标签:turn col oat nts 组成 abs spl img python实现
首先让我们先了解一下颜色矩是什么,以下是颜色矩的定义及数学表达,看着唬人但其实并不难。
颜色矩是一种简单有效的颜色特征表示方法,有一阶矩(也就是均值,mean)、二阶矩(也就是标准差, variance)和三阶矩(斜度,skewness)等,由于颜色信息主要分布于低阶矩中,所以用一阶矩,二阶矩和三阶矩足以表达图像的颜色分布,颜色矩已证明可有效地表示图像中的颜色分布。
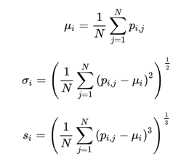
其中,Pij 表示彩色图像第j个像素的第i个颜色分量,N表示图像中的像素个数。

HSV 中心距法是基于HSV空间的,因此需要将RGB空间转换为HSV空间。
def color_moments(filename): img = cv2.imread(filename) # 读一张彩色图片 if img is None: return hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV) # RGB空间转换为HSV空间 h, s, v = cv2.split(hsv) color_feature = [] # 初始化颜色特征 # 一阶矩(均值 mean) h_mean = np.mean(h) # np.sum(h)/float(N) s_mean = np.mean(s) # np.sum(s)/float(N) v_mean = np.mean(v) # np.sum(v)/float(N) color_feature.extend([h_mean, s_mean, v_mean]) # 一阶矩放入特征数组 # 二阶矩 (标准差 std) h_std = np.std(h) # np.sqrt(np.mean(abs(h - h.mean())**2)) s_std = np.std(s) # np.sqrt(np.mean(abs(s - s.mean())**2)) v_std = np.std(v) # np.sqrt(np.mean(abs(v - v.mean())**2)) color_feature.extend([h_std, s_std, v_std]) # 二阶矩放入特征数组 # 三阶矩 (斜度 skewness) h_skewness = np.mean(abs(h - h.mean()) ** 3) s_skewness = np.mean(abs(s - s.mean()) ** 3) v_skewness = np.mean(abs(v - v.mean()) ** 3) h_thirdMoment = h_skewness ** (1. / 3) s_thirdMoment = s_skewness ** (1. / 3) v_thirdMoment = v_skewness ** (1. / 3) color_feature.extend([h_thirdMoment, s_thirdMoment, v_thirdMoment]) # 三阶矩放入特征数组 return color_feature
Python图片颜色特征提取——HSV中心距法(附代码及注释)
标签:turn col oat nts 组成 abs spl img python实现
原文地址:https://www.cnblogs.com/bridge0904/p/13255917.html