标签:des android blog http io ar os 使用 sp
文章转载至CSDN社区罗升阳的安卓之旅,原文地址:http://blog.csdn.net/luoshengyang/article/details/6629298
在前面一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路中, 介绍了在Android系统中Binder进程间通信机制中的Server角色是如何获得Service Manager远程接口的,即defaultServiceManager函数的实现。Server获得了Service Manager远程接口之后,就要把自己的Service添加到Service Manager中去,然后把自己启动起来,等待Client的请求。本文将通过分析源代码了解Server的启动过程是怎么样的。
本文通过一个具体的例子来说明Binder机制中Server的启动过程。我们知道,在Android系统中,提供了多媒体播放的功能,这个功能是以服 务的形式来提供的。这里,我们就通过分析MediaPlayerService的实现来了解Media Server的启动过程。
首先,看一下MediaPlayerService的类图,以便我们理解下面要描述的内容。
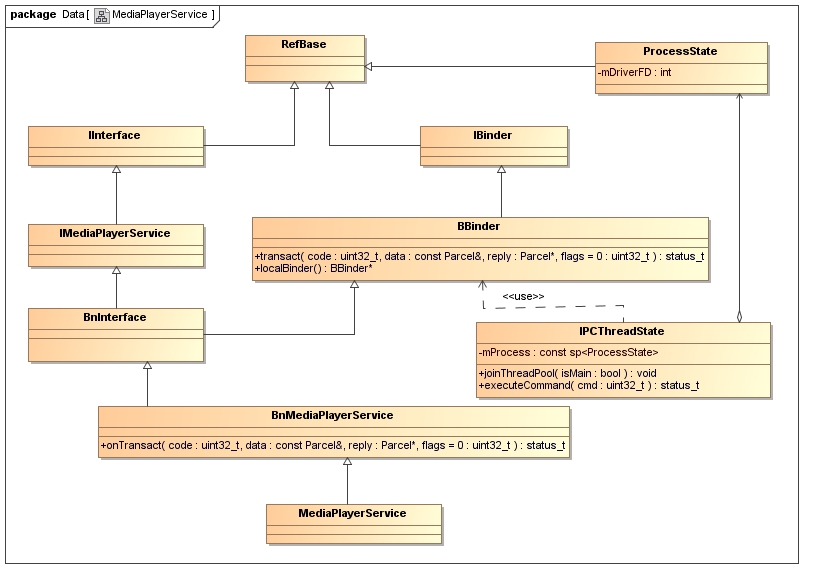
我们将要介绍的主角MediaPlayerService继承于BnMediaPlayerService类,熟悉Binder机制的同学应该知道 BnMediaPlayerService是一个Binder Native类,用来处理Client请求的。BnMediaPlayerService继承于 BnInterface<IMediaPlayerService>类,BnInterface是一个模板类,它定义在 frameworks/base/include/binder/IInterface.h文件中:
- template<typename INTERFACE>
- class BnInterface : public INTERFACE, public BBinder
- {
- public:
- virtual sp<IInterface> queryLocalInterface(const String16& _descriptor);
- virtual const String16& getInterfaceDescriptor() const;
-
- protected:
- virtual IBinder* onAsBinder();
- };
这里可以看出,BnMediaPlayerService实际是继承了IMediaPlayerService和BBinder类。 IMediaPlayerService和BBinder类又分别继承了IInterface和IBinder类,IInterface和IBinder 类又同时继承了RefBase类。
实际上,BnMediaPlayerService并不是直接接收到Client处发送过来的请求,而是使用了IPCThreadState接收 Client处发送过来的请求,而IPCThreadState又借助了ProcessState类来与Binder驱动程序交互。有关 IPCThreadState和ProcessState的关系,可以参考上一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路, 接下来也会有相应的描述。IPCThreadState接收到了Client处的请求后,就会调用BBinder类的transact函数,并传入相关参 数,BBinder类的transact函数最终调用BnMediaPlayerService类的onTransact函数,于是,就开始真正地处理 Client的请求了。
了解了MediaPlayerService类结构之后,就要开始进入到本文的主题了。
首先,看看MediaPlayerService是如何启动的。启动MediaPlayerService的代码位于frameworks/base/media/mediaserver/main_mediaserver.cpp文件中:
- int main(int argc, char** argv)
- {
- sp<ProcessState> proc(ProcessState::self());
- sp<IServiceManager> sm = defaultServiceManager();
- LOGI("ServiceManager: %p", sm.get());
- AudioFlinger::instantiate();
- MediaPlayerService::instantiate();
- CameraService::instantiate();
- AudioPolicyService::instantiate();
- ProcessState::self()->startThreadPool();
- IPCThreadState::self()->joinThreadPool();
- }
这里我们不关注AudioFlinger和CameraService相关的代码。
先看下面这句代码:
- sp<ProcessState> proc(ProcessState::self());
这句代码的作用是通过ProcessState::self()调用创建一个ProcessState实例。ProcessState::self()是 ProcessState类的一个静态成员变量,定义在frameworks/base/libs/binder/ProcessState.cpp文件 中:
- sp<ProcessState> ProcessState::self()
- {
- if (gProcess != NULL) return gProcess;
-
- AutoMutex _l(gProcessMutex);
- if (gProcess == NULL) gProcess = new ProcessState;
- return gProcess;
- }
这里可以看出,这个函数作用是返回一个全局唯一的ProcessState实例gProcess。全局唯一实例变量gProcess定义在frameworks/base/libs/binder/Static.cpp文件中:
- Mutex gProcessMutex;
- sp<ProcessState> gProcess;
再来看ProcessState的构造函数:
- ProcessState::ProcessState()
- : mDriverFD(open_driver())
- , mVMStart(MAP_FAILED)
- , mManagesContexts(false)
- , mBinderContextCheckFunc(NULL)
- , mBinderContextUserData(NULL)
- , mThreadPoolStarted(false)
- , mThreadPoolSeq(1)
- {
- if (mDriverFD >= 0) {
-
-
-
- #if !defined(HAVE_WIN32_IPC)
-
- mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
- if (mVMStart == MAP_FAILED) {
-
- LOGE("Using /dev/binder failed: unable to mmap transaction memory.\n");
- close(mDriverFD);
- mDriverFD = -1;
- }
- #else
- mDriverFD = -1;
- #endif
- }
- if (mDriverFD < 0) {
-
- }
- }
这个函数有两个关键地方,一是通过open_driver函数打开Binder设备文件/dev/binder,并将打开设备文件描述符保存在成员变量mDriverFD中;二是通过mmap来把设备文件/dev/binder映射到内存中。
先看open_driver函数的实现,这个函数同样位于frameworks/base/libs/binder/ProcessState.cpp文件中:
- static int open_driver()
- {
- if (gSingleProcess) {
- return -1;
- }
-
- int fd = open("/dev/binder", O_RDWR);
- if (fd >= 0) {
- fcntl(fd, F_SETFD, FD_CLOEXEC);
- int vers;
- #if defined(HAVE_ANDROID_OS)
- status_t result = ioctl(fd, BINDER_VERSION, &vers);
- #else
- status_t result = -1;
- errno = EPERM;
- #endif
- if (result == -1) {
- LOGE("Binder ioctl to obtain version failed: %s", strerror(errno));
- close(fd);
- fd = -1;
- }
- if (result != 0 || vers != BINDER_CURRENT_PROTOCOL_VERSION) {
- LOGE("Binder driver protocol does not match user space protocol!");
- close(fd);
- fd = -1;
- }
- #if defined(HAVE_ANDROID_OS)
- size_t maxThreads = 15;
- result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);
- if (result == -1) {
- LOGE("Binder ioctl to set max threads failed: %s", strerror(errno));
- }
- #endif
-
- } else {
- LOGW("Opening ‘/dev/binder‘ failed: %s\n", strerror(errno));
- }
- return fd;
- }
这个函数的作用主要是通过open文件操作函数来打开/dev/binder设备文件,然后再调用ioctl文件控制函数来分别执行 BINDER_VERSION和BINDER_SET_MAX_THREADS两个命令来和Binder驱动程序进行交互,前者用于获得当前Binder 驱动程序的版本号,后者用于通知Binder驱动程序,MediaPlayerService最多可同时启动15个线程来处理Client端的请求。
open在Binder驱动程序中的具体实现,请参考前面一篇文章浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路,这里不再重复描述。打开/dev/binder设备文件后,Binder驱动程序就为MediaPlayerService进程创建了一个struct binder_proc结构体实例来维护MediaPlayerService进程上下文相关信息。
我们来看一下ioctl文件操作函数执行BINDER_VERSION命令的过程:
- status_t result = ioctl(fd, BINDER_VERSION, &vers);
这个函数调用最终进入到Binder驱动程序的binder_ioctl函数中,我们只关注BINDER_VERSION相关的部分逻辑:
- static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
- {
- int ret;
- struct binder_proc *proc = filp->private_data;
- struct binder_thread *thread;
- unsigned int size = _IOC_SIZE(cmd);
- void __user *ubuf = (void __user *)arg;
-
-
-
- ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
- if (ret)
- return ret;
-
- mutex_lock(&binder_lock);
- thread = binder_get_thread(proc);
- if (thread == NULL) {
- ret = -ENOMEM;
- goto err;
- }
-
- switch (cmd) {
- ......
- case BINDER_VERSION:
- if (size != sizeof(struct binder_version)) {
- ret = -EINVAL;
- goto err;
- }
- if (put_user(BINDER_CURRENT_PROTOCOL_VERSION, &((struct binder_version *)ubuf)->protocol_version)) {
- ret = -EINVAL;
- goto err;
- }
- break;
- ......
- }
- ret = 0;
- err:
- ......
- return ret;
- }
很简单,只是将BINDER_CURRENT_PROTOCOL_VERSION写入到传入的参数arg指向的用户缓冲区中去就返回了。
BINDER_CURRENT_PROTOCOL_VERSION是一个宏,定义在kernel/common/drivers/staging
/android/binder.h文件中:
- #define BINDER_CURRENT_PROTOCOL_VERSION 7
这里为什么要把ubuf转换成struct
binder_version之后,再通过其protocol_version成员变量再来写入呢,转了一圈,最终内容还是写入到ubuf中。我们看一下
struct
binder_version的定义就会明白,同样是在kernel/common/drivers/staging/android/binder.h
文件中:
- struct binder_version {
-
- signed long protocol_version;
- };
从注释中可以看出来,这里是考虑到兼容性,因为以后很有可能不是用signed long来表示版本号。
这里有一个重要的地方要注意的是,由于这里是打开设备文件/dev/binder之后,第一次进入到binder_ioctl函数,因此,这里调用
binder_get_thread的时候,就会为当前线程创建一个struct
binder_thread结构体变量来维护线程上下文信息,具体可以参考浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路一文。
接着我们再来看一下ioctl文件操作函数执行BINDER_SET_MAX_THREADS命令的过程:
- result = ioctl(fd, BINDER_SET_MAX_THREADS, &maxThreads);
这个函数调用最终进入到Binder驱动程序的binder_ioctl函数中,我们只关注BINDER_SET_MAX_THREADS相关的部分逻辑:
- static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
- {
- int ret;
- struct binder_proc *proc = filp->private_data;
- struct binder_thread *thread;
- unsigned int size = _IOC_SIZE(cmd);
- void __user *ubuf = (void __user *)arg;
-
-
-
- ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
- if (ret)
- return ret;
-
- mutex_lock(&binder_lock);
- thread = binder_get_thread(proc);
- if (thread == NULL) {
- ret = -ENOMEM;
- goto err;
- }
-
- switch (cmd) {
- ......
