标签:top wait tar ioctl 上下 补丁 操作 size_t pes
原创 宋宝华 Linux阅码场 5月6日本文原文地址:
https://devarea.com/understanding-linux-kernel-preemption/#.XrKLcfnx05k
作者:Liran B.H
译者:宋宝华
当配置Linux内核的时候,我们可以选择一些参数,这些参数能影响系统的行为。你可以用不同的优先级、调度类和抢占模型来工作。正确地选择这些参数是非常重要的。
本文将论述不同的抢占模型如何影响用户和系统的行为。
当你使用 make menuconfig配置内核的时候,你能看到这样的菜单: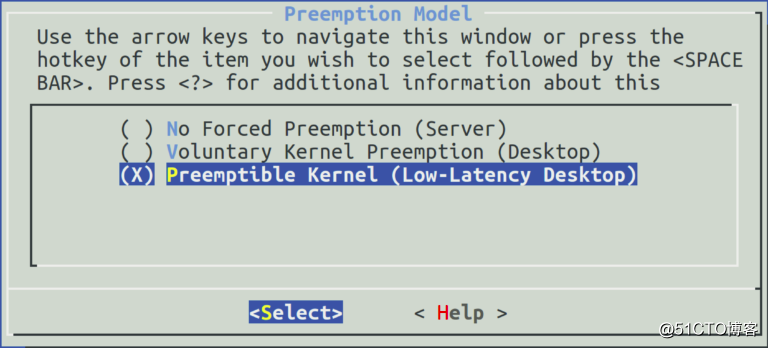
为了深入理解这三个抢占模型的区别,我们将写一个案例:
这种情况下,上下文切换发生在系统调用返回用户空间的点。案例如下:
1 #include <asm/uaccess.h>
2 #include <linux/fs.h>
3 #include <linux/gfp.h>
4 #include <linux/cdev.h>
5 #include <linux/sched.h>
6 #include <linux/kdev_t.h>
7 #include <linux/delay.h>
8 #include <linux/ioctl.h>
9 #include <linux/slab.h>
10 #include <linux/mempool.h>
11 #include <linux/mm.h>
12 #include <asm/io.h>
13
14
15 static dev_t my_dev;
16 static struct cdev *my_cdev;
17
18
19 // callback for read system call on the device
20 static ssize_t my_read(struct file *file, char __user *buf,size_t count,loff_t *ppos)
21 {
22 int len=5;
23 if(*ppos > 0)
24 {
25 return 0;
26 }
27 mdelay(5000); // busy-wait for 5 seconds
28 if (copy_to_user(buf , "hello" , len)) {
29 return -EFAULT;
30 } else {
31 *ppos +=len;
32 return len;
33 }
34 }
35
36
37
38 static struct file_operations my_fops =
39 {
40 .owner = THIS_MODULE,
41 .read = my_read,
42 };
43
44
45
46
47 static int hello_init (void)
48 {
49
50 my_dev = MKDEV(400,0);
51 register_chrdev_region(my_dev,1,"demo");
52
53 my_cdev=cdev_alloc();
54 if(!my_cdev)
55 {
56 printk (KERN_INFO "cdev alloc error.\n");
57 return -1;
58 }
59 my_cdev->ops = &my_fops;
60 my_cdev->owner = THIS_MODULE;
61
62 if(cdev_add(my_cdev,my_dev,1))
63 {
64 printk (KERN_INFO "cdev add error.\n");
65 return -1;
66 }
67
68
69 return 0;
70
71 }
72
73
74 static void
75 hello_cleanup (void)
76 {
77 cdev_del(my_cdev);
78 unregister_chrdev_region(my_dev, 1);
79 }
80
81
82 module_init (hello_init);
83 module_exit (hello_cleanup);
84 MODULE_LICENSE("GPL")读里面delay了5秒, 注意mdelay是一个计算型的busy-loop。
用户空间代码如下:
1. #include<stdio.h>
2 #include<unistd.h>
3 #include<pthread.h>
4 #include <sys/types.h>
5 #include <sys/stat.h>
6 #include <fcntl.h>
7
8
9 void *hi_prio(void *p)
10 {
11 printf("thread1 start time=%ld\n",time(NULL));
12 sleep(3);
13 printf("thread1 stop time=%ld\n",time(NULL));
14 return NULL;
15 }
16
