标签:style blog class c code tar
《30天自制操作系统》笔记(02)——导入C语言
在上一篇,记录了计算机开机时加载IPL程序(initial program loader,一个nas汇编程序)的情况,包括IPL代码(helloos.nas)、编译生成helloos.img文件、用虚拟机QEMU加载helloos.img、制作U盘启动盘和用物理机加载helloos.img。
计算机启动时会自动加载和执行IPL程序,但IPL程序只能占用512字节。若直接用IPL写OS,空间不够用。所以IPL程序一般用于将真正的OS程序加载到内存某处(记作A),然后跳转到A。这样计算机就可以执行OS的程序了。
在上一篇中的IPL程序只是个hello world式的试验品,本篇通过修改上一篇的IPL,让它真正实现加载OS程序的功能。同时,将IPL程序代码和OS代码放到不同的源代码文件中;用C语言来编写以后的OS代码;用Makefile来编译源代码。
有了本篇的基础,就算是正式开始编写OS源代码了。
一张软盘有80个柱面、2个磁头、18个扇区(Cylinder:0~79;Header:0~2;Sector:1~18),1个扇区有512个字节,所以软盘的容量是80*2*18*512=1440KB。
向一个软盘保存文件时,文件名会从0x2600开始往后存,文件的内容会从0x4200开始往后存。
1. 把IPL程序作为一个独立的源文件(ipl10.nas)开发,编译后生成二进制文件(ipl10.bin)。
2. 把OS程序作为若干独立的源文件开发,编译后生成二进制文件(haribote.sys)。haribote.sys就是我们的OS程序。
3. 用二进制的方式把ipl10.bin写入haribote.img(磁盘映像文件,看作一个软盘即可)的第一个扇区(这样,计算机启动时就会自动加载ipl10.bin程序)。
4. 把haribote.sys作为一个文件复制到haribote.img。根据上文的预备知识可知,这个文件的内容会从软盘的0x4200位置开始往后存。
下面的代码是完备的IPL程序,它读了10个柱面上的代码到内存,所以文件名从helloos.nas改成了ipl10.nas。

1 ; haribote-ipl 2 ; TAB=4 3 4 CYLS EQU 10 ; どこまで読み込むか 5 6 ORG 0x7c00 ; 指明程序的装载地址 7 8 ; 以下这段是标准FAT32格式软盘专用的代码 9 10 JMP entry 11 DB 0x90 12 DB "HARIBOTE" ; freeparam 启动区的名称可以是任意的字符串(8字节) 13 DW 512 ; 每个扇区(sector)的大小(必须为512字节) 14 DB 1 ; 簇(cluster)的大小(必须为1个扇区) 15 DW 1 ; FAT的起始位置(一般从第一个扇区开始) 16 DB 2 ; FAT的个数(必须为2) 17 DW 224 ; 根目录的大小(一般设成224项) 18 DW 2880 ; 该磁盘的大小(必须是2880扇区) 19 DB 0xf0 ; 磁盘的种类(必须是0xf0) 20 DW 9 ; FAT的长度(必须是9扇区) 21 DW 18 ; 1个磁道(track)有几个扇区(必须是18) 22 DW 2 ; 磁头数(必须是2) 23 DD 0 ; 不使用分区,必须是0 24 DD 2880 ; 重写一次磁盘大小 25 DB 0,0,0x29 ; 意义不明,固定 26 DD 0xffffffff ; (可能是)卷标号码 27 DB "HARIBOTEOS " ; freeparam 磁盘的名称(11字节) 28 DB "FAT12 " ; 磁盘格式名称(8字节) 29 RESB 18 ; 先空出18字节 30 31 ; 程序核心 32 33 entry: 34 MOV AX,0 ; 初始化寄存器 35 MOV SS,AX 36 MOV SP,0x7c00 37 MOV DS,AX 38 39 ; 读磁盘 40 41 MOV AX,0x0820 42 MOV ES,AX 43 MOV CH,0 ; 柱面0 44 MOV DH,0 ; 磁头0 45 MOV CL,2 ; 扇区2 46 readloop: 47 MOV SI,0 ; 记录失败次数的寄存器 48 retry: 49 MOV AH,0x02 ; AH=0x02 : 读入磁盘 50 MOV AL,1 ; 1个扇区 51 MOV BX,0 