- case BINDER_SET_MAX_THREADS:
- if (copy_from_user(&proc->max_threads, ubuf, sizeof(proc->max_threads))) {
- ret = -EINVAL;
- goto err;
- }
- break;
- ......
- }
- ret = 0;
- err:
- ......
- return ret;
- }
这里实现也是非常简单,只是简单地把用户传进来的参数保存在proc->max_threads中就完毕了。注意,这里再调用
binder_get_thread函数的时候,就可以在proc->threads中找到当前线程对应的struct
binder_thread结构了,因为前面已经创建好并保存在proc->threads红黑树中。
回到ProcessState的构造函数中,这里还通过mmap函数来把设备文件/dev/binder映射到内存中,这个函数在浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路一文也已经有详细介绍,这里不再重复描述。宏BINDER_VM_SIZE就定义在ProcessState.cpp文件中:
- #define BINDER_VM_SIZE ((1*1024*1024) - (4096 *2))
mmap函数调用完成之后,Binder驱动程序就为当前进程预留了BINDER_VM_SIZE大小的内存空间了。
这样,ProcessState全局唯一变量gProcess就创建完毕了,回到frameworks/base/media/mediaserver
/main_mediaserver.cpp文件中的main函数,下一步是调用defaultServiceManager函数来获得Service
Manager的远程接口,这个已经在上一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路有详细描述,读者可以回过头去参考一下。
再接下来,就进入到MediaPlayerService::instantiate函数把MediaPlayerService添加到Service
Manger中去了。这个函数定义在frameworks/base/media/libmediaplayerservice
/MediaPlayerService.cpp文件中:
- void MediaPlayerService::instantiate() {
- defaultServiceManager()->addService(
- String16("media.player"), new MediaPlayerService());
- }
我们重点看一下IServiceManger::addService的过程,这有助于我们加深对Binder机制的理解。
在上一篇文章浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路中
说到,defaultServiceManager返回的实际是一个BpServiceManger类实例,因此,我们看一下
BpServiceManger::addService的实现,这个函数实现在frameworks/base/libs/binder
/IServiceManager.cpp文件中:
- class BpServiceManager : public BpInterface<IServiceManager>
- {
- public:
- BpServiceManager(const sp<IBinder>& impl)
- : BpInterface<IServiceManager>(impl)
- {
- }
-
- ......
-
- virtual status_t addService(const String16& name, const sp<IBinder>& service)
- {
- Parcel data, reply;
- data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
- data.writeString16(name);
- data.writeStrongBinder(service);
- status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
- return err == NO_ERROR ? reply.readExceptionCode()
- }
-
- ......
-
- };
这里的Parcel类是用来于序列化进程间通信数据用的。
先来看这一句的调用:
- data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
IServiceManager::getInterfaceDescriptor()返回来的是一个字符串,
即"android.os.IServiceManager",具体可以参考IServiceManger的实现。我们看一下
Parcel::writeInterfaceToken的实现,位于frameworks/base/libs/binder/Parcel.cpp文
件中:
- status_t Parcel::writeInterfaceToken(const String16& interface)
- {
- writeInt32(IPCThreadState::self()->getStrictModePolicy() |
- STRICT_MODE_PENALTY_GATHER);
-
- return writeString16(interface);
- }
它的作用是写入一个整数和一个字符串到Parcel中去。
再来看下面的调用:
- data.writeString16(name);
这里又是写入一个字符串到Parcel中去,这里的name即是上面传进来的“media.player”字符串。
往下看:
- data.writeStrongBinder(service);
这里定入一个Binder对象到Parcel去。我们重点看一下这个函数的实现,因为它涉及到进程间传输Binder实体的问题,比较复杂,需要重点关
注,同时,也是理解Binder机制的一个重点所在。注意,这里的service参数是一个MediaPlayerService对象。
- status_t Parcel::writeStrongBinder(const sp<IBinder>& val)
- {
- return flatten_binder(ProcessState::self(), val, this);
- }
看到flatten_binder函数,是不是似曾相识的感觉?我们在前面一篇文章浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路中,曾经提到在Binder驱动程序中,使用struct flat_binder_object来表示传输中的一个binder对象,它的定义如下所示:
- struct flat_binder_object {
-
- unsigned long type;
- unsigned long flags;
-
-
- union {
- void *binder;
- signed long handle;
- };
-
-
- void *cookie;
- };
各个成员变量的含义请参考资料Android Binder设计与实现。
我们进入到flatten_binder函数看看:
- status_t flatten_binder(const sp<ProcessState>& proc,
- const sp<IBinder>& binder, Parcel* out)
- {
- flat_binder_object obj;
-
- obj.flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS;
- if (binder != NULL) {
- IBinder *local = binder->localBinder();
- if (!local) {
- BpBinder *proxy = binder->remoteBinder();
- if (proxy == NULL) {
- LOGE("null proxy");
- }
- const int32_t handle = proxy ? proxy->handle() : 0;
- obj.type = BINDER_TYPE_HANDLE;
- obj.handle = handle;
- obj.cookie = NULL;
- } else {
- obj.type = BINDER_TYPE_BINDER;
- obj.binder = local->getWeakRefs();
- obj.cookie = local;
- }
- } else {
- obj.type = BINDER_TYPE_BINDER;
- obj.binder = NULL;
- obj.cookie = NULL;
- }
-
- return finish_flatten_binder(binder, obj, out);
- }
首先是初始化flat_binder_object的flags域:
- obj.flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS;
0x7f表示处理本Binder实体请求数据包的线程的最低优先级,FLAT_BINDER_FLAG_ACCEPTS_FDS表示这个Binder实体可以接受文件描述符,Binder实体在收到文件描述符时,就会在本进程中打开这个文件。
传进来的binder即为MediaPlayerService::instantiate函数中new出来的MediaPlayerService实
例,因此,不为空。又由于MediaPlayerService继承自BBinder类,它是一个本地Binder实体,因此
binder->localBinder返回一个BBinder指针,而且肯定不为空,于是执行下面语句:
- obj.type = BINDER_TYPE_BINDER;
- obj.binder = local->getWeakRefs();
- obj.cookie = local;
设置了flat_binder_obj的其他成员变量,注意,指向这个Binder实体地址的指针local保存在flat_binder_obj的成员变量cookie中。
函数调用finish_flatten_binder来将这个flat_binder_obj写入到Parcel中去:
- inline static status_t finish_flatten_binder(
- const sp<IBinder>& binder, const flat_binder_object& flat, Parcel* out)
- {
- return out->writeObject(flat, false);
- }
Parcel::writeObject的实现如下:
- status_t Parcel::writeObject(const flat_binder_object& val, bool nullMetaData)
- {
- const bool enoughData = (mDataPos+sizeof(val)) <= mDataCapacity;
- const bool enoughObjects = mObjectsSize < mObjectsCapacity;
- if (enoughData && enoughObjects) {
- restart_write:
- *reinterpret_cast<flat_binder_object*>(mData+mDataPos) = val;
-
-
- if (nullMetaData || val.binder != NULL) {
- mObjects[mObjectsSize] = mDataPos;
- acquire_object(ProcessState::self(), val, this);
- mObjectsSize++;
- }
-
-
- if (val.type == BINDER_TYPE_FD) {
- mHasFds = mFdsKnown = true;
- }
-
- return finishWrite(sizeof(flat_binder_object));
- }
-
- if (!enoughData) {
- const status_t err = growData(sizeof(val));
- if (err != NO_ERROR) return err;
- }
- if (!enoughObjects) {
- size_t newSize = ((mObjectsSize+2)*3)/2;
- size_t* objects = (size_t*)realloc(mObjects, newSize*sizeof(size_t));
- if (objects == NULL) return NO_MEMORY;
- mObjects = objects;
- mObjectsCapacity = newSize;
- }
-
- goto restart_write;
- }
这里除了把flat_binder_obj写到Parcel里面之内,还要记录这个flat_binder_obj在Parcel里面的偏移位置:
- mObjects[mObjectsSize] = mDataPos;
这里因为,如果进程间传输的数据间带有Binder对象的时候,Binder驱动程序需要作进一步的处理,以维护各个Binder实体的一致性,下面我们将会看到Binder驱动程序是怎么处理这些Binder对象的。
再回到BpServiceManager::addService函数中,调用下面语句:
- status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
回到浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路一文中的类图中去看一下,这里的remote成员函数来自于BpRefBase类,它返回一个BpBinder指针。因此,我们继续进入到BpBinder::transact函数中去看看:
- status_t BpBinder::transact(
- uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
- {
-
- if (mAlive) {
- status_t status = IPCThreadState::self()->transact(
- mHandle, code, data, reply, flags);
- if (status == DEAD_OBJECT) mAlive = 0;
- return status;
- }
-
- return DEAD_OBJECT;
- }
这里又调用了IPCThreadState::transact进执行实际的操作。注意,这里的mHandle为0,code为
ADD_SERVICE_TRANSACTION。ADD_SERVICE_TRANSACTION是上面以参数形式传进来的,那mHandle为什么是
0呢?因为这里表示的是Service Manager远程接口,它的句柄值一定是0,具体请参考浅谈Android系统进程间通信(IPC)机制Binder中的Server和Client获得Service Manager接口之路一文。
再进入到IPCThreadState::transact函数,看看做了些什么事情:
- status_t IPCThreadState::transact(int32_t handle,
- uint32_t code, const Parcel& data,
- Parcel* reply, uint32_t flags)
- {
- status_t err = data.errorCheck();
-
- flags |= TF_ACCEPT_FDS;
-
- IF_LOG_TRANSACTIONS() {
- TextOutput::Bundle _b(alog);
- alog << "BC_TRANSACTION thr " << (void*)pthread_self() << " / hand "
- << handle << " / code " << TypeCode(code) << ": "
- << indent << data << dedent << endl;
- }
-
- if (err == NO_ERROR) {
- LOG_ONEWAY(">>>> SEND from pid %d uid %d %s", getpid(), getuid(),
- (flags & TF_ONE_WAY) == 0 ? "READ REPLY" : "ONE WAY");
- err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
- }
-
- if (err != NO_ERROR) {
- if (reply) reply->setError(err);
- return (mLastError = err);
- }
-
- if ((flags & TF_ONE_WAY) == 0) {
- #if 0
- if (code == 4) {
- LOGI(">>>>>> CALLING transaction 4");
- } else {
- LOGI(">>>>>> CALLING transaction %d", code);
- }
- #endif
- if (reply) {
- err = waitForResponse(reply);
- } else {
- Parcel fakeReply;
- err = waitForResponse(&fakeReply);
- }
- #if 0
- if (code == 4) {
- LOGI("<<<<<< RETURNING transaction 4");
- } else {
- LOGI("<<<<<< RETURNING transaction %d", code);
- }
- #endif
-
- IF_LOG_TRANSACTIONS() {
- TextOutput::Bundle _b(alog);
- alog << "BR_REPLY thr " << (void*)pthread_self() << " / hand "
- << handle << ": ";
- if (reply) alog << indent << *reply << dedent << endl;
- else alog << "(none requested)" << endl;
- }
- } else {
- err = waitForResponse(NULL, NULL);
- }
-
- return err;
- }
IPCThreadState::transact函数的参数flags是一个默认值为0的参数,上面没有传相应的实参进来,因此,这里就为0。
函数首先调用writeTransactionData函数准备好一个struct binder_transaction_data结构体变量,这个
是等一下要传输给Binder驱动程序的。struct binder_transaction_data的定义我们在浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路一文中有详细描述,读者不妨回过去读一下。这里为了方便描述,将struct binder_transaction_data的定义再次列出来:
- struct binder_transaction_data {
-
- union {
- size_t handle;
- void *ptr;
- } target;
- void *cookie;
- unsigned int code;
-
-
- unsigned int flags;
- pid_t sender_pid;
- uid_t sender_euid;
- size_t data_size;
- size_t offsets_size;
-
-
- union {
- struct {
-
- const void *buffer;
-
- const void *offsets;
- } ptr;
- uint8_t buf[8];
- } data;
- };
writeTransactionData函数的实现如下:
