标签:硬件 就是 erb 状态 put 接管 连接 replicate load
说明:本文为论文 《The Design of a Practical System for Fault-Tolerant Virtual Machines》 的个人理解,难免有理解不到位之处,欢迎交流与指正 。
论文地址:VM-FT 论文
本文的总结包括论文内容以及 MIT6.824 Lec4 中的授课内容,其中包含了论文中没有提及的一些细节 。
本论文主要介绍了一个用于提供 容错虚拟机 (fault-tolerant virtual machine) 的企业级商业系统,该系统包含了两台位于不同物理机的虚拟机,其中一台为 primary ,另一台为 backup ,backup 备份了 primary 的所有执行 。当 primary 出现故障时,backup 可以上线接管 primary 的工作,以此来提供容错 。
实现容错服务器的一种常见方法是 主/备份方法 。backup 状态与 primary 保持相同,primary 故障时,使用 backup 进行接管。并且以这种方式将故障对于 client 隐藏,不会丢失任何数据 。
主/备份方法中保持状态同步的方法有以下两种:
State transfer:primary 持续地将所有状态( 包括 CPU、内存和 I/O 设备 )变化发送给 backup 。这种方法所需带宽非常大 。Replicated state machine:将服务器抽象为确定性状态机 。让 primary 和 backup 按照相同的顺序执接收相同的输入请求,对于不确定的操作使用额外的协调来保证主备状态一致 。这种方法实现复杂,但是所需带宽较小 。本文便是采用这种方法 。确定性状态机:多台状态机从相同的初始状态开始、按照相同的顺序执行相同的操作,则它们的最终状态是一致的 。
状态机方法允许 primary 和 backup 进行更大的物理分离 。
虚拟机 ( virtual machine ) 不是通过硬件来启动操作系统,而是在硬件之上会调用一个 Hypervisor ,Hypervisor 的工作实际上就是在硬件上模拟多个虚拟计算机 。Hypervisor 上执行着 GuestOS ,再上面是应用程序 。
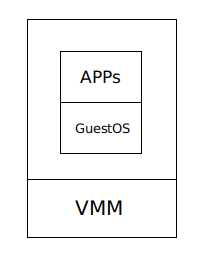
Hypervisor 即 virtual machine monitor ( VMM )
GuestOS 即运行在虚拟机中的操作系统,与之对应的是 HostOS ,指物理机里的操作系统 。
在物理机上确保确定性执行是困难的,因为其会接收到很多不确定输入( 如定时器中断 ),因此可以采用虚拟机,Hypervisor 对硬件进行模拟和控制,可以捕获到这些不确定输入的所有相关信息,使得 backup 可以重放这些不确定输入 。
因为我们讨论的故障主要是指服务器故障,因此不同的虚拟机要位于不同的物理机上,否则便失去了容错的意义 。
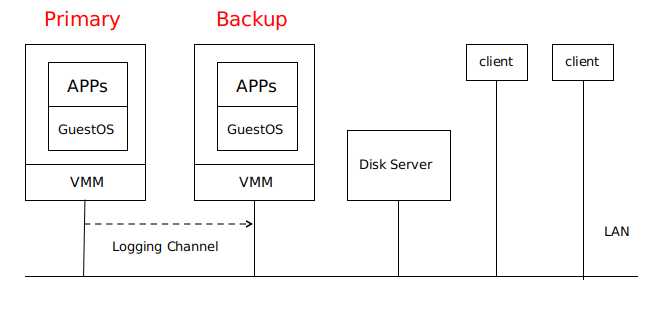
Primary VM 和 Backup VM 运行在同一网络环境中的不同物理机上,两者可以访问同一个 Disk Server ,即论文当中的 Shared Disk 。
只有 Primary VM 向外界通知自己的存在,因此所有网络输入或其他输入(磁盘、鼠标、键盘)都进入 Primary VM 。
Primary VM 接收的所有输入都通一个称为 Logging Channel 的网络连接发送到 Backup VM ,以保证两者状态相同 。Backup VM 的指令执行结果与 Primary VM 的结果相同,但只有 Primary VM 返回给 client 结果,Backup VM 的结果会被 Hypervisor 丢弃 。
系统使用 Primary VM 和 Backup VM 之间的心跳包和 Logging Channel 上的流量监控来检测 Primary VM 或 Backup VM 是否是失效 。此外,必须确保 Primary VM 和 Backup VM 中只有一个接管执行 。
