标签:
在RT-Thread实时操作系统中,任务采用了线程来实现,线程是RT-Thread中最基本的调度单位,它描述了一个任务执行的上下文关系,也描述了这个任务所处的优先等级。重要的任务能拥有相对较高的优先级,非重要的任务优先级可以放低,并且可以类似Linux一样具备分时的效果。线程控制块是操作系统用于控制线程的一个数据结构,它会存放线程的一些信息,例如优先级,线程名称等,也包含线程与线程之间连接用的链表结构,线程等待事件集合等。
1、线程控制块(rtdef.h)
/** * Thread structure */ struct rt_thread { /* rt_object *///这里就是rt_object的结构,其实也可以用rt_object parent来定义,估计线程在早些时候并没有这么做,后来也就没改过来 char name[RT_NAME_MAX]; /**< the name of thread *///对象的名称 rt_uint8_t type; /**< type of object *///对象类型,这里为RT_Object_Class_Thread rt_uint8_t flags; /**< thread‘s flags *///对象标志 #ifdef RT_USING_MODULE void *module_id; /**< id of application module *///线程所在的模块ID #endif rt_list_t list; /**< the object list *///内核对象链表节点
rt_list_t tlist; /**< the thread list *///线程链表,一般用作就绪队列元素节点 /* stack point and entry */ void *sp; /**< stack point *///线程的栈指针,这里主要指静态线程,因为动态线程在堆上分配内存 void *entry; /**< entry *///线程入口函数 void *parameter; /**< parameter *///入口函数对应的参数 void *stack_addr; /**< stack address *///线程栈地址 rt_uint16_t stack_size; /**< stack size *///线程栈大小 /* error code */ rt_err_t error; /**< error code */// 线程错误号,用于IPC机制中,标志是否已经获取成功 rt_uint8_t stat; /**< thread stat *///线程的当前状态,如就绪、挂起等 /* priority */ rt_uint8_t current_priority; /**< current priority *///当前优先级 rt_uint8_t init_priority; /**< initialized priority *///初始优先级 #if RT_THREAD_PRIORITY_MAX > 32 //在rtconfig.h定义最大线程优先级,默认为32,最大值可为256 rt_uint8_t number; //number, high_mask, number_mask与线程调度时获获取当前最高优先级线程的算法有关,这里对算法不做过多解释 rt_uint8_t high_mask; #endif rt_uint32_t number_mask; #if defined(RT_USING_EVENT) //与IPC机制事件相关的一些参数 /* thread event */ rt_uint32_t event_set; //此线程接收到的事件 rt_uint8_t event_info; //此线程的事件过滤信息,用于过滤事件,只保留感兴趣的事件 #endif rt_ubase_t init_tick; /**< thread‘s initialized tick *///线程初始时钟节拍数 rt_ubase_t remaining_tick; /**< remaining tick *///线程当次运行剩余时钟节拍数,线程运行时,每隔1个tick,init_tick减1。 struct rt_timer thread_timer; /**< built-in thread timer *///线程定时器 void (*cleanup)(struct rt_thread *tid); /**< cleanup function when thread exit *///当线程退出时,需要执行的清理函数,相当于线程的析构函数,用于销毁线程时做些后续操作 rt_uint32_t user_data; /**< private user data beyond this thread *///用户数据 }; typedef struct rt_thread *rt_thread_t;