- status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
- int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
- {
- binder_transaction_data tr;
-
- tr.target.handle = handle;
- tr.code = code;
- tr.flags = binderFlags;
-
- const status_t err = data.errorCheck();
- if (err == NO_ERROR) {
- tr.data_size = data.ipcDataSize();
- tr.data.ptr.buffer = data.ipcData();
- tr.offsets_size = data.ipcObjectsCount()*sizeof(size_t);
- tr.data.ptr.offsets = data.ipcObjects();
- } else if (statusBuffer) {
- tr.flags |= TF_STATUS_CODE;
- *statusBuffer = err;
- tr.data_size = sizeof(status_t);
- tr.data.ptr.buffer = statusBuffer;
- tr.offsets_size = 0;
- tr.data.ptr.offsets = NULL;
- } else {
- return (mLastError = err);
- }
-
- mOut.writeInt32(cmd);
- mOut.write(&tr, sizeof(tr));
-
- return NO_ERROR;
- }
注意,这里的cmd为BC_TRANSACTION。 这个函数很简单,在这个场景下,就是执行下面语句来初始化本地变量tr:
- tr.data_size = data.ipcDataSize();
- tr.data.ptr.buffer = data.ipcData();
- tr.offsets_size = data.ipcObjectsCount()*sizeof(size_t);
- tr.data.ptr.offsets = data.ipcObjects();
回忆一下上面的内容,写入到tr.data.ptr.buffer的内容相当于下面的内容:
- writeInt32(IPCThreadState::self()->getStrictModePolicy() |
- STRICT_MODE_PENALTY_GATHER);
- writeString16("android.os.IServiceManager");
- writeString16("media.player");
- writeStrongBinder(new MediaPlayerService());
其中包含了一个Binder实体MediaPlayerService,因此需要设置tr.offsets_size就为
1,tr.data.ptr.offsets就指向了这个MediaPlayerService的地址在tr.data.ptr.buffer中的偏移
量。最后,将tr的内容保存在IPCThreadState的成员变量mOut中。
回到IPCThreadState::transact函数中,接下去看,(flags & TF_ONE_WAY) ==
0为true,并且reply不为空,所以最终进入到waitForResponse(reply)这条路径来。我们看一下
waitForResponse函数的实现:
- status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
- {
- int32_t cmd;
- int32_t err;
-
- while (1) {
- if ((err=talkWithDriver()) < NO_ERROR) break;
- err = mIn.errorCheck();
- if (err < NO_ERROR) break;
- if (mIn.dataAvail() == 0) continue;
-
- cmd = mIn.readInt32();
-
- IF_LOG_COMMANDS() {
- alog << "Processing waitForResponse Command: "
- << getReturnString(cmd) << endl;
- }
-
- switch (cmd) {
- case BR_TRANSACTION_COMPLETE:
- if (!reply && !acquireResult) goto finish;
- break;
-
- case BR_DEAD_REPLY:
- err = DEAD_OBJECT;
- goto finish;
-
- case BR_FAILED_REPLY:
- err = FAILED_TRANSACTION;
- goto finish;
-
- case BR_ACQUIRE_RESULT:
- {
- LOG_ASSERT(acquireResult != NULL, "Unexpected brACQUIRE_RESULT");
- const int32_t result = mIn.readInt32();
- if (!acquireResult) continue;
- *acquireResult = result ? NO_ERROR : INVALID_OPERATION;
- }
- goto finish;
-
- case BR_REPLY:
- {
- binder_transaction_data tr;
- err = mIn.read(&tr, sizeof(tr));
- LOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY");
- if (err != NO_ERROR) goto finish;
-
- if (reply) {
- if ((tr.flags & TF_STATUS_CODE) == 0) {
- reply->ipcSetDataReference(
- reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
- tr.data_size,
- reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
- tr.offsets_size/sizeof(size_t),
- freeBuffer, this);
- } else {
- err = *static_cast<const status_t*>(tr.data.ptr.buffer);
- freeBuffer(NULL,
- reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
- tr.data_size,
- reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
- tr.offsets_size/sizeof(size_t), this);
- }
- } else {
- freeBuffer(NULL,
- reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
- tr.data_size,
- reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
- tr.offsets_size/sizeof(size_t), this);
- continue;
- }
- }
- goto finish;
-
- default:
- err = executeCommand(cmd);
- if (err != NO_ERROR) goto finish;
- break;
- }
- }
-
- finish:
- if (err != NO_ERROR) {
- if (acquireResult) *acquireResult = err;
- if (reply) reply->setError(err);
- mLastError = err;
- }
-
- return err;
- }
这个函数虽然很长,但是主要调用了talkWithDriver函数来与Binder驱动程序进行交互:
- status_t IPCThreadState::talkWithDriver(bool doReceive)
- {
- LOG_ASSERT(mProcess->mDriverFD >= 0, "Binder driver is not opened");
-
- binder_write_read bwr;
-
-
- const bool needRead = mIn.dataPosition() >= mIn.dataSize();
-
-
-
-
- const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
-
- bwr.write_size = outAvail;
- bwr.write_buffer = (long unsigned int)mOut.data();
-
-
- if (doReceive && needRead) {
- bwr.read_size = mIn.dataCapacity();
- bwr.read_buffer = (long unsigned int)mIn.data();
- } else {
- bwr.read_size = 0;
- }
-
- IF_LOG_COMMANDS() {
- TextOutput::Bundle _b(alog);
- if (outAvail != 0) {
- alog << "Sending commands to driver: " << indent;
- const void* cmds = (const void*)bwr.write_buffer;
- const void* end = ((const uint8_t*)cmds)+bwr.write_size;
- alog << HexDump(cmds, bwr.write_size) << endl;
- while (cmds < end) cmds = printCommand(alog, cmds);
- alog << dedent;
- }
- alog << "Size of receive buffer: " << bwr.read_size
- << ", needRead: " << needRead << ", doReceive: " << doReceive << endl;
- }
-
-
- if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
-
- bwr.write_consumed = 0;
- bwr.read_consumed = 0;
- status_t err;
- do {
- IF_LOG_COMMANDS() {
- alog << "About to read/write, write size = " << mOut.dataSize() << endl;
- }
- #if defined(HAVE_ANDROID_OS)
- if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
- err = NO_ERROR;
- else
- err = -errno;
- #else
- err = INVALID_OPERATION;
- #endif
- IF_LOG_COMMANDS() {
- alog << "Finished read/write, write size = " << mOut.dataSize() << endl;
- }
- } while (err == -EINTR);
-
- IF_LOG_COMMANDS() {
- alog << "Our err: " << (void*)err << ", write consumed: "
- << bwr.write_consumed << " (of " << mOut.dataSize()
- << "), read consumed: " << bwr.read_consumed << endl;
- }
-
- if (err >= NO_ERROR) {
- if (bwr.write_consumed > 0) {
- if (bwr.write_consumed < (ssize_t)mOut.dataSize())
- mOut.remove(0, bwr.write_consumed);
- else
- mOut.setDataSize(0);
- }
- if (bwr.read_consumed > 0) {
- mIn.setDataSize(bwr.read_consumed);
- mIn.setDataPosition(0);
- }
- IF_LOG_COMMANDS() {
- TextOutput::Bundle _b(alog);
- alog << "Remaining data size: " << mOut.dataSize() << endl;
- alog << "Received commands from driver: " << indent;
- const void* cmds = mIn.data();
- const void* end = mIn.data() + mIn.dataSize();
- alog << HexDump(cmds, mIn.dataSize()) << endl;
- while (cmds < end) cmds = printReturnCommand(alog, cmds);
- alog << dedent;
- }
- return NO_ERROR;
- }
-
- return err;
- }
这里doReceive和needRead均为1,有兴趣的读者可以自已分析一下。因此,这里告诉Binder驱动程序,先执行write操作,再执行read操作,下面我们将会看到。
最后,通过ioctl(mProcess->mDriverFD, BINDER_WRITE_READ,
&bwr)进行到Binder驱动程序的binder_ioctl函数,我们只关注cmd为BINDER_WRITE_READ的逻辑:
- static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
- {
- int ret;
- struct binder_proc *proc = filp->private_data;
- struct binder_thread *thread;
- unsigned int size = _IOC_SIZE(cmd);
- void __user *ubuf = (void __user *)arg;
-
-
-
- ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
- if (ret)
- return ret;
-
- mutex_lock(&binder_lock);
- thread = binder_get_thread(proc);
- if (thread == NULL) {
- ret = -ENOMEM;
- goto err;
- }
-
- switch (cmd) {
- case BINDER_WRITE_READ: {
- struct binder_write_read bwr;
- if (size != sizeof(struct binder_write_read)) {
- ret = -EINVAL;
- goto err;
- }
- if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
- ret = -EFAULT;
- goto err;
- }
- if (binder_debug_mask & BINDER_DEBUG_READ_WRITE)
- printk(KERN_INFO "binder: %d:%d write %ld at %08lx, read %ld at %08lx\n",
- proc->pid, thread->pid, bwr.write_size, bwr.write_buffer, bwr.read_size, bwr.read_buffer);
- if (bwr.write_size > 0) {
- ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
- if (ret < 0) {
- bwr.read_consumed = 0;
- if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
- ret = -EFAULT;
- goto err;
- }
- }
- if (bwr.read_size > 0) {
- ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
- if (!list_empty(&proc->todo))
- wake_up_interruptible(&proc->wait);
- if (ret < 0) {
- if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
- ret = -EFAULT;
- goto err;
- }
- }
- if (binder_debug_mask & BINDER_DEBUG_READ_WRITE)
- printk(KERN_INFO "binder: %d:%d wrote %ld of %ld, read return %ld of %ld\n",
- proc->pid, thread->pid, bwr.write_consumed, bwr.write_size, bwr.read_consumed, bwr.read_size);
- if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
- ret = -EFAULT;
- goto err;
- }
- break;
- }
- ......
- }
- ret = 0;
- err:
- ......
- return ret;
- }
函数首先是将用户传进来的参数拷贝到本地变量struct binder_write_read
bwr中去。这里bwr.write_size >
0为true,因此,进入到binder_thread_write函数中,我们只关注BC_TRANSACTION部分的逻辑:
- binder_thread_write(struct binder_proc *proc, struct binder_thread *thread,
- void __user *buffer, int size, signed long *consumed)
- {
- uint32_t cmd;
- void __user *ptr = buffer + *consumed;
- void __user *end = buffer + size;
-
- while (ptr < end && thread->return_error == BR_OK) {
- if (get_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
- binder_stats.bc[_IOC_NR(cmd)]++;
- proc->stats.bc[_IOC_NR(cmd)]++;
- thread->stats.bc[_IOC_NR(cmd)]++;
- }
- switch (cmd) {
- .....
- case BC_TRANSACTION:
- case BC_REPLY: {
- struct binder_transaction_data tr;
-
- if (copy_from_user(&tr, ptr, sizeof(tr)))
- return -EFAULT;
- ptr += sizeof(tr);
- binder_transaction(proc, thread, &tr, cmd == BC_REPLY);
- break;
- }
- ......