事实证明,这些主备虚拟机并不适用于本地磁盘,而是会和某些磁盘服务器进行通信。( 论文中并未提到这点 )
由上文可知,VM-FT 建模为确定性状态机的复制 。对于一系列输入,对 primary 的执行进行记录并确保 backup 以相同方式执行的基本技术称为 确定性重放 。
primary 的操作中包含了 确定性操作 和 不确定性操作 。确定性操作在 primary 和 backup 上的执行结果是相同的,不确定性操作包括:
前两种不确定性操作会在 Logging Channel 中传送
确定性重放记录 primary 的输入和 primary 执行相关的所有可能的不确定性,记录在 log entry 流中,发送给 backup 并使其重放 :
log entry 中应该包含了:
不确定性指令执行过程:
( 即使 primary 和 backup 在同一状态,执行不确定性指令后也会产生不同结果 )
primary:
- Hypervisor 在 primary 执行指令时设置中断
- Hypervisor 执行指令并记录结果
- 发送结果和指令序号到 backup
backup:
- Hypervisor 读 log entry ,在该指令序号处设置中断
- Hypervisor 应用从 primary 执行得到的结果,自己产生的结果被丢弃,从而保证主备一致
输出要求:若 primary 发生故障后且 backup 接管后,backup 必须以一种与原 primary 已发送到外部的输出完全一致的方式运行 。
只要满足了输出要求,故障转移就不会丢失外部可见的状态或数据,client 也不会注意到 server 服务中断或有不一致 。
可能有一种特殊情况会发生:如果 primary 在执行输出操作后立即故障,backup 在完成接管之前,可能还未执行到同样的输出操作,就被其他不确定事件所影响( 如计时中断 ),这样 backup 就无法以与 primary 发生故障时的相同状态上线,为此提出了 输出规则 。
输出规则:primary 必须延后将输出发送到外部世界的动作,直到 backup 已经接收并确认 与产生该输出的操作相关 的 log entry 。
基于输出规则,primary 和 backup 的交互如下图所示:
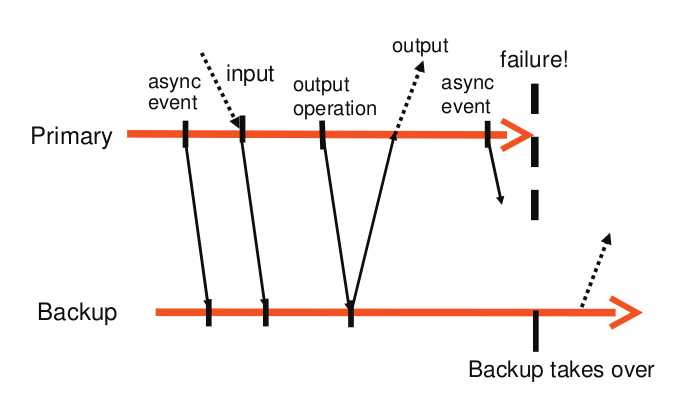
primary 等待来自 backup 的 ACK 时,不会停止执行,只需要延迟输出的发送 ( 异步执行 )。
一些故障发生情况:
如果 primary 在收到 ACK 之前故障,它不会返回结果给 client ,由于 backup 的输出会被丢弃,所以两者在 client 看来是一致的,即未收到 server 回复 。
如果 primary 在发送输出后故障,backup 在接管后也执行发送,client 会收到两次输出 。但是这种情况不会造成不良后果,因为对于 TCP 连接来说,它会处理重复的数据包;对于磁盘来说,会对同一块存储区覆盖写入 。
两种 VM 都有可能发生故障:
VM-FT 检测故障的方式有 UDP 心跳检测和监控 logging channel 中的流量以及 backup 发送给 primary 的 ACK 。若心跳或日志流量停止的时间超过了特定超时时间( 大约几秒 ),就会声明故障 。
这样的故障检测方法,在有网络故障时,容易遇到 split-brain 问题:即 primary 和 backup 之间通信断开,但此时 primary 还在运行,若 backup 此时上线,会造成两者同时执行的问题,可能会导致数据损坏 。
为解决 split-brain 问题,使 Disk Server 支持 atomic test-and-set 测试,即在 Disk Server 上维护一个 flag ,第一个访问此 flag 的 VM 会成为 primary ,第二个访问此 flag 的 VM 不会上线 。( 类似于锁 )
primary 发生故障,backup 上线时,在新的物理机上建立 backup ,恢复冗余,继续进入到容错状态 。