17 void *low_prio(void *p)
18 {
19 char buf[20];
20 sleep(1);
21 int fd=open("/dev/demo",O_RDWR); // #mknod /dev/demo c 400 0
22 puts("thread2 start");
23 read(fd,buf,20);
24 puts("thread2 stop");
25 return NULL;
26 }
27
28
29 int main()
30 {
31 pthread_t t1,t2,t3;
32
33 pthread_attr_t attr;
34
35 struct sched_param param;
36
37 pthread_attr_init(&attr);
38 pthread_attr_setschedpolicy(&attr, SCHED_RR);
39
40 param.sched_priority = 50;
41 pthread_attr_setschedparam(&attr, ¶m);
42
43
44 pthread_create(&t1,&attr,hi_prio,NULL);
45
46 param.sched_priority = 30;
47 pthread_attr_setschedparam(&attr, ¶m);
48
49 pthread_create(&t2,&attr,low_prio,NULL);
50 sleep(10);
51 puts("end test");
52 return 0;
53 }实验步骤:
1 # insmod demo.ko
2 # ./app
3 thread1 start time=182
4 thread2 start
5 thread1 stop time=188
6 thread2 stop
7 end test这种情况内核里面也可以抢占,意味着上述程序里面的高优先级线程3秒后可醒来。
这种情况下,系统会有更多的上下文切换,但是实时性更加好。对于要求软实时的嵌入式系统而言,这个选项是最佳的。但是对于服务器而言,通常第一个选项更好——更少的上下文切换,更多的CPU时间用作有用功。
运行结果(stop、start时间差3秒):
1 # insmod ./demo.ko
2 #./app
3 thread1 start time=234
4 thread2 start
5 thread1 stop time=237
6 thread2 stop
7 end test这种情况和第一种情况"no forced preemption"类似,但是内核开发者可以在进行复杂操作的时候,时不时检查一下是否可以reschedule。他们可以调用might_resched()函数。
在下面的代码中,我们添加了一些检查点(check point)
1 // callback for read system call on the device
2 static ssize_t my_read(struct file *file, char __user *buf,size_t
3 {
4 int len=5;
5 if(*ppos > 0)
6 {
7 return 0;
8 }
9 mdelay(4000); // busy-wait for 4 seconds
10 might_resched();
11 delay(3000); // busy wait for 3 seconds
12 if (copy_to_user(buf , "hello" , len)) {
13 return -EFAULT;
14 } else {
15 *ppos +=len;
16 return len;
17 }
18 }如果我们把might_resched()注释掉,它会delay 7秒。
添加cond_resched()调用将导致系统检查是否有高优先级的任务被唤醒,这样高优先级任务5秒可以醒来(其中1秒在systemcall之前,另外4秒在kernel)。
运行结果:
1 # insmod ./demo.ko
2 #./app
3 thread1 start time=320
4 thread2 start
5 thread1 stop time=325
6 thread2 stop
7 end test如果我们使能RT补丁,我们会得到一个硬实时的kernel。这意味着任何代码可以抢占任何人。比如一个更加紧急的任务可以抢占中断服务程序ISR。这个patch进行了如下改动:
打补丁后会看到2个新增的菜单: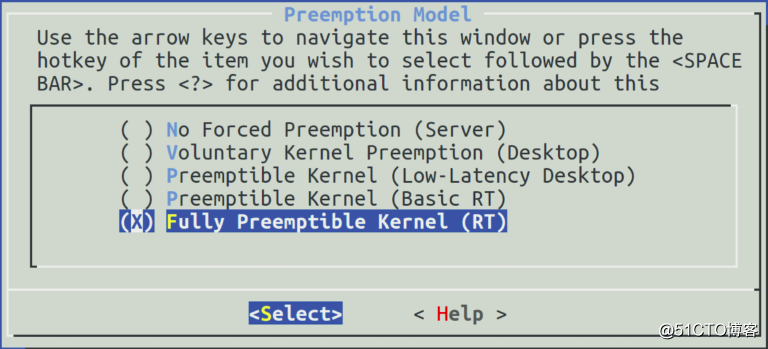
其中 “Preemptible Kernel (Basic RT)” 是为了调试目的的,为了全面使用RT补丁的功能,我们应该选择最后一项 – Fully Preemptible Kernel。这样我们会有更多的上下文切换,但是可以满足RT的实时要求。
(END)
标签:top wait tar ioctl 上下 补丁 操作 size_t pes
原文地址:https://blog.51cto.com/15015138/2555196