- }
- *consumed = ptr - buffer;
- }
- return 0;
- }
首先将用户传进来的transact参数拷贝在本地变量struct binder_transaction_data tr中去,接着调用binder_transaction函数进一步处理,这里我们忽略掉无关代码:
- static void
- binder_transaction(struct binder_proc *proc, struct binder_thread *thread,
- struct binder_transaction_data *tr, int reply)
- {
- struct binder_transaction *t;
- struct binder_work *tcomplete;
- size_t *offp, *off_end;
- struct binder_proc *target_proc;
- struct binder_thread *target_thread = NULL;
- struct binder_node *target_node = NULL;
- struct list_head *target_list;
- wait_queue_head_t *target_wait;
- struct binder_transaction *in_reply_to = NULL;
- struct binder_transaction_log_entry *e;
- uint32_t return_error;
-
- ......
-
- if (reply) {
- ......
- } else {
- if (tr->target.handle) {
- ......
- } else {
- target_node = binder_context_mgr_node;
- if (target_node == NULL) {
- return_error = BR_DEAD_REPLY;
- goto err_no_context_mgr_node;
- }
- }
- ......
- target_proc = target_node->proc;
- if (target_proc == NULL) {
- return_error = BR_DEAD_REPLY;
- goto err_dead_binder;
- }
- ......
- }
- if (target_thread) {
- ......
- } else {
- target_list = &target_proc->todo;
- target_wait = &target_proc->wait;
- }
-
- ......
-
-
- t = kzalloc(sizeof(*t), GFP_KERNEL);
- if (t == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_t_failed;
- }
- ......
-
- tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
- if (tcomplete == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_tcomplete_failed;
- }
-
- ......
-
- if (!reply && !(tr->flags & TF_ONE_WAY))
- t->from = thread;
- else
- t->from = NULL;
- t->sender_euid = proc->tsk->cred->euid;
- t->to_proc = target_proc;
- t->to_thread = target_thread;
- t->code = tr->code;
- t->flags = tr->flags;
- t->priority = task_nice(current);
- t->buffer = binder_alloc_buf(target_proc, tr->data_size,
- tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
- if (t->buffer == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_alloc_buf_failed;
- }
- t->buffer->allow_user_free = 0;
- t->buffer->debug_id = t->debug_id;
- t->buffer->transaction = t;
- t->buffer->target_node = target_node;
- if (target_node)
- binder_inc_node(target_node, 1, 0, NULL);
-
- offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));
-
- if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
- if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
- ......
-
- off_end = (void *)offp + tr->offsets_size;
- for (; offp < off_end; offp++) {
- struct flat_binder_object *fp;
- ......
- fp = (struct flat_binder_object *)(t->buffer->data + *offp);
- switch (fp->type) {
- case BINDER_TYPE_BINDER:
- case BINDER_TYPE_WEAK_BINDER: {
- struct binder_ref *ref;
- struct binder_node *node = binder_get_node(proc, fp->binder);
- if (node == NULL) {
- node = binder_new_node(proc, fp->binder, fp->cookie);
- if (node == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_new_node_failed;
- }
- node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
- node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
- }
- if (fp->cookie != node->cookie) {
- ......
- goto err_binder_get_ref_for_node_failed;
- }
- ref = binder_get_ref_for_node(target_proc, node);
- if (ref == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_get_ref_for_node_failed;
- }
- if (fp->type == BINDER_TYPE_BINDER)
- fp->type = BINDER_TYPE_HANDLE;
- else
- fp->type = BINDER_TYPE_WEAK_HANDLE;
- fp->handle = ref->desc;
- binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE, &thread->todo);
- ......
-
- } break;
- ......
- }
- }
-
- if (reply) {
- ......
- } else if (!(t->flags & TF_ONE_WAY)) {
- BUG_ON(t->buffer->async_transaction != 0);
- t->need_reply = 1;
- t->from_parent = thread->transaction_stack;
- thread->transaction_stack = t;
- } else {
- ......
- }
- t->work.type = BINDER_WORK_TRANSACTION;
- list_add_tail(&t->work.entry, target_list);
- tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
- list_add_tail(&tcomplete->entry, &thread->todo);
- if (target_wait)
- wake_up_interruptible(target_wait);
- return;
- ......
- }
注意,这里传进来的参数reply为0,tr->target.handle也为0。因此,target_proc、target_thread、target_node、target_list和target_wait的值分别为:
- target_node = binder_context_mgr_node;
- target_proc = target_node->proc;
- target_list = &target_proc->todo;
- target_wait = &target_proc->wait;
接着,分配了一个待处理事务t和一个待完成工作项tcomplete,并执行初始化工作:
- t = kzalloc(sizeof(*t), GFP_KERNEL);
- if (t == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_t_failed;
- }
- ......
-
- tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
- if (tcomplete == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_tcomplete_failed;
- }
-
- ......
-
- if (!reply && !(tr->flags & TF_ONE_WAY))
- t->from = thread;
- else
- t->from = NULL;
- t->sender_euid = proc->tsk->cred->euid;
- t->to_proc = target_proc;
- t->to_thread = target_thread;
- t->code = tr->code;
- t->flags = tr->flags;
- t->priority = task_nice(current);
- t->buffer = binder_alloc_buf(target_proc, tr->data_size,
- tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
- if (t->buffer == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_alloc_buf_failed;
- }
- t->buffer->allow_user_free = 0;
- t->buffer->debug_id = t->debug_id;
- t->buffer->transaction = t;
- t->buffer->target_node = target_node;
- if (target_node)
- binder_inc_node(target_node, 1, 0, NULL);
-
- offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));
-
- if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
- if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
注意,这里的事务t是要交给target_proc处理的,在这个场景之下,就是Service Manager了。因此,下面的语句:
- t->buffer = binder_alloc_buf(target_proc, tr->data_size,
- tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
就是在Service Manager的进程空间中分配一块内存来保存用户传进入的参数了:
- if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
- if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
由于现在target_node要被使用了,增加它的引用计数:
- if (target_node)
- binder_inc_node(target_node, 1, 0, NULL);
接下去的for循环,就是用来处理传输数据中的Binder对象了。在我们的场景中,有一个类型为BINDER_TYPE_BINDER的Binder实体MediaPlayerService:
- switch (fp->type) {
- case BINDER_TYPE_BINDER:
- case BINDER_TYPE_WEAK_BINDER: {
- struct binder_ref *ref;
- struct binder_node *node = binder_get_node(proc, fp->binder);
- if (node == NULL) {
- node = binder_new_node(proc, fp->binder, fp->cookie);
- if (node == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_new_node_failed;
- }
- node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
- node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
- }
- if (fp->cookie != node->cookie) {
- ......
- goto err_binder_get_ref_for_node_failed;
- }
- ref = binder_get_ref_for_node(target_proc, node);
- if (ref == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_get_ref_for_node_failed;
- }
- if (fp->type == BINDER_TYPE_BINDER)
- fp->type = BINDER_TYPE_HANDLE;
- else
- fp->type = BINDER_TYPE_WEAK_HANDLE;
- fp->handle = ref->desc;
- binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE, &thread->todo);
- ......
-
- } break;
由于是第一次在Binder驱动程序中传输这个MediaPlayerService,调用binder_get_node函数查询这个Binder实体时,会返回空,于是binder_new_node在proc中新建一个,下次就可以直接使用了。
现在,由于要把这个Binder实体MediaPlayerService交给target_proc,也就是Service
Manager来管理,也就是说Service
Manager要引用这个MediaPlayerService了,于是通过binder_get_ref_for_node为
MediaPlayerService创建一个引用,并且通过binder_inc_ref来增加这个引用计数,防止这个引用还在使用过程当中就被销毁。
注意,到了这里的时候,t->buffer中的flat_binder_obj的type已经改为
BINDER_TYPE_HANDLE,handle已经改为ref->desc,跟原来不一样了,因为这个flat_binder_obj是最终
是要传给Service Manager的,而Service Manager只能够通过句柄值来引用这个Binder实体。
最后,把待处理事务加入到target_list列表中去:
- list_add_tail(&t->work.entry, target_list);
并且把待完成工作项加入到本线程的todo等待执行列表中去:
- list_add_tail(&tcomplete->entry, &thread->todo);
现在目标进程有事情可做了,于是唤醒它:
- if (target_wait)
- wake_up_interruptible(target_wait);
这里就是要唤醒Service Manager进程了。回忆一下前面浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路这篇文章,此时, Service Manager正在binder_thread_read函数中调用wait_event_interruptible进入休眠状态。
这里我们先忽略一下Service Manager被唤醒之后的场景,继续MedaPlayerService的启动过程,然后再回来。
回到binder_ioctl函数,bwr.read_size > 0为true,于是进入binder_thread_read函数:
- static int
- binder_thread_read(struct binder_proc *proc, struct binder_thread *thread,
- void __user *buffer, int size, signed long *consumed, int non_block)
- {
- void __user *ptr = buffer + *consumed;
- void __user *end = buffer + size;
-
- int ret = 0;
- int wait_for_proc_work;
-
- if (*consumed == 0) {
- if (put_user(BR_NOOP, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- }
-
- retry:
- wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
-
- .......
-
- if (wait_for_proc_work) {
- .......
- } else {
- if (non_block) {
- if (!binder_has_thread_work(thread))
- ret = -EAGAIN;
- } else
- ret = wait_event_interruptible(thread->wait, binder_has_thread_work(thread));
- }
-
- ......
-
- while (1) {
- uint32_t cmd;
- struct binder_transaction_data tr;
- struct binder_work *w;
- struct binder_transaction *t = NULL;
-
- if (!list_empty(&thread->todo))
- w = list_first_entry(&thread->todo, struct binder_work, entry);
- else if (!list_empty(&proc->todo) && wait_for_proc_work)
- w = list_first_entry(&proc->todo, struct binder_work, entry);
- else {
- if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
- goto retry;
- break;
- }
-
- if (end - ptr < sizeof(tr) + 4)
- break;
-
- switch (w->type) {
- ......
- case BINDER_WORK_TRANSACTION_COMPLETE: {
- cmd = BR_TRANSACTION_COMPLETE;
- if (put_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
-
- binder_stat_br(proc, thread, cmd);
- if (binder_debug_mask & BINDER_DEBUG_TRANSACTION_COMPLETE)
- printk(KERN_INFO "binder: %d:%d BR_TRANSACTION_COMPLETE\n",
- proc->pid, thread->pid);
-
- list_del(&w->entry);
- kfree(w);
- binder_stats.obj_deleted[BINDER_STAT_TRANSACTION_COMPLETE]++;
- } break;
- ......
- }
-
- if (!t)
- continue;
-
- ......
- }
-
- done:
- ......
- return 0;
- }
这里,thread->transaction_stack和thread->todo均不为空,于是
wait_for_proc_work为false,由于binder_has_thread_work的时候,返回true,这里因为
thread->todo不为空,因此,线程虽然调用了wait_event_interruptible,但是不会睡眠,于是继续往下执行。
由于thread->todo不为空,执行下列语句:
- if (!list_empty(&thread->todo))
- w = list_first_entry(&thread->todo, struct binder_work, entry);
w->type为BINDER_WORK_TRANSACTION_COMPLETE,这是在上面的binder_transaction函数设置的,于是执行:
- switch (w->type) {
- ......
- case BINDER_WORK_TRANSACTION_COMPLETE: {
- cmd = BR_TRANSACTION_COMPLETE;
- if (put_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
-
- ......
- list_del(&w->entry);
- kfree(w);
-
- } break;
- ......