2、线程相关接口
静态线程初始化:静态线程是指,线程控制块、线程运行栈一般都设置为全局变量,在编译时就被确定、被分配处理,内核不负责动态分配内存空间。需要注意的是,用户提供的栈首地址需做系统字节对齐。 rt_err_t rt_thread_init(struct rt_thread *thread,//线程句柄 const char *name,//线程名称,最大长度由rtconfig.h中定义的RT_NAME_MAX宏指定,多余部分会被自动截掉 void (*entry)(void *parameter),//线程入口函数 void *parameter,//线程入口函数参数 void *stack_start,//线程栈起始地址 rt_uint32_t stack_size,//线程栈大小,单位是字节 rt_uint8_t priority,//线程的优先级。优先级范围根据系统配置情况(rtconfig.h中的RT_THREAD_PRIORITY_MAX宏定义),如果支持的是256级优先级,那么范围是从0 ~ 255,数值越小优先级越高,0代表最高优先级。 rt_uint32_t tick)//线程的时间片大小。时间片(tick)的单位是操作系统的时钟节拍。当系统中存在相同优先级线程时,这个参数指定线程一次调度能够运行的最大时间长度。这个时间片运行结束时,调度器自动选择下一个就绪态的同优先级线程进行运行。
动态线程创建:调用这个函数时,系统会从动态堆内存中分配一个线程句柄(即TCB,线程控制块)以及按照参数中指定的栈大小从动态堆内存中分配相应的空间。分配出来的栈空间是按照rtconfig.h中配置RT_ALIGN_SIZE方式对齐。 rt_thread_t rt_thread_create(const char *name,//线程名称,最大长度由rtconfig.h中定义的RT_NAME_MAX宏指定,多余部分会被自动截掉 void (*entry)(void *parameter),//线程入口函数 void *parameter,//线程入口函数参数 rt_uint32_t stack_size,//线程堆大小,单位是字节 rt_uint8_t priority,//线程的优先级。优先级范围根据系统配置情况(rtconfig.h中的RT_THREAD_PRIORITY_MAX宏定义),如果支持的是256级优先级,那么范围是从0 ~ 255,数值越小优先级越高,0代表最高优先级。 rt_uint32_t tick)//线程的时间片大小。时间片(tick)的单位是操作系统的时钟节拍。当系统中存在相同优先级线程时,这个参数指定线程一次调度能够运行的最大时间长度。这个时间片运行结束时,调度器自动选择下一个就绪态的同优先级线程进行运行。
线程脱离:而rt_thread_detach()函数操作的对象是使用rt_thread_init()函数初始化的静态线程控制块。线程本身不应调用这个接口脱离线程本身。
rt_err_t rt_thread_detach(rt_thread_t thread);
线程删除:在动态线程运行完成或自动结束的情况下,系统会自动删除线程,不需要再调用rt_thread_delete()函数接口。这个接口不应由线程本身来调用以删除线程自身,一般只能由其他线程调用或在定时器超时函数中调用。
rt_err_t rt_thread_delete(rt_thread_t thread);
调用该函数后,线程对象将会被移出线程队列并且从内核对象管理器中删除,线程占用的堆栈空间也会被释放,收回的空间将重新用于其他的内存分配。 实际上,用rt_thread_delete函数删除线程接口,仅仅是把相应的线程状态更改为RT_THREAD_CLOSE状态,然后放入到rt_thread_defunct队列中;而真正的删除动作(释放线程控制块和释放线程栈)需要到下一次执行idle线程时,由idle线程完成最后的线程删除动作。
线程启动:创建(初始化)的线程对象的状态处于初始态,并未进入就绪线程的调度队列,我们可以调用下面的函数接口启动一个线程:
rt_err_t rt_thread_startup(rt_thread_t thread);
当调用这个函数时,将把线程的状态更改为就绪状态,并放到相应优先级队列中等待调度。如果新启动的线程优先级比当前线程优先级高,将立刻切换到这个线程。
线程挂起:当线程调用rt_thread_delay,调用线程将主动挂起,当调用rt_sem_take,rt_mb_recv等函数时,资源不可使用也将导致调用线程挂起。处于挂起状态的线程,如果其等待的资源超时(超过其设定的等待时间),那么该线程将不再等待这些资源,并返回到就绪状态;或者,当其它线程释放掉该线程所等待的资源时,该线程也会返回到就绪状态。
