标签:
近期被图像切割整的天昏地暗的,在此感谢老朋友周洋给我关于分水岭算法的指点!本来打算等彩色图像切割有个完满的结果再写这篇文章,可是考虑到到了这一步也算是一个阶段,所以打算对图像切割做一个系列的博文,于是先写这篇。
啰嗦了这么多!先看效果:
效果一般,存在着非常多过切割现象,但比没使用滤波之前的效果好非常多,过切割是分水岭算法的通病。这个兴许博文会继续解决。
本文用java实现的是基于自己主动种子区域的分水岭算法,注意本文是基于单色的切割,所以将输入图片首先进行灰度化处理,这个比較简单,不多提了;因此,对于彩色图像,会存在一些偏差,这个在兴许博文里我会去解决。关于分水岭算法的概念,请自行百度,本系列主讲怎样实现以及实现效果。
算法大致分为四步:图像预处理、 种子区域获取、浸水过程(区域增长)、切割结果的合并处理。另外,算法在分水岭过程中的区域表示上,採用并查集的数据结构表示区域块,这样做的优点在于简化生长过程中的合并处理,关于并查集,參见我这篇博文: http://blog.csdn.net/abcd_d_/article/details/40316455。
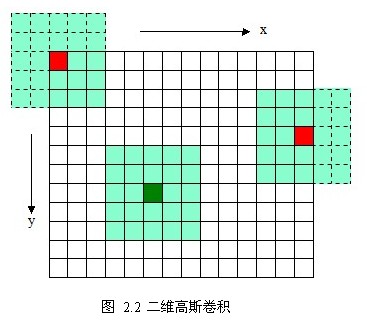
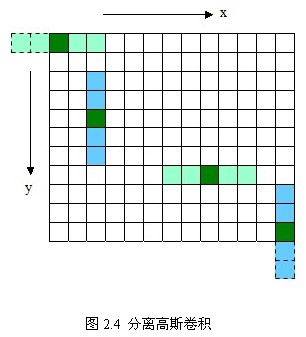
本文採用二维高斯滤波进行图像(sigma=3.0)的平滑操作,经验证去操平滑效果好于中值滤波,读者能够自己实验其他的滤波。另外,为了简化操作,二维高斯模板可近似为两个一维的高斯模板,也就是在下图中,左边的滤波过程近似为右边的滤波过程。
核心代码为:
/**
* * 将图像进行高斯模糊:先利用模糊函数计算高斯模板矩阵,然后进行卷积运算。
*
* @高斯模糊 :高斯模糊是一种图像滤波器,它使用正态分布(高斯函数)计算模糊模板,并使用该模板与原图像做卷积运算,达到模糊图像的目的。
* 在实际应用中,在计算高斯函数的离散近似时,在大概3σ距离之外的像素都能够看作不起作用,这些像素的计算也就能够忽略。
* 通常,图像处理程序仅仅须要计算的矩阵就能够保证相关像素影响。
*
* @param source
* @param index 表示不同的sigma相应的模板
* @return double[][] 模糊后的图像信息矩阵
*/
public static double[][] gaussTran(double[][] source,int index){
int height=source.length;
int width=source[0].length;
///保存高斯过滤后的结果
double[][] result=new double[height][width];
double[] template=GaussTemplate1D.gettemplateX_Y(index);
int tWH=template.length;///模板维数
for(int i=0;i<height;i++){
for(int j=0;j<width;j++){
///进行模糊处理——————卷积运算
double sum=0.0;///卷积结果
for(int m=0;m<tWH;m++){
///计算与模板相应的图像上的位置
int x=j-(int)tWH/2+m;
int y=i;//-(int)tWH/2+m;
//假设模板数据没有超过边界
if(x>=0&&x<width){
sum=sum+source[y][x]*template[m];
}
}
for(int m=0;m<tWH;m++){
///计算与模板相应的图像上的位置
int x=j;
int y=i-(int)tWH/2+m;//-(int)tWH/2+m;
//假设模板数据没有超过边界
if(y>=0&&y<height){
sum=sum+source[y][x]*template[m];
}
}
result[i][j]=sum/2;
}
}
int i=0;
i++;
return result;
}效果为(左边是原图):
首先,获取梯度图像:高斯滤波图像使用sobel算子求取梯度图像。
然后,种子区域获取以及标记:梯度图像中,将梯度值小于预先设置的阈值THRESHOLD的像素点的灰度值设置为0,而其它像素点的灰度值等于其梯度值。这样每个像素都标记之后就開始进行区域增长,採用同一区域属于一个并查集的方法,将灰度值为0的区域进行分类标记(这些信息存储在blockData里)。如图,每个黑色块属于一个类(也就是一个种子区域)。
參照周洋告诉我的方法:三层循环,第一层是梯度值从阈值到最大值,里面两层是二维图像数据的遍历。採用八领域的推断方法,假设某个未被标记为0(未知)的点周围仅仅有一个被标记为零的点(种子),则该点归并到该种子区域中,假设有两个以上被标记的点,而且属于不同的区域,那么该点标记为山脊(轮廓线)。对于外层循环的每个梯度值,区域生长的停止条件:没有新的点被并入到某个区域。这样事实上就有四层循环,由于须要一层来推断是否有新点被并入到种子区域。
效果图例如以下:
能够看出,分水岭算法的优点在于能够得到一个个封闭区域,这个一般的二值化的轮廓图像是得不到的。
另外,经过对照发现,高斯滤波对降低过切割有着比較理想的作用,可是也不能消除过切割,因此须要有第四步——区域合并。这部分在兴许博文中我会继续讲。
由于还未写完,所以代码可能显得比較乱,比方程序中有个map成员变量,实际没多大意义,但考虑到測试用,还望见谅!
附上第一版程序的源代码:http://download.csdn.net/detail/abcd_d_/8169869
标签:
原文地址:http://www.cnblogs.com/gcczhongduan/p/4175093.html



