标签:users 内核 shell 就会 for 时间 sleep linux中 slice
一、概述
决定何时、如何选择一个新进程运行的这组规则叫做:调度策略(scheduling policy)。
Linux的调度是基于分时技术(time sharing):多个进程以“时间多路复用”方式运行,因为CPU的时间呗分成“片”(slice),给每个可运行进程分配一片。如果当前运行进程的时间片或时限(quantum)到期时,该进程还没有运行完毕,进程切换就会发生。
调度策略也是根据进程的优先级对它们进行分类。在Linux中,进程优先级是动态的:在较长时间内没有运行的进程,会动态提升它们的优先级;相反地,对于在CPU上运行较长时间的进程,会降低它们的优先级来惩罚它们。
所以,实现调度的工具是调度器(scheduler),调度的对象是进程(process),调度的方法是调度策略(包括调度算法)。
二、CPU调度器
这里主要讲了cpu调度器的工作内容和目的:
- 多个task会共享CPU资源
- 那如何进行任务切换选择呢?
-
- 当前运行的task中止
- 当前运行的task sleep(wait event)
- 新task创建,或者sleep的task唤醒了
- 当前运行的task的时间片用完
那调度器的目标是什么?
- 公平调度各个task
- 基于task的优先级来分配时间片
- task的respnse时间短
- 高throughput(task执行成功)
- 在多个cpu间,负载均衡
- 低功耗
- 调度器代码运行开销低
调度器会和工作在一些框架、服务器、PC、嵌入式/手机中。
三、O(1)调度器
在2.6.23(2007)以前,Linux调度器使用的是O(1)调度器:
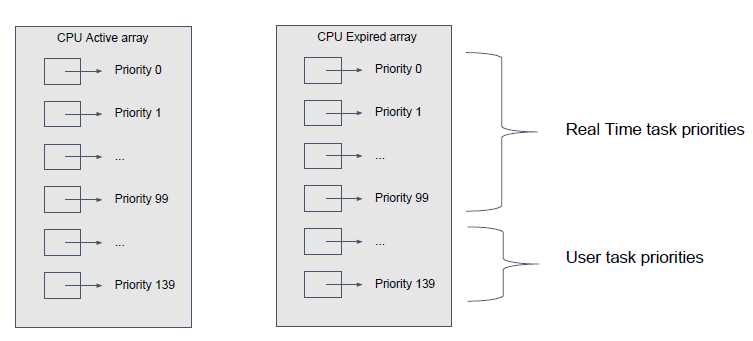
- 调度器分140个优先级等级:0-99是RT task,100-139是User task
- 每个cpu的runqueue有2个数组:Active,Expaired
- 每个数组都有140个entry,对应每个优先级
- 每个entry是一条FIFO队列结构的链表
- 140位的bitmap用来检测每个优先级list
- 时间片会根据task的优先级进行分配
- 运行时间expaire的task会从Active数组移动到Expaired数组
- 当Active数组为空时,就交换2个数组。即,将Expaired数组变为Active;Active(此时为空)变为Expaired
- task的入rq和出rq,以及next task的选择都是在固定时间内完成
最后在O(1)调度器已经被CFS替代。
四、当前调度器架构
- 在kernel 2.6.23(2007)后,由Ingo Molnar引入
- 在调度的class中,还存在调度policy
- 不同的调度class,高优先级的,越早执行
- task可以在cpu、调度policy、调度class间进行迁移
4.1 调度class
由struce sched_class结构体实现:
struct sched_class {
const struct sched_class *next;
void (*enqueue_task) (struct rq *rq, struct task_struct *p, int flags);
void (*dequeue_task) (struct rq *rq, struct task_struct *p, int flags);
...
struct task_struct * (*pick_next_task) (struct rq *rq, struct task_struct *prev, struct rq_flags *rf);
...
