标签:style blog http io ar color os 使用 sp
Kinect v2,Microphone Array可以用来对于水平面音源方向的推测(AudioBeam)和语音识别(Speech Recognition)。这一节是介绍如何取得AudioBeam。
上一节,介绍如何使用通过Kinect SDK v2预览版,从Kinect v2预览版的Color Camera和Depth 传感器中获取数据的方法。
本节,将介绍从Kinect的Microphone Array中取得AudioBeam(水平面音源方向的推测)的方法。
Microphone Array
在第一节中介绍过,Kinect除搭载了Color Camera,Depth传感器之外,还有Microphone Array。
Microphone Array由4个Microphone构成,能进行水平面音源方向的推测(AudioBeam)和语音识别(Speech Recognition)等。
这一节,将介绍取得AudioBeam的方法。
 图1 Kinect v2预览版的Microphone Array
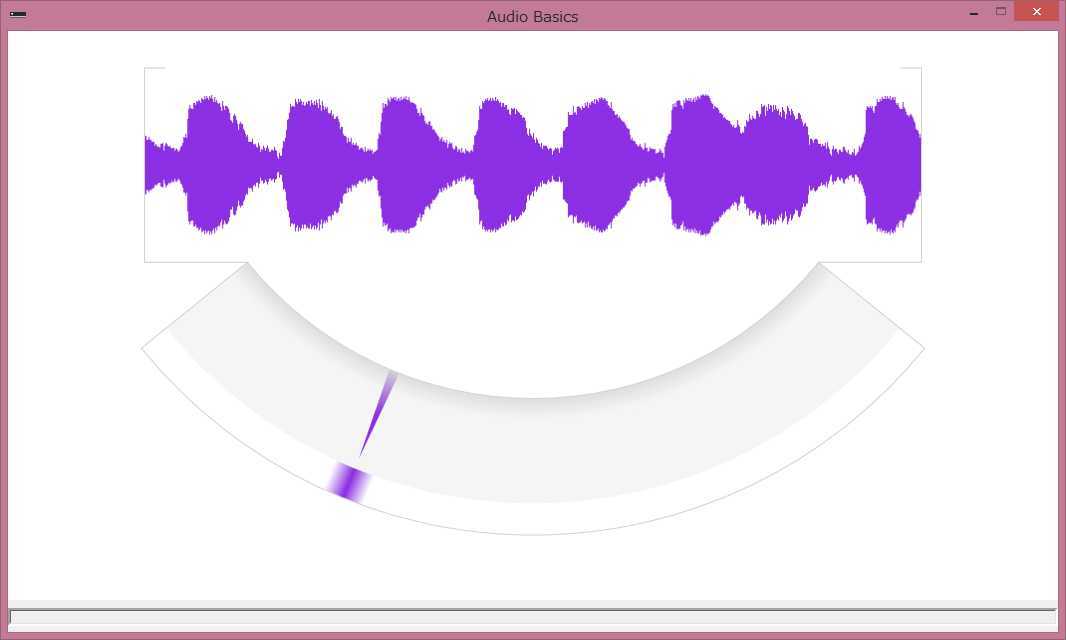
图1 Kinect v2预览版的Microphone Array图2 Kinect SDK v2预览版的示例程序(AudioBasics)
示例程序
用Kinect SDK v2取得AudioBeam,将结果显示在console上的示例程序。
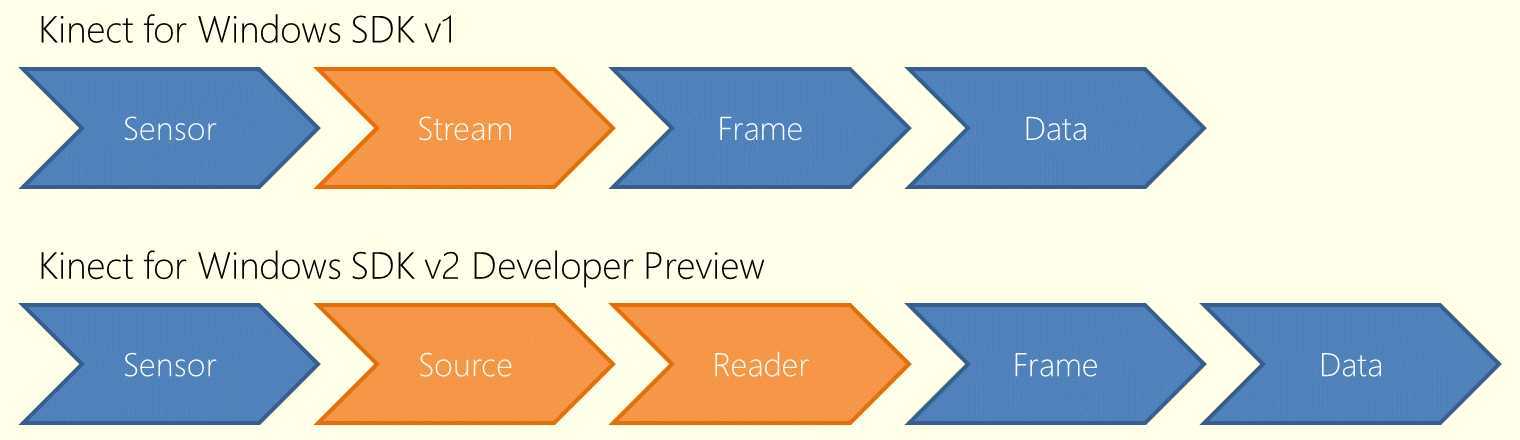
Audio的功能(AudioBeam,Speech Recognition)的数据取得流程,在「Sensor」~「Source」这一块与之前的Image(Color,Depth,BodyIndex,Body)的取得流程一样。不过在这之后还请注意Audio功能所特有的部分,这里主要是介绍与Image所同样的数据取得流程。
这个示例程序的全部内容,在下面的github里全部公开了。
图3 Kinect SDK v2预览版的数据取得的流程(重发)
「Sensor」
取得「Sensor」
// Sensor
IKinectSensor* pSensor; // ……1
HRESULT hResult = S_OK;
hResult = GetDefaultKinectSensor( &pSensor ); //……2
if( FAILED( hResult ) ){
std::cerr << "Error : GetDefaultKinectSensor" << std::endl;
return -1;
}
hResult = pSensor->Open(); //……3
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::Open()" << std::endl;
return -1;
}
列表1.1 相当于图1「Sensor」的部分(重发)
