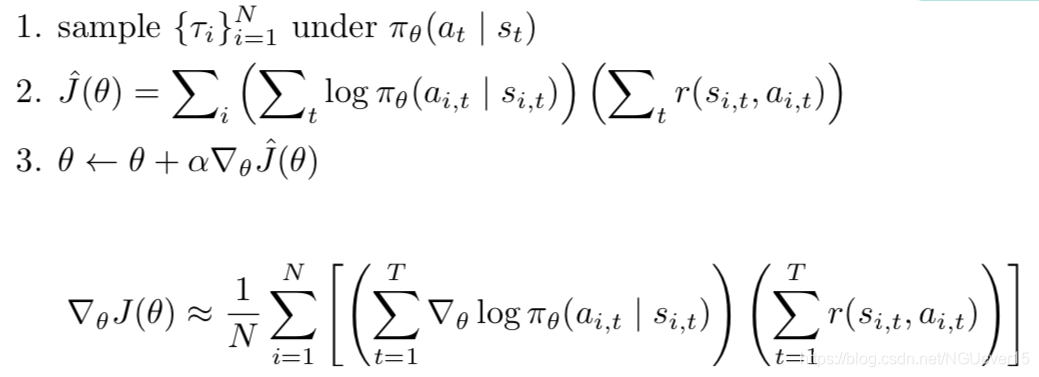
On-policy RL: Quick Recap 符合策略的RL:快速回顾
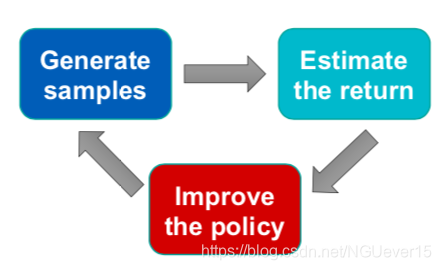
REINFORCE algorithm:
On-policy Meta-RL: MAML (again!)
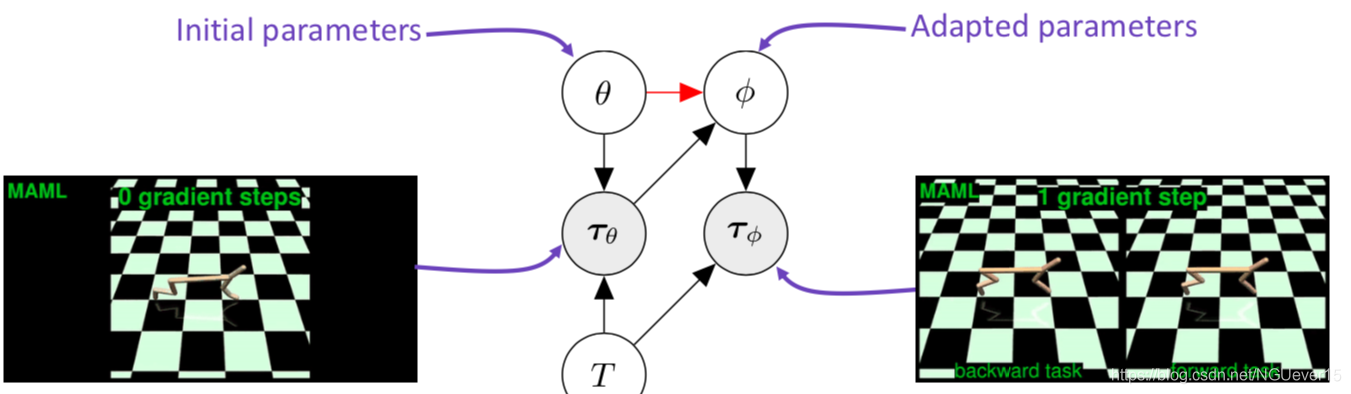
Key points:
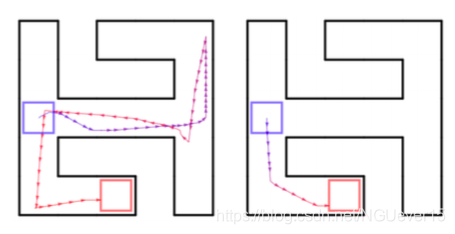
Adaptation in nonstationary environments 不稳定环境
Classical few-shot learning setup:
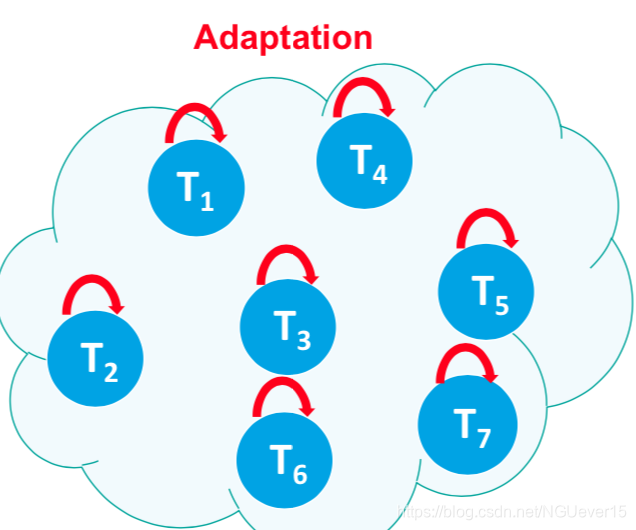
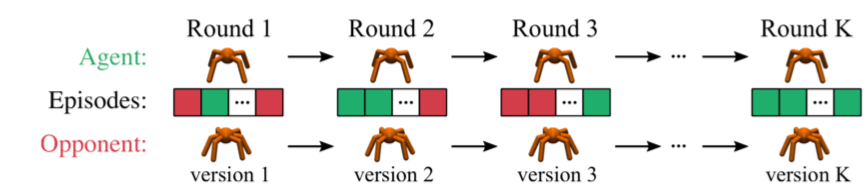
 Each new round is a new task. Nonstationary environment is a sequence of tasks.