};
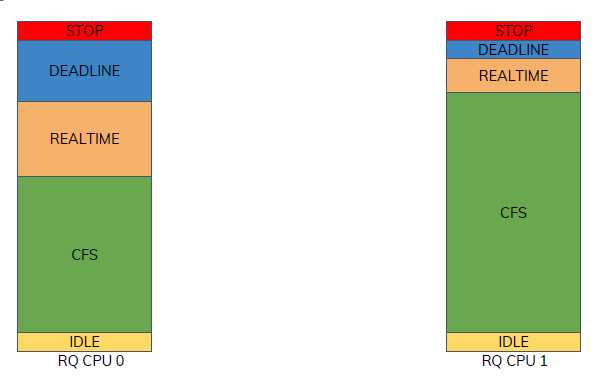
内核中一共有5中调度class,优先级从高到低:STOP > DL > RT > CFS > IDLE,他们通过链表实现,并链接起来的。

4.2 主调度函数Schedule()
内核中进程调度,最主要的实现是Schedule()函数。它完成如下工作:
- 选取下一个runnable的task,并将task放在cpu上运行
- 按class优先级搜索task来运行,最先从STOP class开始
- 轮询搜索:for_each_class()
- 实现方式:pick_next_task():
again:
for_each_class(class) {
p = class->pick_next_task(rq, prev, rf);
if (p) {
if (unlikely(p == RETRY_TASK))
goto again;
return p;
}
}
/* The idle class should always have a runnable task: */
BUG();
4.3 调度class与policy
在不同的调度class下,可能会有不同的调度policy实现:
● Stop
○ No policy
● Deadline
○ SCHED_DEADLINE
● Real Time
○ SCHED_FIFO
○ SCHED_RR
● Fair
○ SCHED_NORMAL
○ SCHED_BATCH
○ SCHED_IDLE
● Idle
○ No policy
不同的class代表不同的调度优先级;不同的policy同样也意味着不同的调度方式。
4.4 调度class:STOP
STOP类型的class有如下特点:
- 是最高优先级的class(但是这个class不开放给系统user使用的)
- 只能在smp系统上可用(stop_machine()在单核处理器下不可用)------括号内的具体没怎么理解
- 可以抢占所有task,并任何事件都不能抢占它
- 实现方式是:停止运行的其他所有task,而在cpu上运行一个特定的函数
- 没有调度policy
- 属于stop class的per cpu内核线程:migration/N ------“N”为cpu core number
- 在以下情况下使用:task迁移、CPU hotplug、RCU、ftrace、cloclevents等
4.5 调度class:Deadline(DL)
Deadline类型的class有如下特点:
- 在kernel 3.14(2013),由Dario Faggioli & Juri Lelli引入
- 在系统中,属于可以使用的最高优先级的class
- 调度policy为SCHED_DEADLINE
- 由红黑树结构实现(自平衡树)
- 在以下情况下使用:周期性的实时task,例如:视频编解码
4.6 调度Real-time(RT)
Real-time类型的class有如下特点:
- 符合POSIX标准要求
- task优先级范围:0-99
- 优先级在kernel和userspace中相反:0在kernel中,代表最高优先级;而在userspace中代表最低优先级
- 相同优先级下的调度policy:
- SCHED_FIFO
- SCHED_RR,默认时间片长度为100ms
- 由链表实现
- 在以下情况下使用:latency敏感的task,例如:IRQ threads
4.7 调度CFS(Completely Fair Scheduler)
CFS类型的class有如下特点:
- 由Ingo Molnar引入
- 调度policy:
- SCHED_NORMAL:普通task
- SCHED_BATCH:批处理 task(batch task,非交互型)
- SCHED_IDLE:低优先级task
- 由红黑树结构实现
- 跟踪task的虚拟运行时间(vruntime,task拥有的运行时间)
- 虚拟运行时间(vruntime)最短的task,最优先运行
- task的优先级作为权重,会影响虚拟运行时间的计算(vruntime)
- 权重越大,虚拟运行时间(vruntime)计算时的增量就越小
- task的优先级计算:120+nice值(nice范围:-20 ~ +19)
- 用于所有其他类型的task,例如:shell
4.7 调度Idle
Idle类型的class有如下特点:
- 最低优先级的调度class
- 没有调度policy
- 属于idle class的per cpu内核线程(idle):swapper/N ------“N”为cpu core number
- idle线程仅会在没有其他task的情况下,在cpu上运行
- idle线程可以让cpu进入低功耗状态
五、Runqueue
- 每个CPU都由一个struct rq的实例
- 每个”rq“包含了DL、RT、CFS的runqueue
- Runnable的task会被压入上面提到的那些runqueue中
- 在struct rq中由很多其他的信息和状态
struct rq {
...
struct cfs_rq cfs;
struct rt_rq rt;
struct dl_rq dl;
...
}
Linux内核进程调度overview(1)
标签:users 内核 shell 就会 for 时间 sleep linux中 slice
原文地址:https://www.cnblogs.com/lingjiajun/p/10369521.html