标签:
摘要

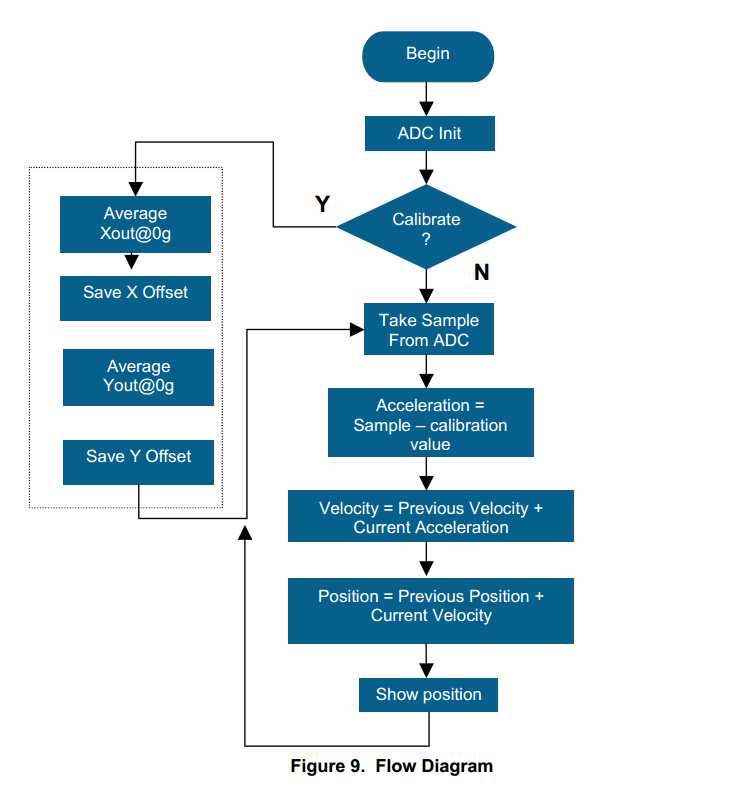
1 voidCalibrate(void) 2 { 3 unsignedint count1; 4 count1 =0; 5 do{ 6 ADC_GetAllAxis(); 7 sstatex = sstatex +Sample_X;// Accumulate Samples 8 sstatey = sstatey +Sample_Y; 9 count1++; 10 }while(count1!=0x0400);// 1024 times 11 sstatex=sstatex>>10;// division between 1024 12 sstatey=sstatey>>10; 13 }
1 do{ 2 accelerationx[1]=accelerationx[1]+Sample_X;//filtering routine for noise attenuation 3 accelerationy[1]=accelerationy[1]+Sample_Y;//64 samples are averaged. The resulting 4 count2++;// average represents the acceleration of 5 // an instant. 6 }while(count2!=0x40);// 64 sums of the acceleration sample 7 accelerationx[1]= accelerationx[1]>>6;// division by 64 8 accelerationy[1]= accelerationy[1]>>6;