- }
这里就将w从thread->todo删除了。由于这里t为空,重新执行while循环,这时由于已经没有事情可做了,最后就返回到
binder_ioctl函数中。注间,这里一共往用户传进来的缓冲区buffer写入了两个整数,分别是BR_NOOP和
BR_TRANSACTION_COMPLETE。
binder_ioctl函数返回到用户空间之前,把数据消耗情况拷贝回用户空间中:
- if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
- ret = -EFAULT;
- goto err;
- }
最后返回到IPCThreadState::talkWithDriver函数中,执行下面语句:
- if (err >= NO_ERROR) {
- if (bwr.write_consumed > 0) {
- if (bwr.write_consumed < (ssize_t)mOut.dataSize())
- mOut.remove(0, bwr.write_consumed);
- else
- mOut.setDataSize(0);
- }
- if (bwr.read_consumed > 0) {
- <pre code_snippet_id="134056" snippet_file_name="blog_20131230_54_6706870" name="code" class="cpp"> mIn.setDataSize(bwr.read_consumed);
- mIn.setDataPosition(0);</pre> } ...... return NO_ERROR; }
首先是把mOut的数据清空:
然后设置已经读取的内容的大小:
- mIn.setDataSize(bwr.read_consumed);
- mIn.setDataPosition(0);
然后返回到IPCThreadState::waitForResponse函数中。在
IPCThreadState::waitForResponse函数,先是从mIn读出一个整数,这个便是BR_NOOP了,这是一个空操作,什么也不
做。然后继续进入IPCThreadState::talkWithDriver函数中。
这时候,下面语句执行后:
- const bool needRead = mIn.dataPosition() >= mIn.dataSize();
needRead为false,因为在mIn中,尚有一个整数BR_TRANSACTION_COMPLETE未读出。
这时候,下面语句执行后:
- const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
outAvail等于0。因此,最后bwr.write_size和bwr.read_size均为
0,IPCThreadState::talkWithDriver函数什么也不做,直接返回到
IPCThreadState::waitForResponse函数中。在IPCThreadState::waitForResponse函数,又继
续从mIn读出一个整数,这个便是BR_TRANSACTION_COMPLETE:
- switch (cmd) {
- case BR_TRANSACTION_COMPLETE:
- if (!reply && !acquireResult) goto finish;
- break;
- ......
- }
reply不为NULL,因此,IPCThreadState::waitForResponse的循环没有结束,继续执行,又进入到IPCThreadState::talkWithDrive中。
这次,needRead就为true了,而outAvail仍为0,所以bwr.read_size不为0,bwr.write_size为0。于是通过:
- ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr)
进入到Binder驱动程序中的binder_ioctl函数中。由于bwr.write_size为0,bwr.read_size不为0,这次直接
就进入到binder_thread_read函数中。这时候,thread->transaction_stack不等于0,但是
thread->todo为空,于是线程就通过:
- wait_event_interruptible(thread->wait, binder_has_thread_work(thread));
进入睡眠状态,等待Service Manager来唤醒了。
现在,我们可以回到Service Manager被唤醒的过程了。我们接着前面浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路这
篇文章的最后,继续描述。此时, Service
Manager正在binder_thread_read函数中调用wait_event_interruptible_exclusive进入休眠状
态。上面被MediaPlayerService启动后进程唤醒后,继续执行binder_thread_read函数:
- static int
- binder_thread_read(struct binder_proc *proc, struct binder_thread *thread,
- void __user *buffer, int size, signed long *consumed, int non_block)
- {
- void __user *ptr = buffer + *consumed;
- void __user *end = buffer + size;
-
- int ret = 0;
- int wait_for_proc_work;
-
- if (*consumed == 0) {
- if (put_user(BR_NOOP, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- }
-
- retry:
- wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
-
- ......
-
- if (wait_for_proc_work) {
- ......
- if (non_block) {
- if (!binder_has_proc_work(proc, thread))
- ret = -EAGAIN;
- } else
- ret = wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread));
- } else {
- ......
- }
-
- ......
-
- while (1) {
- uint32_t cmd;
- struct binder_transaction_data tr;
- struct binder_work *w;
- struct binder_transaction *t = NULL;
-
- if (!list_empty(&thread->todo))
- w = list_first_entry(&thread->todo, struct binder_work, entry);
- else if (!list_empty(&proc->todo) && wait_for_proc_work)
- w = list_first_entry(&proc->todo, struct binder_work, entry);
- else {
- if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
- goto retry;
- break;
- }
-
- if (end - ptr < sizeof(tr) + 4)
- break;
-
- switch (w->type) {
- case BINDER_WORK_TRANSACTION: {
- t = container_of(w, struct binder_transaction, work);
- } break;
- ......
- }
-
- if (!t)
- continue;
-
- BUG_ON(t->buffer == NULL);
- if (t->buffer->target_node) {
- struct binder_node *target_node = t->buffer->target_node;
- tr.target.ptr = target_node->ptr;
- tr.cookie = target_node->cookie;
- ......
- cmd = BR_TRANSACTION;
- } else {
- ......
- }
- tr.code = t->code;
- tr.flags = t->flags;
- tr.sender_euid = t->sender_euid;
-
- if (t->from) {
- struct task_struct *sender = t->from->proc->tsk;
- tr.sender_pid = task_tgid_nr_ns(sender, current->nsproxy->pid_ns);
- } else {
- tr.sender_pid = 0;
- }
-
- tr.data_size = t->buffer->data_size;
- tr.offsets_size = t->buffer->offsets_size;
- tr.data.ptr.buffer = (void *)t->buffer->data + proc->user_buffer_offset;
- tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void *));
-
- if (put_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- if (copy_to_user(ptr, &tr, sizeof(tr)))
- return -EFAULT;
- ptr += sizeof(tr);
-
- ......
-
- list_del(&t->work.entry);
- t->buffer->allow_user_free = 1;
- if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) {
- t->to_parent = thread->transaction_stack;
- t->to_thread = thread;
- thread->transaction_stack = t;
- } else {
- t->buffer->transaction = NULL;
- kfree(t);
- binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++;
- }
- break;
- }
-
- done:
-
- ......
- return 0;
- }
Service Manager被唤醒之后,就进入while循环开始处理事务了。这里wait_for_proc_work等于1,并且proc->todo不为空,所以从proc->todo列表中得到第一个工作项:
- w = list_first_entry(&proc->todo, struct binder_work, entry);
从上面的描述中,我们知道,这个工作项的类型为BINDER_WORK_TRANSACTION,于是通过下面语句得到事务项:
- t = container_of(w, struct binder_transaction, work);
接着就是把事务项t中的数据拷贝到本地局部变量struct binder_transaction_data tr中去了:
- if (t->buffer->target_node) {
- struct binder_node *target_node = t->buffer->target_node;
- tr.target.ptr = target_node->ptr;
- tr.cookie = target_node->cookie;
- ......
- cmd = BR_TRANSACTION;
- } else {
- ......
- }
- tr.code = t->code;
- tr.flags = t->flags;
- tr.sender_euid = t->sender_euid;
-
- if (t->from) {
- struct task_struct *sender = t->from->proc->tsk;
- tr.sender_pid = task_tgid_nr_ns(sender, current->nsproxy->pid_ns);
- } else {
- tr.sender_pid = 0;
- }
-
- tr.data_size = t->buffer->data_size;
- tr.offsets_size = t->buffer->offsets_size;
- tr.data.ptr.buffer = (void *)t->buffer->data + proc->user_buffer_offset;
- tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void *));
这里有一个非常重要的地方,是Binder进程间通信机制的精髓所在:
- tr.data.ptr.buffer = (void *)t->buffer->data + proc->user_buffer_offset;
- tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void *));
t->buffer->data所指向的地址是内核空间的,现在要把数据返回给Service
Manager进程的用户空间,而Service
Manager进程的用户空间是不能访问内核空间的数据的,所以这里要作一下处理。怎么处理呢?我们在学面向对象语言的时候,对象的拷贝有深拷贝和浅拷贝
之分,深拷贝是把另外分配一块新内存,然后把原始对象的内容搬过去,浅拷贝是并没有为新对象分配一块新空间,而只是分配一个引用,而个引用指向原始对象。
Binder机制用的是类似浅拷贝的方法,通过在用户空间分配一个虚拟地址,然后让这个用户空间虚拟地址与 t->buffer->data
这个内核空间虚拟地址指向同一个物理地址,这样就可以实现浅拷贝了。怎么样用户空间和内核空间的虚拟地址同时指向同一个物理地址呢?请参考前面一篇文章浅谈Service Manager成为Android进程间通信(IPC)机制Binder守护进程之路,
那里有详细描述。这里只要将t->buffer->data加上一个偏移值proc->user_buffer_offset就可以得
到t->buffer->data对应的用户空间虚拟地址了。调整了tr.data.ptr.buffer的值之后,不要忘记也要一起调整
tr.data.ptr.offsets的值。
接着就是把tr的内容拷贝到用户传进来的缓冲区去了,指针ptr指向这个用户缓冲区的地址:
- if (put_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- if (copy_to_user(ptr, &tr, sizeof(tr)))
- return -EFAULT;
- ptr += sizeof(tr);
这里可以看出,这里只是对作tr.data.ptr.bufferr和tr.data.ptr.offsets的内容作了浅拷贝。
最后,由于已经处理了这个事务,要把它从todo列表中删除:
- list_del(&t->work.entry);
- t->buffer->allow_user_free = 1;
- if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) {
- t->to_parent = thread->transaction_stack;
- t->to_thread = thread;
- thread->transaction_stack = t;
- } else {
- t->buffer->transaction = NULL;
- kfree(t);
- binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++;
- }
注意,这里的cmd == BR_TRANSACTION && !(t->flags &
TF_ONE_WAY)为true,表明这个事务虽然在驱动程序中已经处理完了,但是它仍然要等待Service
Manager完成之后,给驱动程序一个确认,也就是需要等待回复,于是把当前事务t放在thread->transaction_stack队列
的头部:
- t->to_parent = thread->transaction_stack;
- t->to_thread = thread;
- thread->transaction_stack = t;
如果cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)为false,那就不需要等待回复了,直接把事务t删掉。
这个while最后通过一个break跳了出来,最后返回到binder_ioctl函数中:
- static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
- {
- int ret;
- struct binder_proc *proc = filp->private_data;
- struct binder_thread *thread;
- unsigned int size = _IOC_SIZE(cmd);
- void __user *ubuf = (void __user *)arg;
-
- ......
-
- switch (cmd) {
- case BINDER_WRITE_READ: {
- struct binder_write_read bwr;
- if (size != sizeof(struct binder_write_read)) {
- ret = -EINVAL;
- goto err;
- }
- if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
- ret = -EFAULT;
- goto err;
- }
- ......
- if (bwr.read_size > 0) {
- ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
- if (!list_empty(&proc->todo))
- wake_up_interruptible(&proc->wait);
- if (ret < 0) {
- if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
- ret = -EFAULT;
- goto err;
- }
- }
- ......
- if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
- ret = -EFAULT;
- goto err;
- }
- break;
- }
- ......
- default:
- ret = -EINVAL;
- goto err;
- }
- ret = 0;
- err:
- ......