52 MOV DL,0x00 ; A驱动器 53 INT 0x13 ; 调用磁盘BIOS 54 JNC next ; 没出错时跳转到next 55 ADD SI,1 ; SI加1 56 CMP SI,5 ; 比较SI与5 57 JAE error ; SI >= 5时,跳转到 error 58 MOV AH,0x00 59 MOV DL,0x00 ; A驱动器 60 INT 0x13 ; 重置驱动器 61 JMP retry 62 next: 63 MOV AX,ES ; 把内存地址后移0x200(0x200 = 512) 64 ADD AX,0x0020 ; ADD AX, 512 / 16 65 MOV ES,AX ; 因为没有ADD ES,0x020 指令,所以这里稍微绕个弯 66 ADD CL,1 ; CL加1 67 CMP CL,18 ; 比较CL与18 68 JBE readloop ; 如果CL <= 18,则跳转到readloop 69 MOV CL,1 70 ADD DH,1 71 CMP DH,2 72 JB readloop ; 如果DH < 2,则跳转到readloop 73 MOV DH,0 74 ADD CH,1 75 CMP CH,CYLS 76 JB readloop ; 如果CH < CYLS,则跳转到readloop 77 78 ; 读完所有数据后,调到0x8200位置,即haribote.sys中的指令 79 80 MOV [0x0ff0],CH ; 将CYLS的值写到内存地址0x0ff0中。 81 JMP 0xc200 82 83 error: 84 MOV SI,msg 85 putloop: 86 MOV AL,[SI] 87 ADD SI,1 ; 给SI加1 88 CMP AL,0 89 JE fin 90 MOV AH,0x0e ; 显示一个文字 91 MOV BX,15 ; 指定字符颜色 92 INT 0x10 ; 调用显卡BIOS 93 JMP putloop 94 fin: 95 HLT ; 让CPU停止;等待指令 96 JMP fin ; 无限循环 97 msg: 98 DB 0x0a, 0x0a ; 换行2次 99 DB "load error" ; freeparam 100 DB 0x0a ; 换行 101 DB 0 102 103 RESB 0x7dfe-$ ; 填写0x00,直到0x001fe 104 105 DB 0x55, 0xaa
简单地说,这个ipl10.nas读了软盘(U盘)最开始的10个柱面,即C0-H0-S1到C9-H1-S18。那么从软盘(U盘)读到的这些内容放到哪里了呢?答:放到了内存的0x8000到0x34FFF这一段空间,如下表所示。
|
序号 |
软盘(U盘)位置 |
内存位置 |
备注 |
|
1 |
C0-H0-S1 |
0x8000~0x81FF |
实际上没有读这一扇区,这一扇区存的是IPL程序 |
|
2 |
C0-H0-S2 |
0x8200~0x83FF |
从软盘(U盘)的512字节到内存的512字节的一一对应。 |
|
3 |
C0-H0-S3 |
0x8400~0x85FF |
同上 |
|
…… |
…… |
…… |
…… |
|
360(10*2*18) |
C9-H1-S18 |
0x34E00~0x34FFF |
同上 |
从刚刚的软盘预备知识中可知,haribote.sys程序会被加载到内存的(0x8000+0x4200=0xc200)处。所以IPL程序中会有"JMP 0xc200"这一行代码。这行代码的意思是:把10个柱面读到内存后,haribote.sys就准备好了,IPL可以功成身退。下一步就从haribote.sys的第一句指令开始运行我们的OS。
我们的目的是用C语言写OS,所以当前给出如下几个OS源代码文件。
|
源代码文件 |
功能 |
|
asmhead.nas |
承接IPL程序,调用bootpack.c中的主函数 |
|
bootpack.c |
OS程序主函数 |
|
naskfunc.nas |
用汇编语言写一些供C语言调用的函数 |
下面分别列出这三个源代码文件的内容。
源代码asmhead.nas中用日语注释的地方是原作者在后续章节中解释的,现在我也不知道是什么意思。我只知道asmhead.nas起了一个承上启下的作用,以后就可以越来越多得用C来干活了。