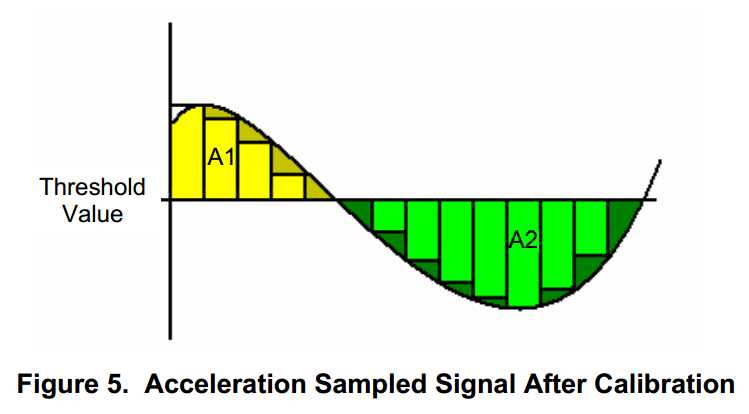
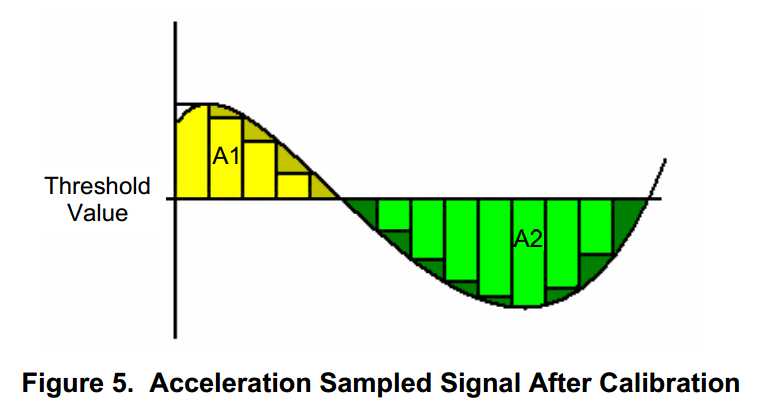
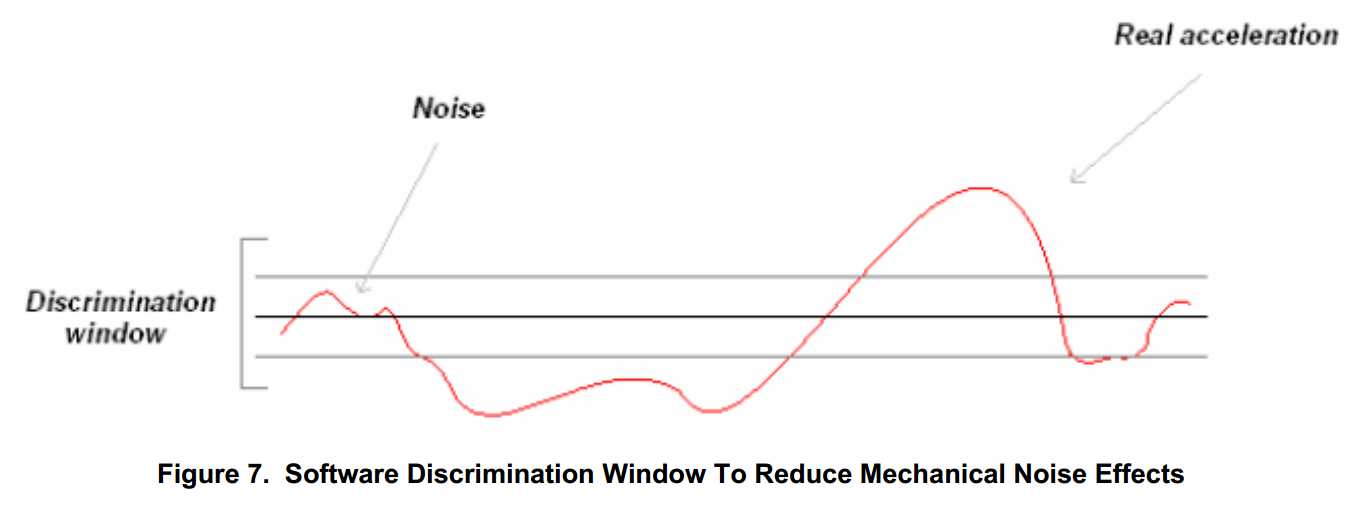
1 if ((accelerationx[1] <=3)&&(accelerationx[1] >= -3)) //Discrimination window applied to 2 { 3 accelerationx[1] = 0; 4 } // the X axis acceleration variable
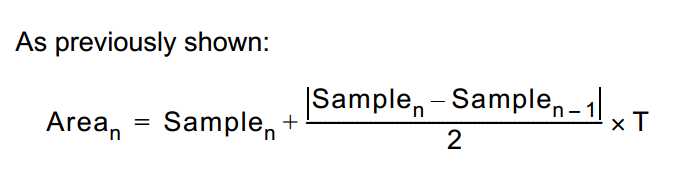
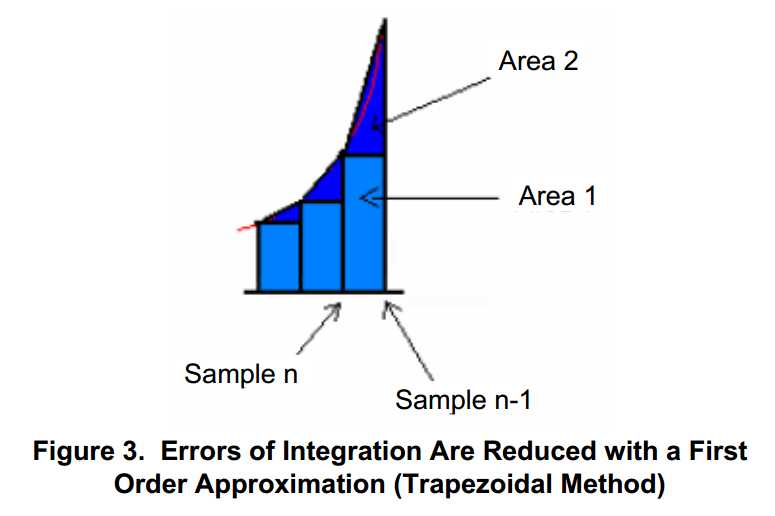
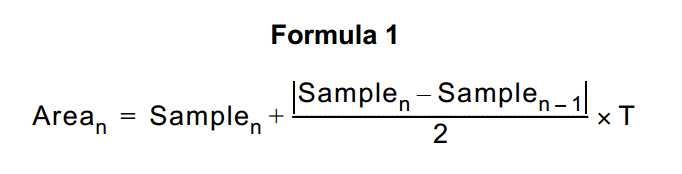
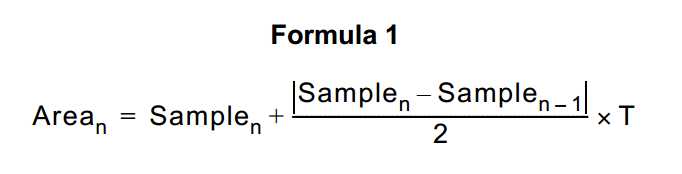
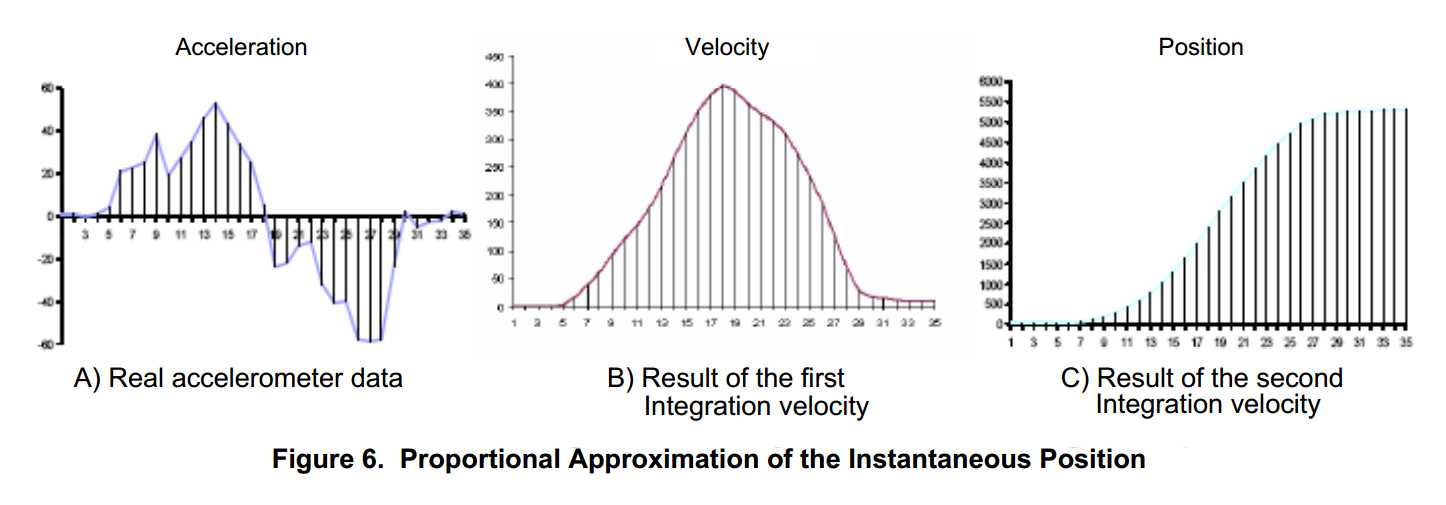