- return ret;
- }
从binder_thread_read返回来后,再看看proc->todo是否还有事务等待处理,如果是,就把睡眠在
proc->wait队列的线程唤醒来处理。最后,把本地变量struct binder_write_read
bwr的内容拷贝回到用户传进来的缓冲区中,就返回了。
这里就是返回到frameworks/base/cmds/servicemanager/binder.c文件中的binder_loop函数了:
- void binder_loop(struct binder_state *bs, binder_handler func)
- {
- int res;
- struct binder_write_read bwr;
- unsigned readbuf[32];
-
- bwr.write_size = 0;
- bwr.write_consumed = 0;
- bwr.write_buffer = 0;
-
- readbuf[0] = BC_ENTER_LOOPER;
- binder_write(bs, readbuf, sizeof(unsigned));
-
- for (;;) {
- bwr.read_size = sizeof(readbuf);
- bwr.read_consumed = 0;
- bwr.read_buffer = (unsigned) readbuf;
-
- res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
-
- if (res < 0) {
- LOGE("binder_loop: ioctl failed (%s)\n", strerror(errno));
- break;
- }
-
- res = binder_parse(bs, 0, readbuf, bwr.read_consumed, func);
- if (res == 0) {
- LOGE("binder_loop: unexpected reply?!\n");
- break;
- }
- if (res < 0) {
- LOGE("binder_loop: io error %d %s\n", res, strerror(errno));
- break;
- }
- }
- }
返回来的数据都放在readbuf中,接着调用binder_parse进行解析:
- int binder_parse(struct binder_state *bs, struct binder_io *bio,
- uint32_t *ptr, uint32_t size, binder_handler func)
- {
- int r = 1;
- uint32_t *end = ptr + (size / 4);
-
- while (ptr < end) {
- uint32_t cmd = *ptr++;
- ......
- case BR_TRANSACTION: {
- struct binder_txn *txn = (void *) ptr;
- if ((end - ptr) * sizeof(uint32_t) < sizeof(struct binder_txn)) {
- LOGE("parse: txn too small!\n");
- return -1;
- }
- binder_dump_txn(txn);
- if (func) {
- unsigned rdata[256/4];
- struct binder_io msg;
- struct binder_io reply;
- int res;
-
- bio_init(&reply, rdata, sizeof(rdata), 4);
- bio_init_from_txn(&msg, txn);
- res = func(bs, txn, &msg, &reply);
- binder_send_reply(bs, &reply, txn->data, res);
- }
- ptr += sizeof(*txn) / sizeof(uint32_t);
- break;
- }
- ......
- default:
- LOGE("parse: OOPS %d\n", cmd);
- return -1;
- }
- }
-
- return r;
- }
首先把从Binder驱动程序读出来的数据转换为一个struct binder_txn结构体,保存在txn本地变量中,struct
binder_txn定义在frameworks/base/cmds/servicemanager/binder.h文件中:
- struct binder_txn
- {
- void *target;
- void *cookie;
- uint32_t code;
- uint32_t flags;
-
- uint32_t sender_pid;
- uint32_t sender_euid;
-
- uint32_t data_size;
- uint32_t offs_size;
- void *data;
- void *offs;
- };
函数中还用到了另外一个数据结构struct binder_io,也是定义在frameworks/base/cmds/servicemanager/binder.h文件中:
- struct binder_io
- {
- char *data;
- uint32_t *offs;
- uint32_t data_avail;
- uint32_t offs_avail;
-
- char *data0;
- uint32_t *offs0;
- uint32_t flags;
- uint32_t unused;
- };
接着往下看,函数调bio_init来初始化reply变量:
- void bio_init(struct binder_io *bio, void *data,
- uint32_t maxdata, uint32_t maxoffs)
- {
- uint32_t n = maxoffs * sizeof(uint32_t);
-
- if (n > maxdata) {
- bio->flags = BIO_F_OVERFLOW;
- bio->data_avail = 0;
- bio->offs_avail = 0;
- return;
- }
-
- bio->data = bio->data0 = data + n;
- bio->offs = bio->offs0 = data;
- bio->data_avail = maxdata - n;
- bio->offs_avail = maxoffs;
- bio->flags = 0;
- }
接着又调用bio_init_from_txn来初始化msg变量:
- void bio_init_from_txn(struct binder_io *bio, struct binder_txn *txn)
- {
- bio->data = bio->data0 = txn->data;
- bio->offs = bio->offs0 = txn->offs;
- bio->data_avail = txn->data_size;
- bio->offs_avail = txn->offs_size / 4;
- bio->flags = BIO_F_SHARED;
- }
最后,真正进行处理的函数是从参数中传进来的函数指针func,这里就是定义在frameworks/base/cmds/servicemanager/service_manager.c文件中的svcmgr_handler函数:
- int svcmgr_handler(struct binder_state *bs,
- struct binder_txn *txn,
- struct binder_io *msg,
- struct binder_io *reply)
- {
- struct svcinfo *si;
- uint16_t *s;
- unsigned len;
- void *ptr;
- uint32_t strict_policy;
-
- if (txn->target != svcmgr_handle)
- return -1;
-
-
-
-
-
- strict_policy = bio_get_uint32(msg);
- s = bio_get_string16(msg, &len);
- if ((len != (sizeof(svcmgr_id) / 2)) ||
- memcmp(svcmgr_id, s, sizeof(svcmgr_id))) {
- fprintf(stderr,"invalid id %s\n", str8(s));
- return -1;
- }
-
- switch(txn->code) {
- ......
- case SVC_MGR_ADD_SERVICE:
- s = bio_get_string16(msg, &len);
- ptr = bio_get_ref(msg);
- if (do_add_service(bs, s, len, ptr, txn->sender_euid))
- return -1;
- break;
- ......
- }
-
- bio_put_uint32(reply, 0);
- return 0;
- }
回忆一下,在BpServiceManager::addService时,传给Binder驱动程序的参数为:
- writeInt32(IPCThreadState::self()->getStrictModePolicy() | STRICT_MODE_PENALTY_GATHER);
- writeString16("android.os.IServiceManager");
- writeString16("media.player");
- writeStrongBinder(new MediaPlayerService());
这里的语句:
- strict_policy = bio_get_uint32(msg);
- s = bio_get_string16(msg, &len);
- s = bio_get_string16(msg, &len);
- ptr = bio_get_ref(msg);
就是依次把它们读取出来了,这里,我们只要看一下bio_get_ref的实现。先看一个数据结构struct binder_obj的定义:
- struct binder_object
- {
- uint32_t type;
- uint32_t flags;
- void *pointer;
- void *cookie;
- };
这个结构体其实就是对应struct flat_binder_obj的。
接着看bio_get_ref实现:
- void *bio_get_ref(struct binder_io *bio)
- {
- struct binder_object *obj;
-
- obj = _bio_get_obj(bio);
- if (!obj)
- return 0;
-
- if (obj->type == BINDER_TYPE_HANDLE)
- return obj->pointer;
-
- return 0;
- }
_bio_get_obj这个函数就不跟进去看了,它的作用就是从binder_io中取得第一个还没取获取过的binder_object。在这个场景
下,就是我们最开始传过来代表MediaPlayerService的flat_binder_obj了,这个原始的flat_binder_obj的
type为BINDER_TYPE_BINDER,binder为指向MediaPlayerService的弱引用的地址。在前面我们说过,在
Binder驱动驱动程序里面,会把这个flat_binder_obj的type改为BINDER_TYPE_HANDLE,handle改为一个句柄
值。这里的handle值就等于obj->pointer的值。
回到svcmgr_handler函数,调用do_add_service进一步处理:
- int do_add_service(struct binder_state *bs,
- uint16_t *s, unsigned len,
- void *ptr, unsigned uid)
- {
- struct svcinfo *si;
-
- if (!ptr || (len == 0) || (len > 127))
- return -1;
-
- if (!svc_can_register(uid, s)) {
- LOGE("add_service(‘%s‘,%p) uid=%d - PERMISSION DENIED\n",
- str8(s), ptr, uid);
- return -1;
- }
-
- si = find_svc(s, len);
- if (si) {
- if (si->ptr) {
- LOGE("add_service(‘%s‘,%p) uid=%d - ALREADY REGISTERED\n",
- str8(s), ptr, uid);
- return -1;
- }
- si->ptr = ptr;
- } else {
- si = malloc(sizeof(*si) + (len + 1) * sizeof(uint16_t));
- if (!si) {
- LOGE("add_service(‘%s‘,%p) uid=%d - OUT OF MEMORY\n",
- str8(s), ptr, uid);
- return -1;
- }
- si->ptr = ptr;
- si->len = len;
- memcpy(si->name, s, (len + 1) * sizeof(uint16_t));
- si->name[len] = ‘\0‘;
- si->death.func = svcinfo_death;
- si->death.ptr = si;
- si->next = svclist;
- svclist = si;
- }
-
- binder_acquire(bs, ptr);
- binder_link_to_death(bs, ptr, &si->death);
- return 0;
- }
这个函数的实现很简单,就是把MediaPlayerService这个Binder实体的引用写到一个struct
svcinfo结构体中,主要是它的名称和句柄值,然后插入到链接svclist的头部去。这样,Client来向Service
Manager查询服务接口时,只要给定服务名称,Service Manger就可以返回相应的句柄值了。
这个函数执行完成后,返回到svcmgr_handler函数,函数的最后,将一个错误码0写到reply变量中去,表示一切正常:
- bio_put_uint32(reply, 0);
svcmgr_handler函数执行完成后,返回到binder_parse函数,执行下面语句:
- binder_send_reply(bs, &reply, txn->data, res);
我们看一下binder_send_reply的实现,从函数名就可以猜到它要做什么了,告诉Binder驱动程序,它完成了Binder驱动程序交给它的任务了。
- void binder_send_reply(struct binder_state *bs,
- struct binder_io *reply,
- void *buffer_to_free,
- int status)
- {
- struct {
- uint32_t cmd_free;
- void *buffer;
- uint32_t cmd_reply;
- struct binder_txn txn;
- } __attribute__((packed)) data;
-
- data.cmd_free = BC_FREE_BUFFER;
- data.buffer = buffer_to_free;
- data.cmd_reply = BC_REPLY;
- data.txn.target = 0;
- data.txn.cookie = 0;
- data.txn.code = 0;
- if (status) {
- data.txn.flags = TF_STATUS_CODE;
- data.txn.data_size = sizeof(int);
- data.txn.offs_size = 0;
- data.txn.data = &status;
- data.txn.offs = 0;
- } else {
- data.txn.flags = 0;
- data.txn.data_size = reply->data - reply->data0;
- data.txn.offs_size = ((char*) reply->offs) - ((char*) reply->offs0);
- data.txn.data = reply->data0;
- data.txn.offs = reply->offs0;
- }
- binder_write(bs, &data, sizeof(data));
- }
从这里可以看出,binder_send_reply告诉Binder驱动程序执行BC_FREE_BUFFER和BC_REPLY命令,前者释放之前在
binder_transaction分配的空间,地址为buffer_to_free,buffer_to_free这个地址是Binder驱动程序把
自己在内核空间用的地址转换成用户空间地址再传给Service
Manager的,所以Binder驱动程序拿到这个地址后,知道怎么样释放这个空间;后者告诉MediaPlayerService,它的
addService操作已经完成了,错误码是0,保存在data.txn.data中。
再来看binder_write函数:
- int binder_write(struct binder_state *bs, void *data, unsigned len)
- {
- struct binder_write_read bwr;
- int res;
- bwr.write_size = len;
- bwr.write_consumed = 0;
- bwr.write_buffer = (unsigned) data;
- bwr.read_size = 0;
- bwr.read_consumed = 0;
- bwr.read_buffer = 0;
- res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
- if (res < 0) {
- fprintf(stderr,"binder_write: ioctl failed (%s)\n",
- strerror(errno));
- }
- return res;
- }
这里可以看出,只有写操作,没有读操作,即read_size为0。
这里又是一个ioctl的BINDER_WRITE_READ操作。直入到驱动程序的binder_ioctl函数后,执行BINDER_WRITE_READ命令,这里就不累述了。
最后,从binder_ioctl执行到binder_thread_write函数,我们首先看第一个命令BC_FREE_BUFFER:
- int
- binder_thread_write(struct binder_proc *proc, struct binder_thread *thread,
- void __user *buffer, int size, signed long *consumed)
- {
- uint32_t cmd;
- void __user *ptr = buffer + *consumed;
- void __user *end = buffer + size;
-
- while (ptr < end && thread->return_error == BR_OK) {
- if (get_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
- binder_stats.bc[_IOC_NR(cmd)]++;
- proc->stats.bc[_IOC_NR(cmd)]++;
- thread->stats.bc[_IOC_NR(cmd)]++;
- }
- switch (cmd) {
- ......
