标签:尺寸 ret add range read padding numpy cli 代码实现
平滑滤波与边缘检测是图像处理中非常基础与重要的部分。平滑滤波器主要有均值滤波,中值滤波,高斯滤波与双边滤波等,边缘检测主要有Sobel算子,Laplace算子,Canny算子等。本文主要就高斯滤波与Sobel算子进行原理上的介绍,并用Python进行实现。
高斯滤波是一种线性滤波器,能够较好地平滑与抑制图像噪声,与均值中值滤波一样,高斯滤波也是对图像像素进行平均的一个过程,但不同的一点是,高斯滤波对图像像素进行的是加权平均,每一个像素点的值,都有其邻域内的其他像素点灰度值加权平均得到。在图像处理领域的高斯滤波其本质上是一种高通滤波器,过滤掉图像中的细节部分(高频部分),保留图像中的平滑部分(低频部分)。
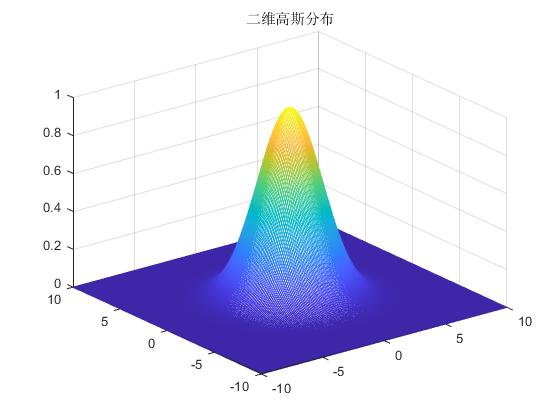
正如上文说的,高斯滤波处理在图像上反映出来的是一个加权平均的过程,距离中心点越近的部分,其权重越大,反之越小,而权值的分布,则符合正态分布,对于一个二维图像来说,则符合二维高斯分布。
一维高斯函数:
二维高斯函数:
二维高斯函数的图像为:
为了下一步讨论高斯滤波的实现过程,我们首先要介绍一下图像处理中的卷积是如果工作和实现的。与信号处理中的卷积实现方法不同,在图像处理中的卷积主要通过模板矩阵与图像矩阵相乘,得到新的结果矩阵。下图详细演示了图像卷积的过程:
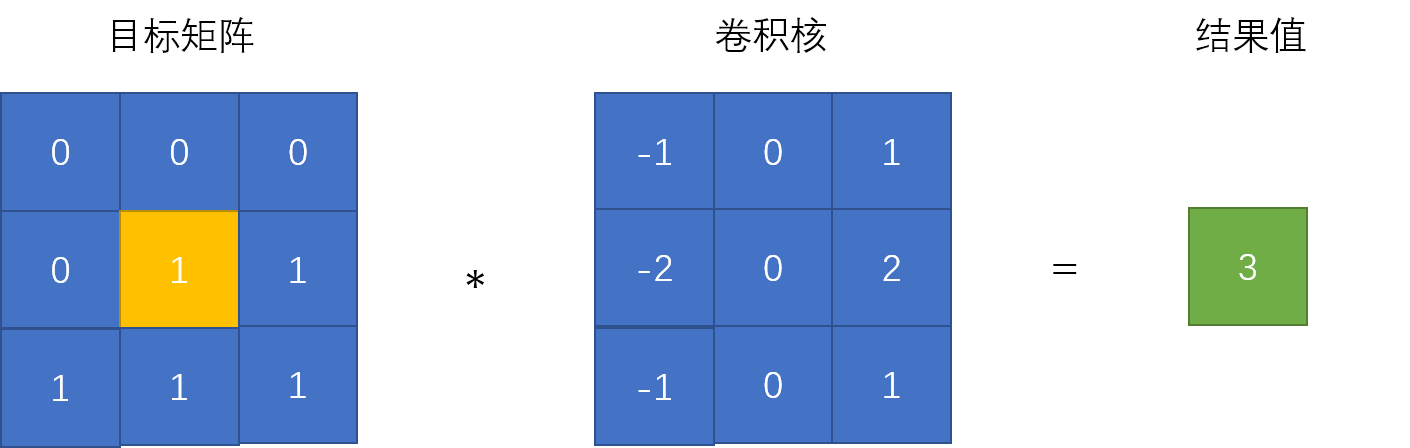
在上图中,黄色标识的像素标识我们要卷积的目标像素,绿色为经过卷积核得出的结果像素值,其运算过程为:
在实际操作中,我们需要对图像的边缘进行补偿,以便卷积核可以对图像边缘部分的像素进行计算。我们常用的边缘补偿方法有以下几种:
在本代码中,我们用补0的方式来进行处理。
根据上文对图像处理卷积的理解,我们可以认为高斯卷积也是一个符合高斯分布的卷积核,在本实例中,我们使用的卷积核大小为\(3\times 3\)。
如上文所述,在卷积处理开始之前,要对边缘进行补偿,我们这里使用全0补偿法,代码如下:
def padding(image,ksize):# 输入目标图像,卷积核大小
h = image.shape[0] # 获取图像尺寸
w = image.shape[1]
c = image.shape[2]
pad = ksize // 2 # 需要补偿的边缘大小
out_p = np.zeros((h+2*pad,w+2*pad,c)) # 创造一个补偿后大小的全0矩阵
out_copy = image.copy()
out_p[pad:pad+h,pad:pad+w,0:c] = out_copy.astype(np.uint8) # 将原图像复制入目标图像中
return out_p
下来是构建高斯卷积核,根据上图中的二维高斯函数公式,我们的代码为:
# 高斯卷积核
kernel = np.zeros((ksize,ksize)) # 创建一个卷积核大小的全0二维矩阵
for x in range(-pad,-pad+ksize):
for y in range(-pad,-pad+ksize):
kernel[y+pad,x+pad] = np.exp(-(x**2+y**2)/(2*(sigma**2))) # 给卷积核内赋值
kernel /= (sigma*np.sqrt(2*np.pi)) # 计算平均值
kernel /= kernel.sum() # 加总
要注意的是,高斯方程中有一个很重要的参数就是\(sigma\)值,在本示例中,如果未指定确定值,则\(sigma\)由下面的公式自动确定:
其中ksize为高斯卷积核大小(本例中为\(3\),即高斯卷积核为\(3\times 3\))。
