标签:style blog http io color os 使用 sp for
1843年,William Rowan Hamilton发明了四元数,但直到1985年才有一个叫Ken Shoemake的人将四元数引入计算机图形学处理领域。四元数在3D图形学中主要用于旋转,骨骼动画等。
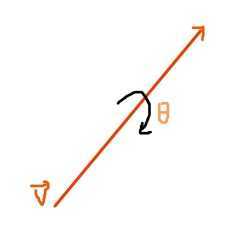
简单地来说,四元数描述了一次旋转:绕任意一个轴(V)旋转一个弧度(θ)。
那么四元数q就与(V,θ)两个参数有关。
具体公式:
q = (sin(θ / 2) * V,cos(θ / 2) )
q = (sin(θ / 2) * x,sin(θ / 2) * y,sin(θ / 2) * z,cos(θ / 2))
// float radians = 90 / 360f * Mathf.PI * 2; // Vector3 n = Vector3.up; // float w = Mathf.Cos (radians / 2); // float s = Mathf.Sin (radians / 2); // float x = n.x * s; float y = n.y * s; float z = n.z * s; // transform.rotation = new Quaternion (x, y, z, w);
上述代码,可以设置一个游戏对象沿着Y轴向上的方向顺时针旋转90度
Set用法
// float radians = degress / 360f * Mathf.PI * 2; // Vector3 n = Vector3.up; // float w = Mathf.Cos (radians / 2); // float s = Mathf.Sin (radians / 2); // float x = n.x * s; float y = n.y * s; float z = n.z * s; // Quaternion q = new Quaternion (); q.Set (x, y, z, w); // transform.rotation = q;
SetFromRatation用法
// Quaternion q = new Quaternion (); q.SetFromToRotation (Vector3.up, Vector3.left); // transform.rotation = q;
SetLookRotation用法
// Quaternion q = new Quaternion (); q.SetLookRotation (Vector3.back); // transform.rotation = q;
// transform.rotation = Quaternion.identity; // transform.rotation = Quaternion.AngleAxis (degress, Vector3.up); // transform.rotation = Quaternion.Dot (q1, q2); // transform.rotation = Quaternion.Inverse (q1); // transform.rotation = Quaternion.Lerp(q1,q2,Time.deltaTime); // transform.rotation = Quaternion.Slerp (q1, q2, Time.deltaTime);
[Unity Quaternion]四元数Quaternion的计算方式
标签:style blog http io color os 使用 sp for
原文地址:http://www.cnblogs.com/daxiaxiaohao/p/4111301.html