- case BC_FREE_BUFFER: {
- void __user *data_ptr;
- struct binder_buffer *buffer;
-
- if (get_user(data_ptr, (void * __user *)ptr))
- return -EFAULT;
- ptr += sizeof(void *);
-
- buffer = binder_buffer_lookup(proc, data_ptr);
- if (buffer == NULL) {
- binder_user_error("binder: %d:%d "
- "BC_FREE_BUFFER u%p no match\n",
- proc->pid, thread->pid, data_ptr);
- break;
- }
- if (!buffer->allow_user_free) {
- binder_user_error("binder: %d:%d "
- "BC_FREE_BUFFER u%p matched "
- "unreturned buffer\n",
- proc->pid, thread->pid, data_ptr);
- break;
- }
- if (binder_debug_mask & BINDER_DEBUG_FREE_BUFFER)
- printk(KERN_INFO "binder: %d:%d BC_FREE_BUFFER u%p found buffer %d for %s transaction\n",
- proc->pid, thread->pid, data_ptr, buffer->debug_id,
- buffer->transaction ? "active" : "finished");
-
- if (buffer->transaction) {
- buffer->transaction->buffer = NULL;
- buffer->transaction = NULL;
- }
- if (buffer->async_transaction && buffer->target_node) {
- BUG_ON(!buffer->target_node->has_async_transaction);
- if (list_empty(&buffer->target_node->async_todo))
- buffer->target_node->has_async_transaction = 0;
- else
- list_move_tail(buffer->target_node->async_todo.next, &thread->todo);
- }
- binder_transaction_buffer_release(proc, buffer, NULL);
- binder_free_buf(proc, buffer);
- break;
- }
-
- ......
- *consumed = ptr - buffer;
- }
- return 0;
- }
首先通过看这个语句:
- get_user(data_ptr, (void * __user *)ptr)
这个是获得要删除的Buffer的用户空间地址,接着通过下面这个语句来找到这个地址对应的struct binder_buffer信息:
- buffer = binder_buffer_lookup(proc, data_ptr);
因为这个空间是前面在binder_transaction里面分配的,所以这里一定能找到。
最后,就可以释放这块内存了:
- binder_transaction_buffer_release(proc, buffer, NULL);
- binder_free_buf(proc, buffer);
再来看另外一个命令BC_REPLY:
- int
- binder_thread_write(struct binder_proc *proc, struct binder_thread *thread,
- void __user *buffer, int size, signed long *consumed)
- {
- uint32_t cmd;
- void __user *ptr = buffer + *consumed;
- void __user *end = buffer + size;
-
- while (ptr < end && thread->return_error == BR_OK) {
- if (get_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
- binder_stats.bc[_IOC_NR(cmd)]++;
- proc->stats.bc[_IOC_NR(cmd)]++;
- thread->stats.bc[_IOC_NR(cmd)]++;
- }
- switch (cmd) {
- ......
- case BC_TRANSACTION:
- case BC_REPLY: {
- struct binder_transaction_data tr;
-
- if (copy_from_user(&tr, ptr, sizeof(tr)))
- return -EFAULT;
- ptr += sizeof(tr);
- binder_transaction(proc, thread, &tr, cmd == BC_REPLY);
- break;
- }
-
- ......
- *consumed = ptr - buffer;
- }
- return 0;
- }
又再次进入到binder_transaction函数:
- static void
- binder_transaction(struct binder_proc *proc, struct binder_thread *thread,
- struct binder_transaction_data *tr, int reply)
- {
- struct binder_transaction *t;
- struct binder_work *tcomplete;
- size_t *offp, *off_end;
- struct binder_proc *target_proc;
- struct binder_thread *target_thread = NULL;
- struct binder_node *target_node = NULL;
- struct list_head *target_list;
- wait_queue_head_t *target_wait;
- struct binder_transaction *in_reply_to = NULL;
- struct binder_transaction_log_entry *e;
- uint32_t return_error;
-
- ......
-
- if (reply) {
- in_reply_to = thread->transaction_stack;
- if (in_reply_to == NULL) {
- ......
- return_error = BR_FAILED_REPLY;
- goto err_empty_call_stack;
- }
- binder_set_nice(in_reply_to->saved_priority);
- if (in_reply_to->to_thread != thread) {
- .......
- goto err_bad_call_stack;
- }
- thread->transaction_stack = in_reply_to->to_parent;
- target_thread = in_reply_to->from;
- if (target_thread == NULL) {
- return_error = BR_DEAD_REPLY;
- goto err_dead_binder;
- }
- if (target_thread->transaction_stack != in_reply_to) {
- ......
- return_error = BR_FAILED_REPLY;
- in_reply_to = NULL;
- target_thread = NULL;
- goto err_dead_binder;
- }
- target_proc = target_thread->proc;
- } else {
- ......
- }
- if (target_thread) {
- e->to_thread = target_thread->pid;
- target_list = &target_thread->todo;
- target_wait = &target_thread->wait;
- } else {
- ......
- }
-
-
-
- t = kzalloc(sizeof(*t), GFP_KERNEL);
- if (t == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_t_failed;
- }
-
-
- tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
- if (tcomplete == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_tcomplete_failed;
- }
-
- if (!reply && !(tr->flags & TF_ONE_WAY))
- t->from = thread;
- else
- t->from = NULL;
- t->sender_euid = proc->tsk->cred->euid;
- t->to_proc = target_proc;
- t->to_thread = target_thread;
- t->code = tr->code;
- t->flags = tr->flags;
- t->priority = task_nice(current);
- t->buffer = binder_alloc_buf(target_proc, tr->data_size,
- tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
- if (t->buffer == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_alloc_buf_failed;
- }
- t->buffer->allow_user_free = 0;
- t->buffer->debug_id = t->debug_id;
- t->buffer->transaction = t;
- t->buffer->target_node = target_node;
- if (target_node)
- binder_inc_node(target_node, 1, 0, NULL);
-
- offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));
-
- if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
- binder_user_error("binder: %d:%d got transaction with invalid "
- "data ptr\n", proc->pid, thread->pid);
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
- if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
- binder_user_error("binder: %d:%d got transaction with invalid "
- "offsets ptr\n", proc->pid, thread->pid);
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
-
- ......
-
- if (reply) {
- BUG_ON(t->buffer->async_transaction != 0);
- binder_pop_transaction(target_thread, in_reply_to);
- } else if (!(t->flags & TF_ONE_WAY)) {
- ......
- } else {
- ......
- }
- t->work.type = BINDER_WORK_TRANSACTION;
- list_add_tail(&t->work.entry, target_list);
- tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
- list_add_tail(&tcomplete->entry, &thread->todo);
- if (target_wait)
- wake_up_interruptible(target_wait);
- return;
- ......
- }
注意,这里的reply为1,我们忽略掉其它无关代码。
前面Service Manager正在binder_thread_read函数中被MediaPlayerService启动后进程唤醒后,在最后会把当前处理完的事务放在thread->transaction_stack中:
- if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) {
- t->to_parent = thread->transaction_stack;
- t->to_thread = thread;
- thread->transaction_stack = t;
- }
所以,这里,首先是把它这个binder_transaction取回来,并且放在本地变量in_reply_to中:
- in_reply_to = thread->transaction_stack;
接着就可以通过in_reply_to得到最终发出这个事务请求的线程和进程:
- target_thread = in_reply_to->from;
- target_proc = target_thread->proc;
然后得到target_list和target_wait:
- target_list = &target_thread->todo;
- target_wait = &target_thread->wait;
下面这一段代码:
- t = kzalloc(sizeof(*t), GFP_KERNEL);
- if (t == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_t_failed;
- }
-
-
- tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
- if (tcomplete == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_alloc_tcomplete_failed;
- }
-
- if (!reply && !(tr->flags & TF_ONE_WAY))
- t->from = thread;
- else
- t->from = NULL;
- t->sender_euid = proc->tsk->cred->euid;
- t->to_proc = target_proc;
- t->to_thread = target_thread;
- t->code = tr->code;
- t->flags = tr->flags;
- t->priority = task_nice(current);
- t->buffer = binder_alloc_buf(target_proc, tr->data_size,
- tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
- if (t->buffer == NULL) {
- return_error = BR_FAILED_REPLY;
- goto err_binder_alloc_buf_failed;
- }
- t->buffer->allow_user_free = 0;
- t->buffer->debug_id = t->debug_id;
- t->buffer->transaction = t;
- t->buffer->target_node = target_node;
- if (target_node)
- binder_inc_node(target_node, 1, 0, NULL);
-
- offp = (size_t *)(t->buffer->data + ALIGN(tr->data_size, sizeof(void *)));
-
- if (copy_from_user(t->buffer->data, tr->data.ptr.buffer, tr->data_size)) {
- binder_user_error("binder: %d:%d got transaction with invalid "
- "data ptr\n", proc->pid, thread->pid);
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
- if (copy_from_user(offp, tr->data.ptr.offsets, tr->offsets_size)) {
- binder_user_error("binder: %d:%d got transaction with invalid "
- "offsets ptr\n", proc->pid, thread->pid);
- return_error = BR_FAILED_REPLY;
- goto err_copy_data_failed;
- }
我们在前面已经分析过了,这里不再重复。但是有一点要注意的是,这里target_node为NULL,因此,t->buffer->target_node也为NULL。
函数本来有一个for循环,用来处理数据中的Binder对象,这里由于没有Binder对象,所以就略过了。到了下面这句代码:
- binder_pop_transaction(target_thread, in_reply_to);
我们看看做了什么事情:
- static void
- binder_pop_transaction(
- struct binder_thread *target_thread, struct binder_transaction *t)
- {
- if (target_thread) {
- BUG_ON(target_thread->transaction_stack != t);
- BUG_ON(target_thread->transaction_stack->from != target_thread);
- target_thread->transaction_stack =
- target_thread->transaction_stack->from_parent;
- t->from = NULL;
- }
- t->need_reply = 0;
- if (t->buffer)
- t->buffer->transaction = NULL;
- kfree(t);
- binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++;
- }
由于到了这里,已经不需要in_reply_to这个transaction了,就把它删掉。
回到binder_transaction函数:
- t->work.type = BINDER_WORK_TRANSACTION;
- list_add_tail(&t->work.entry, target_list);
- tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
- list_add_tail(&tcomplete->entry, &thread->todo);
和前面一样,分别把t和tcomplete分别放在target_list和thread->todo队列中,这里的target_list指的就
是最初调用IServiceManager::addService的MediaPlayerService的Server主线程的的
thread->todo队列了,而thread->todo指的是Service
Manager中用来回复IServiceManager::addService请求的线程。
最后,唤醒等待在target_wait队列上的线程了,就是最初调用IServiceManager::addService的
MediaPlayerService的Server主线程了,它最后在binder_thread_read函数中睡眠在
thread->wait上,就是这里的target_wait了:
- if (target_wait)
- wake_up_interruptible(target_wait);
这样,Service
Manger回复调用IServiceManager::addService请求就算完成了,重新回到frameworks/base/cmds
/servicemanager/binder.c文件中的binder_loop函数等待下一个Client请求的到来。事实上,Service
Manger回到binder_loop函数再次执行ioctl函数时候,又会再次进入到binder_thread_read函数。这时个会发现
thread->todo不为空,这是因为刚才我们调用了:
- list_add_tail(&tcomplete->entry, &thread->todo);
把一个工作项tcompelete放在了在thread->todo中,这个tcompelete的type为BINDER_WORK_TRANSACTION_COMPLETE,因此,Binder驱动程序会执行下面操作:
- switch (w->type) {
- case BINDER_WORK_TRANSACTION_COMPLETE: {
- cmd = BR_TRANSACTION_COMPLETE;
- if (put_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
-
- list_del(&w->entry);
- kfree(w);
-
- } break;
- ......