VM vSephere 实现了一个集群服务,用于维护管理和资源信息。当发生故障时,集群服务根据资源使用情况和其他约束来确定新的 backup 的最佳服务器,并将其复制成为 backup 。其结果是,VM-FT 通常可以在服务器发生故障后几分钟内重新建立冗余,而在执行容错转移时不会产生任何明显的中断 。
Hypervisor 为 primary 和 backup 分别维护了一个 log buffer ,如下图所示:
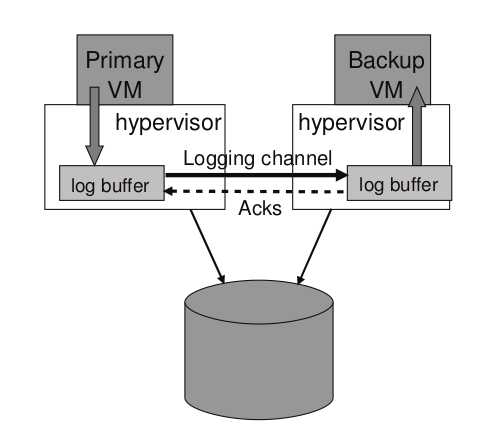
若 primary 的 log buffer 已满,primary 会等待;若 backup 的 log buffer 已空,backup 会等待 。
另外,为了防止 backup 的重放落后太多,在发送和确认 log entry 的协议中,会发送附加信息来确定 primary 和 backup 之间的 实时执行延迟 ,通常小于 100ms 。若 backup 出现明显的延迟,VM-FT 会通知调度器给它分配更少的 CPU 资源,从而降低 primary 的速度;若 backup 追起来了,逐渐增加 primary 的速度 。
磁盘操作可能和 VM 中的应用程序或 OS 存在内存访问竞争 。
这种竞争在网络数据包或磁盘块到达 primary 时产生 。在没有 VM-FT 的情况下,相关硬件会通过 DMA 将该数据复制到内存中 。若 APP/OS 也在同时读取这块内存。那么对于 primary 和 backup ,由于时间上的微小差异,可能一个在 DMA 之前读取,一个在 DMA 之后读取,就导致了不一致 。
解决方法是使用 bounce buffer ,它的大小与磁盘操作访问的内存大小相同 。primary 的 Hypervisor 首先复制网络数据或磁盘块到 bounce buffer ,此时 primary 无法访问它 ,Hyperbisor 中断 primary 使其暂停执行,并记录中断的指令 。然后 Hypervisor 将 bounce buffer 中的内容复制到 primary 的内存 ,并让其继续执行 。通过 logging channel 将数据送到 backup 之后,backup 的 Hypervisor 在相同指令处中断 backup ,将数据复制到 backup 的内存后,最后恢复 backup 的执行 。
机器级复制 即复制了内存中和寄存器中的所有内容 。优点为可以在 VM-FT 上运行任何软件;缺点为不够高效
应用级复制 即 primary 仅发送 high-level 操作给 backup 。如数据库,同步的状态仅为数据库内容,不是所有的内存内容,操作仅为数据库命令( get 、put 之类 ),没有网络包或中断 。GFS 使用的也是应用级复制 。
优点:更少的细粒度同步、更低的开销
缺点:应用程序必须理解系统的容灾
VM-FT 备份的是 计算,可以用它为任何已有的网络服务器提供容错性。VM-FT 提供了相当严谨的一致性而且对 client 和 server 都是透明的。例如,你可以利用 VM-FT 为已有的邮件服务器提供容错性。
相比之下,GFS 只为 存储 提供容错性。因为 GFS 只针对一种简单的服务提供容错性,它的备份策略会比 VM-FT 更为高效:例如,GFS 不需要使中断发生在所有的副本的同一指令上。GFS 通常只会被用作一个对外提供完整容错服务的系统的一部分:例如,VM-FT 本身也依赖了一个在主备虚拟机间共享的有容错性的存储服务,而你则可以用类似于 GFS 的东西来实现这个模块( 虽然从细节上来讲 GFS 不太适用于 FT )。
《The Design of a Practical System for Fault-Tolerant Virtual Machines》论文研读
标签:硬件 就是 erb 状态 put 接管 连接 replicate load
原文地址:https://www.cnblogs.com/brianleelxt/p/13245754.html