1 ; haribote-os boot asm 2 ; TAB=4 3 4 BOTPAK EQU 0x00280000 ; bootpackのロード先 5 DSKCAC EQU 0x00100000 ; ディスクキャッシュの場所 6 DSKCAC0 EQU 0x00008000 ; ディスクキャッシュの場所(リアルモード) 7 8 ; 有关BOOT_INFO 9 CYLS EQU 0x0ff0 ; 设定启动区 10 LEDS EQU 0x0ff1 11 VMODE EQU 0x0ff2 ; 关于颜色数目的信息。颜色的位数。 12 SCRNX EQU 0x0ff4 ; 分辨率的X(screen x) 13 SCRNY EQU 0x0ff6 ; 分辨率的Y(screen y) 14 VRAM EQU 0x0ff8 ; 图像缓冲区的开始地址 15 16 ORG 0xc200 ; 这个程序将要被装载到内存的什么地方呢? 17 18 ; 画面モードを設定 19 20 MOV AL,0x13 ; VGA显卡,320x200x8bit彩色 21 MOV AH,0x00 22 INT 0x10 23 MOV BYTE [VMODE],8 ; 记录画面模式 24 MOV WORD [SCRNX],320 25 MOV WORD [SCRNY],200 26 MOV DWORD [VRAM],0x000a0000 27 28 ; 用BIOS取得键盘上各种LED指示灯的状态 29 30 MOV AH,0x02 31 INT 0x16 ; keyboard BIOS 32 MOV [LEDS],AL 33 34 ; PICが一切の割り込みを受け付けないようにする 35 ; AT互換機の仕様では、PICの初期化をするなら、 36 ; こいつをCLI前にやっておかないと、たまにハングアップする 37 ; PICの初期化はあとでやる 38 39 MOV AL,0xff 40 OUT 0x21,AL 41 NOP ; OUT命令を連続させるとうまくいかない機種があるらしいので 42 OUT 0xa1,AL 43 44 CLI ; さらにCPUレベルでも割り込み禁止 45 46 ; CPUから1MB以上のメモリにアクセスできるように、A20GATEを設定 47 48 CALL waitkbdout 49 MOV AL,0xd1 50 OUT 0x64,AL 51 CALL waitkbdout 52 MOV AL,0xdf ; enable A20 53 OUT 0x60,AL 54 CALL waitkbdout 55 56 ; プロテクトモード移行 57 58 [INSTRSET "i486p"] ; 486の命令まで使いたいという記述 59 60 LGDT [GDTR0] ; 暫定GDTを設定 61 MOV EAX,CR0 62 AND EAX,0x7fffffff ; bit31を0にする(ページング禁止のため) 63 OR EAX,0x00000001 ; bit0を1にする(プロテクトモード移行のため) 64 MOV CR0,EAX 65 JMP pipelineflush 66 pipelineflush: 67 MOV AX,1*8 ; 読み書き可能セグメント32bit 68 MOV DS,AX 69 MOV ES,AX 70 MOV FS,AX 71 MOV GS,AX 72 MOV SS,AX 73 74 ; bootpackの転送 75 76 MOV ESI,bootpack ; 転送元 77 MOV EDI,BOTPAK ; 転送先 78 MOV ECX,512*1024/4 79 CALL memcpy 80 81 ; ついでにディスクデータも本来の位置へ転送 82 83 ; まずはブートセクタから 84 85 MOV ESI,0x7c00 ; 転送元 86 MOV EDI,DSKCAC ; 転送先 87 MOV ECX,512/4 88 CALL memcpy 89 90 ; 残り全部 91 92 MOV ESI,DSKCAC0+512 ; 転送元 93 MOV EDI,DSKCAC+512 ; 転送先 94 MOV ECX,0 95 MOV CL,BYTE [CYLS] 96 IMUL ECX,512*18*2/4 ; シリンダ数からバイト数/4に変換 97 SUB ECX,512/4 ; IPLの分だけ差し引く 98 CALL memcpy 99 100 ; asmheadでしなければいけないことは全部し終わったので、 101 ; あとはbootpackに任せる 102 103 ; bootpackの起動 104 105 MOV EBX,BOTPAK 106 MOV ECX,[EBX+16] 107 ADD ECX,3 ; ECX += 3; 108 SHR ECX,2 ; ECX /= 4; 109 JZ skip ; 転送するべきものがない 110 MOV ESI,[EBX+20] ; 転送元 111 ADD ESI,EBX 112 MOV EDI,[EBX+12] ; 転送先 113 CALL memcpy 114 skip: 115 MOV ESP,[EBX+12] ; スタック初期値 116 JMP DWORD 2*8:0x0000001b 117 118 waitkbdout: 119 IN AL,0x64 120 AND AL,0x02 121 JNZ waitkbdout ; ANDの結果が0でなければwaitkbdoutへ 122 RET 123 124 memcpy: 125 MOV EAX,[ESI] 126 ADD ESI,4 127 MOV [EDI],EAX 128 ADD EDI,4 129 SUB ECX,1 130 JNZ memcpy ; 引き算した結果が0でなければmemcpyへ 131 RET 132 ; memcpyはアドレスサイズプリフィクスを入れ忘れなければ、ストリング命令でも書ける 133 134 ALIGNB 16 135 GDT0: 136 RESB 8 ; ヌルセレクタ 137 DW 0xffff,0x0000,0x9200,0x00cf ; 読み書き可能セグメント32bit 138 DW 0xffff,0x0000,0x9a28,0x0047 ; 実行可能セグメント32bit(bootpack用) 139 140 DW 0 141 GDTR0: 142 DW 8*3-1 143 DD GDT0 144 145 ALIGNB 16 146 bootpack:
目前的主函数什么都没有做。
1 /* 告诉C编译器,有一个函数在别的文件里。 */ 2 3 void io_hlt(void); 4 5 /* 是函数声明却不用{}。而用;,这表示的意思是:函数是在别的文件中,你自己找一下吧! */ 6 7 void HariMain(void) 8 { 9 10 fin: 11 io_hlt(); /* 执行naskfunc.nas里的_io_hlt */ 12 goto fin; 13 14 }
这个naskfunc.nas可以说是一个封装硬件供C语言调用的函数库。
1 ; naskfunc 2 ; TAB=4 3 4 [FORMAT "WCOFF"] ; 制作目标文件的模式 5 [BITS 32] ; 制作32位模式用的机器语言 6 7 8 ; 制作目标文件的信息 9 10 [FILE "naskfunc.nas"] ; 源文件名信息 11 12 GLOBAL _io_hlt ; 程序中包含的函数名 13 14 15 ; 以下是实际的函数 16 17 [SECTION .text] ; 目标文件中写了这些后再写程序 18 19 _io_hlt: ; void io_hlt(void); 20 HLT 21 RET
上述的ipl10.nas、asmhead.nas、bootpack.c、naskfunc.nas是如何组合成为一个OS程序的呢?下面的Makefile文件描述了编译流程。
1 TOOLPATH = ../z_tools/ 2 INCPATH = ../z_tools/haribote/ 3 4 MAKE = $(TOOLPATH)make.exe -r 5 NASK = $(TOOLPATH)nask.exe 6 CC1 = $(TOOLPATH)cc1.exe -I$(INCPATH) -Os -Wall -quiet 7 GAS2NASK = $(TOOLPATH)gas2nask.exe -a 8 OBJ2BIM = $(TOOLPATH)obj2bim.exe 9 BIM2HRB = $(TOOLPATH)bim2hrb.exe 10 RULEFILE = $(TOOLPATH)haribote/haribote.rul 11 EDIMG = $(TOOLPATH)edimg.exe 12 IMGTOL = $(TOOLPATH)imgtol.com 13 COPY = copy 14 DEL = del 15 16 # デフォルト動作 17 18 default : 19 $(MAKE) img 