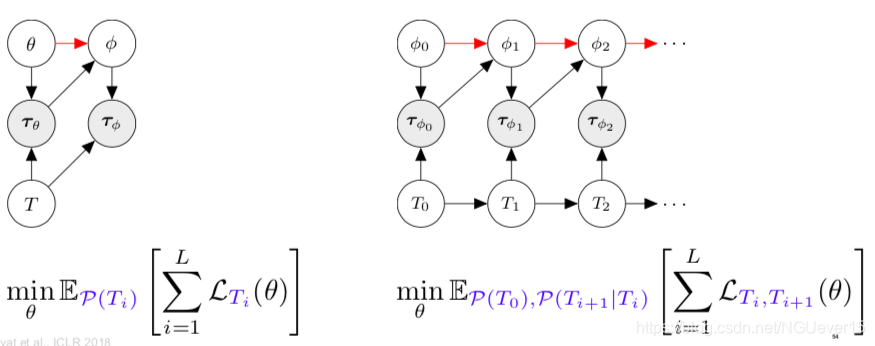
Each new round is a new task. Nonstationary environment is a sequence of tasks.Continuous adaptation setup:
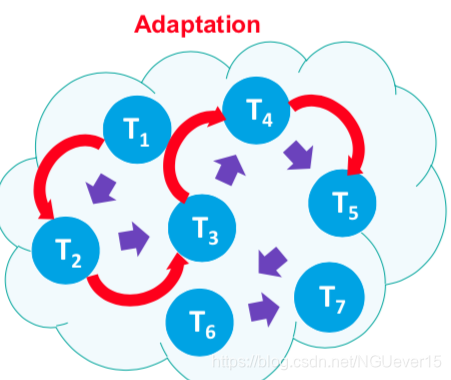
Treat policy parameters, tasks, and all trajectories as random variables
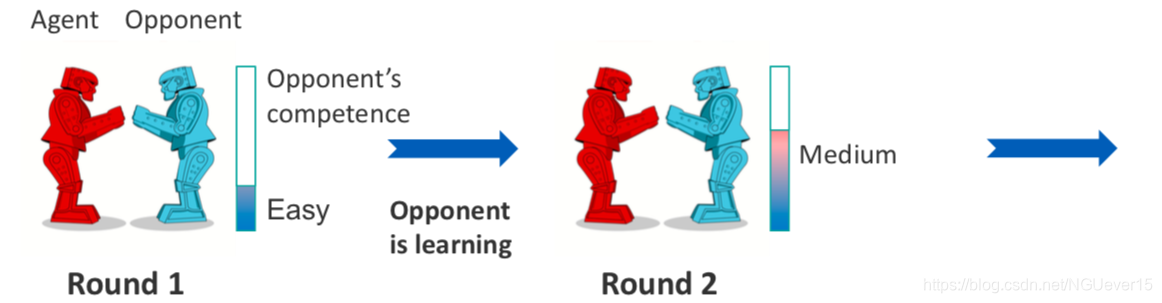
RoboSumo: a multiagent competitive env
an agent competes vs. an opponent, the opponent’s behavior changes over time
Takeaways
卡耐基梅隆大学(CMU)元学习和元强化学习课程 | Elements of Meta-Learning
标签:can multitask change code chm nts -o init sdn
原文地址:https://www.cnblogs.com/joselynzhao/p/12892696.html