rt_err_t rt_thread_suspend(rt_thread_t thread);
通常不应该使用这个函数来挂起线程本身,如果确实需要采用rt_thread_suspend函数挂起当前任务,需要在调用rt_thread_suspend()函数后立刻调用rt_schedule()函数进行手动的线程上下文切换。
线程恢复:线程恢复就是让挂起的线程重新进入就绪状态,如果被恢复线程在所有就绪态线程中,位于最高优先级链表的第一位,那么系统将进行线程上下文的切换。
rt_err_t rt_thread_resume(rt_thread_t thread);
线程让出:当前线程的时间片用完或者该线程自动要求让出处理器资源时,它不再占有处理器,调度器会选择下一个最高优先级的线程执行。这时,放弃处理器资源的线程仍然在就绪队列中。 rt_err_t rt_thread_yield(void); 调用该函数后,当前线程首先把自己从它所在的队列中删除,然后把自己挂到与该线程优先级对应的就绪线程链表的尾部,然后激活调度器切换到优先级最高的线程。
注:rt_thread_yield()函数和rt_schedule()函数比较相像,但在有相同优先级的其他就绪态线程存在时,系统的行为却完全不一样。
执行rt_thread_yield()函数后,将当前线程被换出,把相同优先级的下一个就绪线程将被执行。
执行rt_schedule()函数后,当前线程并不一定被换出,即使被换出,也不会被放到绪线程链表的尾部,而是在系统中选取就绪的优先级最高的线程执行(如果系统中没有比当前线程优先级更高的线程存在,那么执行完rt_schedule()函数后,系 统将继续执行当前线程)
线程睡眠:在实际应用中,我们有时需要让运行的当前线程延迟一段时间,在指定的时间到达后重新运行,这就叫做“线程睡眠”。
rt_err_t rt_thread_sleep(rt_tick_t tick);
rt_err_t rt_thread_delay(rt_tick_t tick);
这两个函数接口的作用相同,调用它们可以使当前线程挂起一段指定的时间,当这个时间过后,线程会被唤醒并再次进入就绪状态。这个函数接受一个参数,该参数指定了线程的休眠时间(单位是OS Tick时钟节拍)。
线程控制: rt_err_t rt_thread_control(rt_thread_t thread, rt_uint8_t cmd, void *arg); 指示控制命令cmd当前支持的命令包括 • RT_THREAD_CTRL_CHANGE_PRIORITY - 动态更改线程的优先级; • RT_THREAD_CTRL_STARTUP - 开始运行一个线程,等同于rt_thread_startup()函数调用; • RT_THREAD_CTRL_CLOSE - 关闭一个线程,等同于rt_thread_delete()函数调用。 查找线程: rt_thread_t rt_thread_find(char *name); 查找线程是通过内核对象管理系统来查找的,根据内核对象的类型,找到相应内核对象链表,并遍历它,比较名字,如果找到则返回。
当前线程:在程序的运行过程中,相同的一段代码可能会被多个线程执行,在执行的时候可以通过下面的函数接口获得当前执行的线程句柄
rt_thread_t rt_thread_self(void);
请不要在中断服务程序中调用此函数,因为它并不能准确获得当前的执行线程。当调度器未启动时,这个接口返回RT_NULL
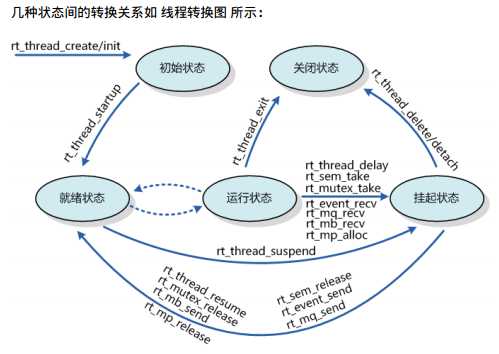
3、线程状态
线程运行的过程中,一个时间内只允许一个线程在处理器中运行,从运行的过程上划分,线程有多种不同的运行状态,如运行态,非运行态等。在RT-Thread实时操作系统中,线程包含五种状态,操作系统会自动根据它运行的情况而动态调整它的状态。 RT-Thread中的五种线程状态如下所示:
RT_THREAD_INIT 线程初始状态。当线程刚开始创建还没开始运行时就处于这个 状态;在这个状态下,线程不参与调度
RT_THREAD_SUSPEND 挂起态、阻塞态。线程此时被挂起:它可能因为资源不可用而 挂起等待;或线程主动延时一段时间而被挂起。在这个状态下 ,线程不参与调度
RT_THREAD_READY 就绪态。线程正在运行;或当前线程运行完让出处理器后,操 作系统寻找最高优先级的就绪态线程运行
RT_THREAD_RUNNING 运行态。线程当前正在运行,在单核系统中,只有rt_thread_self()函数返回的线程处于这个状态;在多核系统中则不受这个限制。
RT_THREAD_CLOSE 线程结束态。当线程运行结束时将处于这个状态。这个状态的 线程不参与线程的调度。
标签:
原文地址:http://www.cnblogs.com/King-Gentleman/p/4276055.html