- }
binder_loop函数执行完这个ioctl调用后,才会在下一次调用ioctl进入到Binder驱动程序进入休眠状态,等待下一次Client的请求。
上面讲到调用IServiceManager::addService的MediaPlayerService的Server主线程被唤醒了,于是,重新执行binder_thread_read函数:
- static int
- binder_thread_read(struct binder_proc *proc, struct binder_thread *thread,
- void __user *buffer, int size, signed long *consumed, int non_block)
- {
- void __user *ptr = buffer + *consumed;
- void __user *end = buffer + size;
-
- int ret = 0;
- int wait_for_proc_work;
-
- if (*consumed == 0) {
- if (put_user(BR_NOOP, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- }
-
- retry:
- wait_for_proc_work = thread->transaction_stack == NULL && list_empty(&thread->todo);
-
- ......
-
- if (wait_for_proc_work) {
- ......
- } else {
- if (non_block) {
- if (!binder_has_thread_work(thread))
- ret = -EAGAIN;
- } else
- ret = wait_event_interruptible(thread->wait, binder_has_thread_work(thread));
- }
-
- ......
-
- while (1) {
- uint32_t cmd;
- struct binder_transaction_data tr;
- struct binder_work *w;
- struct binder_transaction *t = NULL;
-
- if (!list_empty(&thread->todo))
- w = list_first_entry(&thread->todo, struct binder_work, entry);
- else if (!list_empty(&proc->todo) && wait_for_proc_work)
- w = list_first_entry(&proc->todo, struct binder_work, entry);
- else {
- if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
- goto retry;
- break;
- }
-
- ......
-
- switch (w->type) {
- case BINDER_WORK_TRANSACTION: {
- t = container_of(w, struct binder_transaction, work);
- } break;
- ......
- }
-
- if (!t)
- continue;
-
- BUG_ON(t->buffer == NULL);
- if (t->buffer->target_node) {
- ......
- } else {
- tr.target.ptr = NULL;
- tr.cookie = NULL;
- cmd = BR_REPLY;
- }
- tr.code = t->code;
- tr.flags = t->flags;
- tr.sender_euid = t->sender_euid;
-
- if (t->from) {
- ......
- } else {
- tr.sender_pid = 0;
- }
-
- tr.data_size = t->buffer->data_size;
- tr.offsets_size = t->buffer->offsets_size;
- tr.data.ptr.buffer = (void *)t->buffer->data + proc->user_buffer_offset;
- tr.data.ptr.offsets = tr.data.ptr.buffer + ALIGN(t->buffer->data_size, sizeof(void *));
-
- if (put_user(cmd, (uint32_t __user *)ptr))
- return -EFAULT;
- ptr += sizeof(uint32_t);
- if (copy_to_user(ptr, &tr, sizeof(tr)))
- return -EFAULT;
- ptr += sizeof(tr);
-
- ......
-
- list_del(&t->work.entry);
- t->buffer->allow_user_free = 1;
- if (cmd == BR_TRANSACTION && !(t->flags & TF_ONE_WAY)) {
- ......
- } else {
- t->buffer->transaction = NULL;
- kfree(t);
- binder_stats.obj_deleted[BINDER_STAT_TRANSACTION]++;
- }
- break;
- }
-
- done:
- ......
- return 0;
- }
在while循环中,从thread->todo得到w,w->type为BINDER_WORK_TRANSACTION,于是,得到t。
从上面可以知道,Service
Manager反回了一个0回来,写在t->buffer->data里面,现在把t->buffer->data加上
proc->user_buffer_offset,得到用户空间地址,保存在tr.data.ptr.buffer里面,这样用户空间就可以访问
这个返回码了。由于cmd不等于BR_TRANSACTION,这时就可以把t删除掉了,因为以后都不需要用了。
执行完这个函数后,就返回到binder_ioctl函数,执行下面语句,把数据返回给用户空间:
- if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
- ret = -EFAULT;
- goto err;
- }
接着返回到用户空间IPCThreadState::talkWithDriver函数,最后返回到IPCThreadState::waitForResponse函数,最终执行到下面语句:
- status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
- {
- int32_t cmd;
- int32_t err;
-
- while (1) {
- if ((err=talkWithDriver()) < NO_ERROR) break;
-
- ......
-
- cmd = mIn.readInt32();
-
- ......
-
- switch (cmd) {
- ......
- case BR_REPLY:
- {
- binder_transaction_data tr;
- err = mIn.read(&tr, sizeof(tr));
- LOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY");
- if (err != NO_ERROR) goto finish;
-
- if (reply) {
- if ((tr.flags & TF_STATUS_CODE) == 0) {
- reply->ipcSetDataReference(
- reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
- tr.data_size,
- reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
- tr.offsets_size/sizeof(size_t),
- freeBuffer, this);
- } else {
- ......
- }
- } else {
- ......
- }
- }
- goto finish;
-
- ......
- }
- }
-
- finish:
- ......
- return err;
- }
注意,这里的tr.flags等于0,这个是在上面的binder_send_reply函数里设置的。最终把结果保存在reply了:
- reply->ipcSetDataReference(
- reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
- tr.data_size,
- reinterpret_cast<const size_t*>(tr.data.ptr.offsets),
- tr.offsets_size/sizeof(size_t),
- freeBuffer, this);
这个函数我们就不看了,有兴趣的读者可以研究一下。
从这里层层返回,最后回到MediaPlayerService::instantiate函数中。
至此,IServiceManager::addService终于执行完毕了。这个过程非常复杂,但是如果我们能够深刻地理解这一过程,将能很好地理解
Binder机制的设计思想和实现过程。这里,对IServiceManager::addService过程中MediaPlayerService、
ServiceManager和BinderDriver之间的交互作一个小结:

回到frameworks/base/media/mediaserver/main_mediaserver.cpp文件中的main函数,接下去还要执行下面两个函数:
- ProcessState::self()->startThreadPool();
- IPCThreadState::self()->joinThreadPool();
首先看ProcessState::startThreadPool函数的实现:
- void ProcessState::startThreadPool()
- {
- AutoMutex _l(mLock);
- if (!mThreadPoolStarted) {
- mThreadPoolStarted = true;
- spawnPooledThread(true);
- }
- }
这里调用spwanPooledThread:
- void ProcessState::spawnPooledThread(bool isMain)
- {
- if (mThreadPoolStarted) {
- int32_t s = android_atomic_add(1, &mThreadPoolSeq);
- char buf[32];
- sprintf(buf, "Binder Thread #%d", s);
- LOGV("Spawning new pooled thread, name=%s\n", buf);
- sp<Thread> t = new PoolThread(isMain);
- t->run(buf);
- }
- }
这里主要是创建一个线程,PoolThread继续Thread类,Thread类定义在frameworks/base/libs/utils
/Threads.cpp文件中,其run函数最终调用子类的threadLoop函数,这里即为PoolThread::threadLoop函数:
- virtual bool threadLoop()
- {
- IPCThreadState::self()->joinThreadPool(mIsMain);
- return false;
- }
这里和frameworks/base/media/mediaserver/main_mediaserver.cpp文件中的main函数一样,最终
都是调用了IPCThreadState::joinThreadPool函数,它们的区别是,一个参数是true,一个是默认值false。我们来看一
下这个函数的实现:
- void IPCThreadState::joinThreadPool(bool isMain)
- {
- LOG_THREADPOOL("**** THREAD %p (PID %d) IS JOINING THE THREAD POOL\n", (void*)pthread_self(), getpid());
-
- mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
-
- ......
-
- status_t result;
- do {
- int32_t cmd;
-
- .......
-
-
- result = talkWithDriver();
- if (result >= NO_ERROR) {
- size_t IN = mIn.dataAvail();
- if (IN < sizeof(int32_t)) continue;
- cmd = mIn.readInt32();
- ......
- }
-
- result = executeCommand(cmd);
- }
-
- ......
- } while (result != -ECONNREFUSED && result != -EBADF);
-
- .......
-
- mOut.writeInt32(BC_EXIT_LOOPER);
- talkWithDriver(false);
- }
这个函数最终是在一个无穷循环中,通过调用talkWithDriver函数来和Binder驱动程序进行交互,实际上就是调用
talkWithDriver来等待Client的请求,然后再调用executeCommand来处理请求,而在executeCommand函数中,
最终会调用BBinder::transact来真正处理Client的请求:
- status_t IPCThreadState::executeCommand(int32_t cmd)
- {
- BBinder* obj;
- RefBase::weakref_type* refs;
- status_t result = NO_ERROR;
-
- switch (cmd) {
- ......
-
- case BR_TRANSACTION:
- {
- binder_transaction_data tr;
- result = mIn.read(&tr, sizeof(tr));
-
- ......
-
- Parcel reply;
-
- ......
-
- if (tr.target.ptr) {
- sp<BBinder> b((BBinder*)tr.cookie);
- const status_t error = b->transact(tr.code, buffer, &reply, tr.flags);
- if (error < NO_ERROR) reply.setError(error);
-
- } else {
- const status_t error = the_context_object->transact(tr.code, buffer, &reply, tr.flags);
- if (error < NO_ERROR) reply.setError(error);
- }
-
- ......
- }
- break;
-
- .......
- }
-
- if (result != NO_ERROR) {
- mLastError = result;
- }
-
- return result;
- }
接下来再看一下BBinder::transact的实现:
- status_t BBinder::transact(
- uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
- {
- data.setDataPosition(0);
-
- status_t err = NO_ERROR;
- switch (code) {
- case PING_TRANSACTION:
- reply->writeInt32(pingBinder());
- break;
- default:
- err = onTransact(code, data, reply, flags);
- break;
- }
-
- if (reply != NULL) {
- reply->setDataPosition(0);
- }
-
- return err;
- }
最终会调用onTransact函数来处理。在这个场景中,BnMediaPlayerService继承了BBinder类,并且重载了
onTransact函数,因此,这里实际上是调用了BnMediaPlayerService::onTransact函数,这个函数定义在
frameworks/base/libs/media/libmedia/IMediaPlayerService.cpp文件中:
- status_t BnMediaPlayerService::onTransact(
- uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
- {
- switch(code) {
- case CREATE_URL: {
- ......
- } break;
- case CREATE_FD: {
- ......
- } break;
- case DECODE_URL: {
- ......
- } break;
- case DECODE_FD: {
- ......
- } break;
- case CREATE_MEDIA_RECORDER: {
- ......
- } break;
- case CREATE_METADATA_RETRIEVER: {
- ......
- } break;
- case GET_OMX: {
- ......
- } break;
- default:
- return BBinder::onTransact(code, data, reply, flags);
- }
- }
至此,我们就以MediaPlayerService为例,完整地介绍了Android系统进程间通信Binder机制中的Server启动过程。
Server启动起来之后,就会在一个无穷循环中等待Client的请求了。在下一篇文章中,我们将介绍Client如何通过Service
Manager远程接口来获得Server远程接口,进而调用Server远程接口来使用Server提供的服务,敬请关注。
老罗的新浪微博:http://weibo.com/shengyangluo,欢迎关注!
Android系统进程间通信(IPC)机制Binder中的Server启动过程源代码分析
标签:des android blog http io ar os 使用 sp
原文地址:http://www.cnblogs.com/Free-Thinker/p/4142093.html