最后,再根据图像中卷积的定义,对目标进行高斯卷积。
整个过程的完整代码如下:
import numpy as np
from PIL import Image
from cv2 import cv2
import matplotlib.pyplot as plt
import math
def padding(image,ksize):
h = image.shape[0]
w = image.shape[1]
c = image.shape[2]
pad = ksize // 2
out_p = np.zeros((h+2*pad,w+2*pad,c))
out_copy = image.copy()
out_p[pad:pad+h,pad:pad+w,0:c] = out_copy.astype(np.uint8)
return out_p
def gaussian(image,ksize,sigma):
"""
1. padding
2. 定义高斯滤波公式与卷积核
3. 卷积过程
高斯卷积卷积核是按照二维高斯分布规律产生的,公式为:
G(x,y) = (1/(2*pi*(sigma)^2))*e^(-(x^2+y^2)/2*sigma^2)
唯一的未知量是sigma,在未指定sigma的前提下,可以通过下列参考公式让程序自动选择合适的
sigma值:
sigma = 0.3 *((ksize-1)*0.5-1) + 0.8
@ 如果mode为default,则返回abs值,否则返回unit8值
"""
pad = ksize//2
out_p = padding(image,ksize) # padding之后的图像
# print(out_p)
h = image.shape[0]
w = image.shape[1]
c = image.shape[2]
# 高斯卷积核
kernel = np.zeros((ksize,ksize))
for x in range(-pad,-pad+ksize):
for y in range(-pad,-pad+ksize):
kernel[y+pad,x+pad] = np.exp(-(x**2+y**2)/(2*(sigma**2)))
kernel /= (sigma*np.sqrt(2*np.pi))
kernel /= kernel.sum()
# print(kernel)
tmp = out_p.copy()
# print(tmp)
for y in range(h):
for x in range(w):
for z in range(c):
out_p[pad+y,pad+x,z] = np.sum(kernel*tmp[y:y+ksize,x:x+ksize,z])
out = out_p[pad:pad+h,pad:pad+w].astype(np.uint8)
# print(out)
return out
if __name__ == "__main__":
path = "../bilder/lena.png"
img = cv2.imread(path)
gaussian_img = gaussian(img,3,0.8)
cv2.imshow(‘Original Image‘,img)
cv2.imshow(‘Gaussian Image‘,gaussian_img)
cv2.waitkey()
我们用图像处理中著名的"lena"图来进行结果展示。


通过结果我们可以看出,高斯图像相比原图更加平滑,比如头发上的细节,经过高斯处理后,平滑了许多,如果想要更多的效果,可以通过增大sigma值来实现。
Sobel算子是非常常用的边缘检测算子,那么,既然是边缘检测,首先就需要了解什么是边缘。
何为边缘?