20 21 # ファイル生成規則 22 23 ipl10.bin : ipl10.nas Makefile 24 $(NASK) ipl10.nas ipl10.bin ipl10.lst 25 26 asmhead.bin : asmhead.nas Makefile 27 $(NASK) asmhead.nas asmhead.bin asmhead.lst 28 29 bootpack.gas : bootpack.c Makefile 30 $(CC1) -o bootpack.gas bootpack.c 31 32 bootpack.nas : bootpack.gas Makefile 33 $(GAS2NASK) bootpack.gas bootpack.nas 34 35 bootpack.obj : bootpack.nas Makefile 36 $(NASK) bootpack.nas bootpack.obj bootpack.lst 37 38 naskfunc.obj : naskfunc.nas Makefile 39 $(NASK) naskfunc.nas naskfunc.obj naskfunc.lst 40 41 bootpack.bim : bootpack.obj naskfunc.obj Makefile 42 $(OBJ2BIM) @$(RULEFILE) out:bootpack.bim stack:3136k map:bootpack.map 43 bootpack.obj naskfunc.obj 44 # 3MB+64KB=3136KB 45 46 bootpack.hrb : bootpack.bim Makefile 47 $(BIM2HRB) bootpack.bim bootpack.hrb 0 48 49 haribote.sys : asmhead.bin bootpack.hrb Makefile 50 copy /B asmhead.bin+bootpack.hrb haribote.sys 51 52 haribote.img : ipl10.bin haribote.sys Makefile 53 $(EDIMG) imgin:../z_tools/fdimg0at.tek 54 wbinimg src:ipl10.bin len:512 from:0 to:0 55 copy from:haribote.sys to:@: 56 imgout:haribote.img 57 58 # コマンド 59 60 img : 61 $(MAKE) haribote.img 62 63 run : 64 $(MAKE) img 65 $(COPY) haribote.img ..\z_tools\qemu\fdimage0.bin 66 $(MAKE) -C ../z_tools/qemu 67 68 install : 69 $(MAKE) img 70 $(IMGTOL) w a: haribote.img 71 72 clean : 73 -$(DEL) *.bin 74 -$(DEL) *.lst 75 -$(DEL) *.gas 76 -$(DEL) *.obj 77 -$(DEL) bootpack.nas 78 -$(DEL) bootpack.map 79 -$(DEL) bootpack.bim 80 -$(DEL) bootpack.hrb 81 -$(DEL) haribote.sys 82 83 src_only : 84 $(MAKE) clean 85 -$(DEL) haribote.img
通过Makefile,我们可以画出如下所示的编译和部署流程。
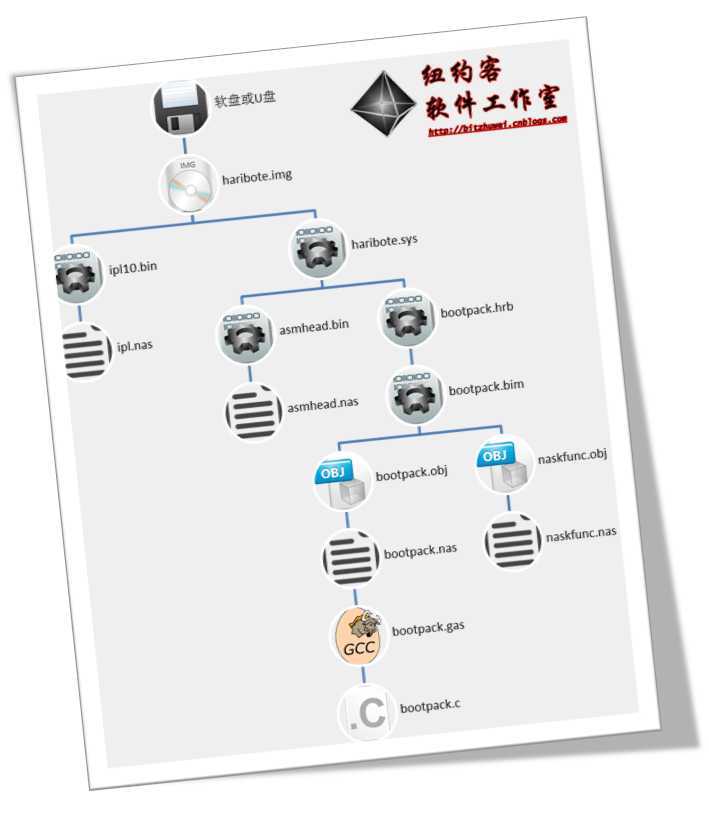
今后开发OS时,就可以直接在bootpack.c中写代码;当遇到C语言无法完成的情况时,就在naskfunc.nas里用汇编语言写函数,然后用bootpack.c调用这些函数。
现在的asmhead.nas程序在计算机启动时将显示器置为全黑,如下图所示。

《30天自制操作系统》笔记(02)——导入C语言,布布扣,bubuko.com
标签:style blog class c code tar
原文地址:http://www.cnblogs.com/bitzhuwei/p/OS-in-30-days-02-use-C-in-OS-implement.html