1 处理Kinect v2预览版的Sensor接口。
2 取得默认的Sensor。
3 打开Sensor。
「Source」
从「Sensor」取得「Source」。
// Source
IAudioSource* pAudioSource; //……1
hResult = pSensor->get_AudioSource( &pAudioSource ); //……2
if( FAILED( hResult ) ){
std::cerr << "Error : IKinectSensor::get_AudioSource()" << std::endl;
return -1;
}
列表1.2 相当于图1「Source」的部分
1 Audio功能的Source接口。
2 从Sensor取得Source。
「AudioBeamList」~「OpenAudioBeam」
从「Source」取得「AudioBeamList」,从List里打开指定的「AudioBeam」。
// Get Audio Beam List
IAudioBeamList* pAudioBeamList; //……1
hResult = pAudioSource->get_AudioBeams( &pAudioBeamList ); //……2
if( FAILED( hResult ) ){
std::cerr << "Error : IAudioSource::get_AudioBeams()" << std::endl;
return -1;
}
// Open Audio Beam
IAudioBeam* pAudioBeam; //……3
hResult = pAudioBeamList->OpenAudioBeam( 0, &pAudioBeam ); //……4
if( FAILED( hResult ) ){
std::cerr << "Error : IAudioBeamList::OpenAudioBeam()" << std::endl;
return -1;
}
列表1.3 取得Microphone Array和AudioBeam
1 AudioBeamList接口。
2 从Source取得AudioBeam,然后取得Microphone Array的List。
3 AudioBeam接口。
4 从List里取得AudioBeam,打开Microphone Array。
0代表第一个被找到的默认的Microphone Array。
「Get Angle and Confidence」
从「Stream」读入Audio数据,取得音源方向和推测的信赖值。
while( 1 ){
// Get Angle and Confidence
FLOAT angle = 0.0f;
FLOAT confidence = 0.0f;
pAudioBeam->get_BeamAngle( &angle ); // radian [-0.872665f, 0.872665f] ……1
