标签:image 反馈 时间流 value flight bsp 反射光 option height

var i = 1, p = 0; setInterval(() => { i -= 0.1; p += 0.005; clouds.s(‘shape3d.uv.offset‘, [i, 0]); cloudBackground.s(‘all.uv.offset‘, [p, 0]); }, 100);
dm.enableAnimation(20); plane.setAnimation({ back1: { from: 0, to: 160, easing: ‘Cubic.easeInOut‘, duration: 8000, next: "up1", onUpdate: function (value) { value = parseInt(value); var p3 = this.p3(); this.p3(value, p3[1], p3[2]); } }, //...省略相似 start: ["back1"] });
g3d.addPropertyChangeListener(e => { // 固定中心点 if (e.property === ‘center‘) { e.newValue[0] = center[0]; e.newValue[1] = center[1]; e.newValue[2] = center[2]; } }
然后再把 eye 限制在某一个范围内就大功告成了,然而这里却并不是那么简单,最开始我把 eye 限制在一个立方体的空间内,但交互效果很不理想,考虑到 g3d 默认交互中,鼠标拖拽平移视角变换时,实际上 eye 是在一个以 center 为球心的球面上运动的,所以我决定从这个球中挖出来一块作为 eye 的限制空间,也就是球扇形,不太理解的朋友可以参考这个图:
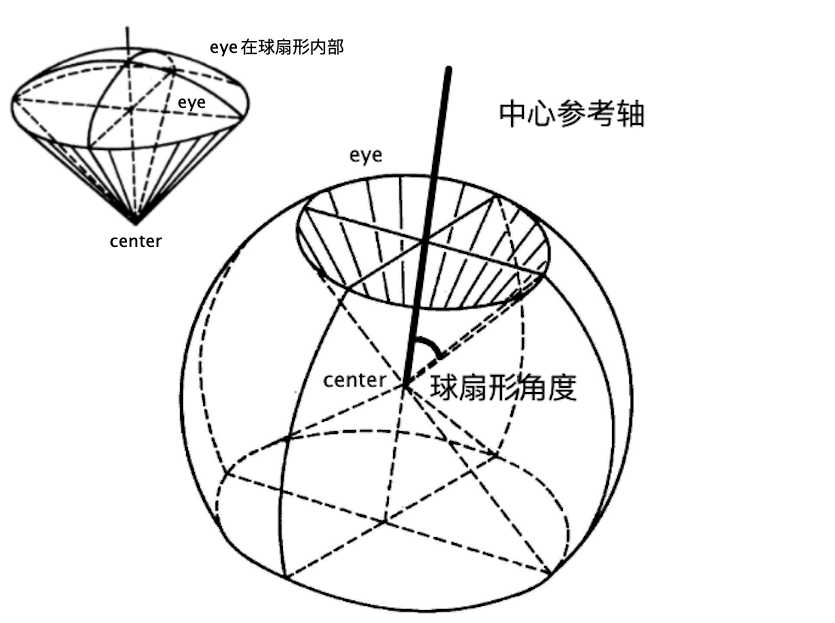
球扇形视角限制,一共需要三个参数,分别是中心参考轴、中心轴和外边所成角度、所在球限制半径,其中中心参考轴可根据初始 eye 和 center 的连接延长线确定,所在球限制半径又分最大限制和最小限制,代码如下:
function limitEye(g3d, eye, center, options) { var limitMaxL = options.limitMaxL, limitMinL = options.limitMinL, limitA = options.limitA; g3d.addPropertyChangeListener(e => { // 固定中心点 if (e.property === ‘center‘) { e.newValue[0] = center[0]; e.newValue[1] = center[1]; e.newValue[2] = center[2]; } // 限制视角 if (e.property === ‘eye‘) { var newEyeV = new ht.Math.Vector3(e.newValue), centerV = new ht.Math.Vector3(center), refEyeV = new ht.Math.Vector3(eye), refVector = refEyeV.clone().sub(centerV), newVector = newEyeV.clone().sub(centerV); if (centerV.distanceTo(newEyeV) > limitMaxL) { newVector.setLength(limitMaxL); e.newValue[0] = newVector.x; e.newValue[1] = newVector.y; e.newValue[2] = newVector.z; } if (centerV.distanceTo(newEyeV) < limitMinL) { newVector.setLength(limitMinL); e.newValue[0] = newVector.x; e.newValue[1] = newVector.y; e.newValue[2] = newVector.z; } if (newVector.angleTo(refVector) > limitA) { var oldLength = newVector.length(), oldAngle = newVector.angleTo(refVector), refLength = oldLength * Math.cos(oldAngle), vertVector, realVector, realEye; refVector.setLength(refLength); newEyeV = newVector.clone().add(centerV); refEyeV = refVector.clone().add(centerV); vertVector = newEyeV.clone().sub(refEyeV); vertLength = refLength * Math.tan(limitA); vertVector.setLength(vertLength); realVector = vertVector.clone().add(refEyeV).sub(centerV); realVector.setLength(oldLength); realEye = realVector.clone().add(centerV); // 防止移动角度大于 180 度,视角反转 if (oldAngle > Math.PI / 2) { realEye.negate(); } e.newValue[0] = realEye.x; e.newValue[1] = realEye.y; e.newValue[2] = realEye.z; } } }) }

var fitFlowP = function (e) { if (e.property === ‘position‘ && e.data === plane) { mapGV.fitData(plane, false); } }; buttonP.s({ ‘interactive‘: true, ‘onClick‘: function (event, data, view, point, width, height) { map.a(‘fitDataTag‘, ‘plane2D‘); mapGV.fitData(plane, false); mapDM.md(fitFlowP); } }); buttonL.s({ ‘interactive‘: true, ‘onClick‘: function (event, data, view, point, width, height) { mapDM.umd(fitFlowP); map.a(‘fitDataTag‘, ‘flyLine‘); mapGV.fitData(flyLine, false); } }); // ...省略


button_JC.s({ ‘interactive‘: true, ‘onClick‘: function (event, data, view, point, width, height) { event.preventDefault(); let g3d = G.g3d, g3dDM = G.g3d.dm(); g3d.fireInteractorEvent({ kind: ‘doubleClickData‘, data: g3dDM.getDataByTag(data.getTag()) }) } }); //...省略
if ((hour > 6 && hour < 19) || (hour == 6 && minutes >= 30)) { timePane && timePane.a({ ‘morning.visible‘: false, ‘day.visible‘: true, ‘dusk.visible‘: false, ‘night.visible‘: false, ‘day.opacity‘: 1 }) skyBox.s({ "shape3d.blend": ‘rgb(127, 200, 240)‘, }) cloudBackground.s({ "back.opacity": 0.7, }) clouds.s({ "shape3d.opacity": 0.7, }) } else if ((hour < 6 || hour > 19) || (hour == 19 && minutes >= 30)) { //...省略 } else if (hour == 6 && minutes < 15 ) { //...省略 } else if (hour == 6 && minutes >= 15 && minutes < 30) { //...省略 } else if (hour == 19 && minutes < 15) { //...省略 } else if (hour == 19 && minutes >= 15 && minutes < 30) { //...省略 }

标签:image 反馈 时间流 value flight bsp 反射光 option height
原文地址:https://www.cnblogs.com/htdaydayup/p/13026792.html