我们人眼可以非常容易的分辨哪里是边缘哪里不是,但对于计算机来说,则没有那么容易。因为对于程序来说,一个灰度图像的本质是一个二维矩阵,矩阵中的每一个值对应的是图像每一个像素点的灰度值。那么,对于边缘来说,就是灰度变化最激烈的地方,换句话说,就是灰度梯度值最大的点,因为梯度就代表了变化程度。
Sobel算子也是一种加权算子,主要思想在于,各个像素对中心像素点的影响不是等价的,会随着距离的不同而不同。Sobel分别在x和y两个方向上对像素进行求导。
在本例实现的代码中,我们定义了一个参数operator_type来确定是进行x还是y方向上的求导。如果operator_type = ‘horizontal‘则是x方向,operator_type = ‘Vertical‘则是y方向。不同求导方向对于不同方向上边缘的敏感性不同,具体的区别会在后面的结果清楚的呈现。
def sobel(image,operator_type,mode):
if operator_type == "horizontal": # 定义求导方向
sobel = np.array([[-1,-2,-1],[0,0,0],[1,2,1]])
elif operator_type == "vertical":
sobel = np.array([[-1,0,1],[-2,0,2],[-1,0,1]])
else:
print("type error") # 如果未定义,则输出错误提醒
h = image.shape[0]
w = image.shape[1]
c = image.shape[2]
out_p = padding(image,ksize=3)# padding,边缘补偿
tmp = out_p.copy()
for y in range(h):
for x in range(w):
for z in range(c):
if mode == ‘default‘: # 为后面的canny算子进行准备,默认对结果像素取绝对值。
out_p[1+y,1+x,z] = abs(np.sum(sobel*tmp[y:y+3,x:x+3,z]))
else:
out_p[1+y,1+x,z] = np.sum(sobel*tmp[y:y+3,x:x+3,z])
out = out_p[1:1+h,1:1+w].astype(np.uint8)
out = out.clip(0,255) # 裁剪像素,将结果像素值限定在0-255范围内。
if mode == "default": # 设定阈值,当前阈值设定为70
threshold = 70
for i in range(h):
for j in range(w):
for z in range(c):
if out[i,j,z] < threshold:
out[i,j,z] = 0
# print(out)
return out
下面是Sobel在不同方向上的运行结果。
原图

x方向上的结果
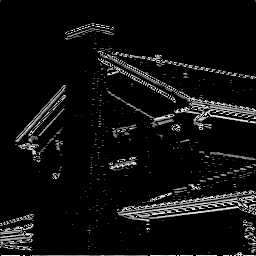
y方向上的结果

我们可以清楚的看出来求导方向对检测结果的影响,在Sobel算子上,不同方向的运算对方向上边缘的检测效果有很大的差别。但很多时候我们需要检测的是整个图像的所有边缘而非特定方向的边缘,这时候我们就可以用Canny算子,在下一篇博客我会进行Canny算子的相关介绍和实现。
以上就是Python对传统方法图像处理中高斯平滑与Sobel算子的原理介绍与代码实现,代码其实还有很大的优化空间。
标签:尺寸 ret add range read padding numpy cli 代码实现
原文地址:https://www.cnblogs.com/AsukaYan/p/14713878.html