pAudioBeam->get_BeamAngleConfidence( &confidence ); // confidence [0.0f, 1.0f] ……2
// Show Result
// Convert from radian to degree : degree = radian * 180 / Pi
if( confidence > 0.5f ){
std::system( "cls" );
std::cout << "Angle : " << angle * 180.0f / M_PI << ", Confidence : " << confidence << std::endl; //……3
}
// Input Key ( Exit ESC key )
if( GetKeyState( VK_ESCAPE ) < 0 ){
break;
}
}
列表1.5 取得音源方向和推测的信赖值
1 取得音源方向。
角度单位是radian(弧度)。
2 取得音源方向的推测信赖值。
取值范围是0.0f~1.0f,数值越大表示可信度更高。
3 把radian(弧度)转为dgree(度数)在Console上输出。
只显示当前的数值,如果注释掉「std::system("cls");」的话,那么之前的值也会留在Cconsole上。
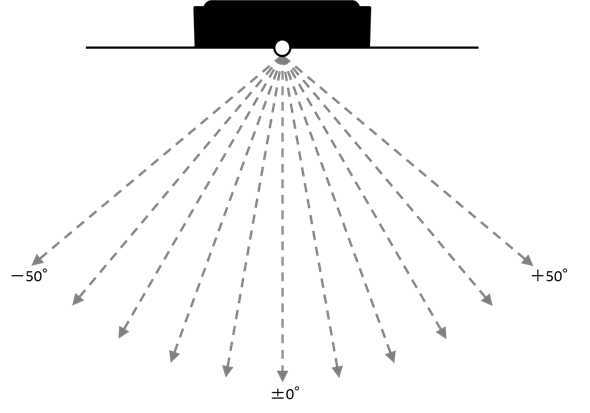
可以取得的音源方向是Kinect v2的中心正面向水平方向左右+/-50°的范围。
图4 音源方向的检测范围(+/-50°)
因为取得的音源方向的角度单位是「radian(弧度)」要利用公式1转换为「degree(度数)」。
【公式1 adian(弧度)转换为(度数)】
- 弧度(radian)→角度(degree)∶ degree=radian×180÷π
- 角度(degree)→弧度(radian)∶ radian=degree×π÷180
运行结果
运行这个示例程序,就像图5一样,将显示出声音的音源角度(Angle)和推测的信赖值(Confidence)。
如果Microphone Array的反应过度敏感或迟钝,可以通过调整操作系统的录音设备属性来改善(在[控制面板]-[声音]-[录制]的录音设备中的「麦克排列Xbox NUI Sensor」的属性里调整等级)。
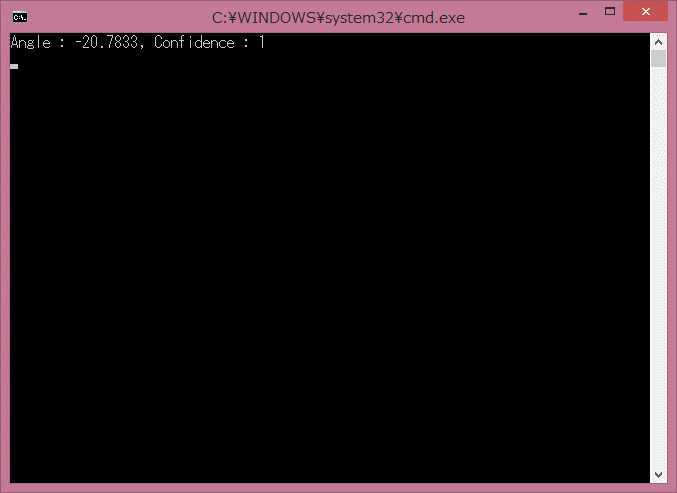 图5 运行结果
图5 运行结果
在Console上显示了音源方向的角度和推测的信赖值。
总结
这一节是介绍如何使用Kinect SDK v2预览版取得AudioBeam。
与Kinect SDK v1相比,从Microphone Array取得Audio数据的处理更加简单。
【翻译】Kinect v2程序设计(C++-) AudioBeam篇
标签:style blog http io ar color os 使用 sp
原文地址:http://www.cnblogs.com/TracePlus/p/4138908.html