1 //first integration 2 velocityx[1]= velocityx[0]+ accelerationx[0]+((accelerationx[1]- accelerationx[0])>>1) 3 //second integration 4 positionX[1]= positionX[0]+ velocityx[0]+((velocityx[1]- velocityx[0])>>1);
1 if (positionX[1]>=0) 2 { //This line compares the sign of the X direction data 3 direction= (direction | 0x10); // if its positive the most significant byte 4 posx_seg[0]= positionX[1] & 0x000000FF; // is set to 1 else it is set to 8 5 posx_seg[1]= (positionX[1]>>8) & 0x000000FF; // the data is also managed in the 6 // subsequent lines in order to be sent. 7 posx_seg[2]= (positionX[1]>>16) & 0x000000FF;// The 32 bit variable must be split into 8 posx_seg[3]= (positionX[1]>>24) & 0x000000FF;// 4 different 8 bit variables in order to 9 // be sent via the 8 bit SCI frame 10 } 11 else 12 { 13 direction=(direction | 0x80); 14 positionXbkp=positionX[1]-1; 15 positionXbkp=positionXbkp^0xFFFFFFFF; 16 posx_seg[0]= positionXbkp & 0x000000FF; 17 posx_seg[1]= (positionXbkp>>8) & 0x000000FF; 18 posx_seg[2]= (positionXbkp>>16) & 0x000000FF; 19 posx_seg[3]= (positionXbkp>>24) & 0x000000FF; 20 }
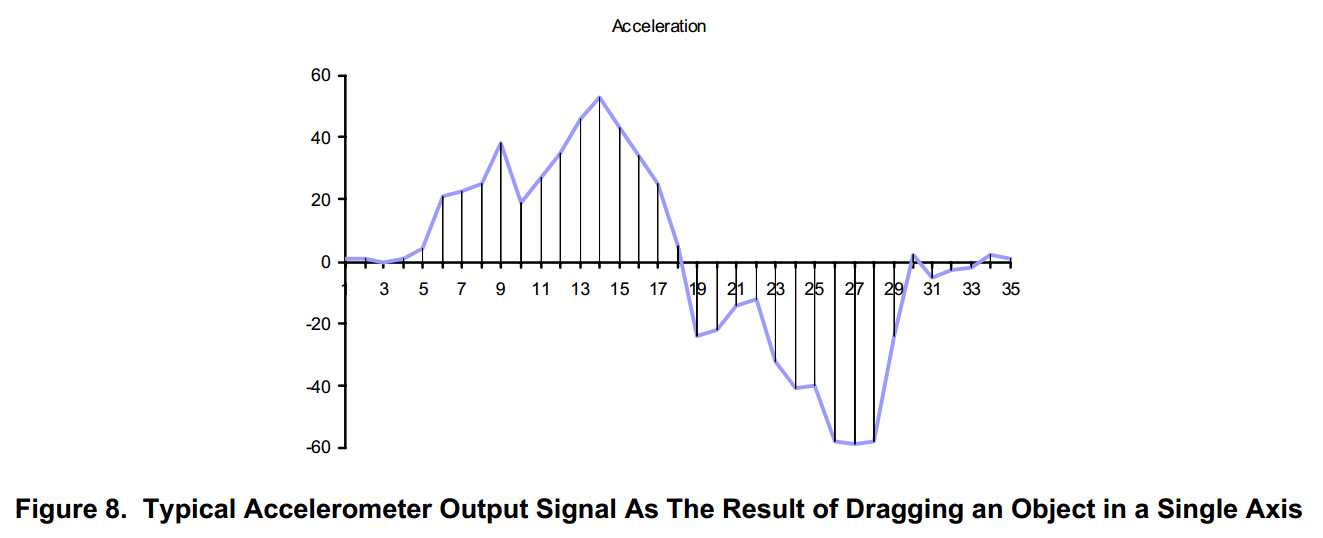
1 if (accelerationx[1]==0) // we count the number of acceleration samples that equals zero 2 { 3 countx++; 4 } 5 else 6 { 7 countx =0; 8 } 9 if (countx>=25) // if this number exceeds 25, we can assume that velocity is zero 10 { 11 velocityx[1]=0; 12 velocityx[0]=0; 13 }

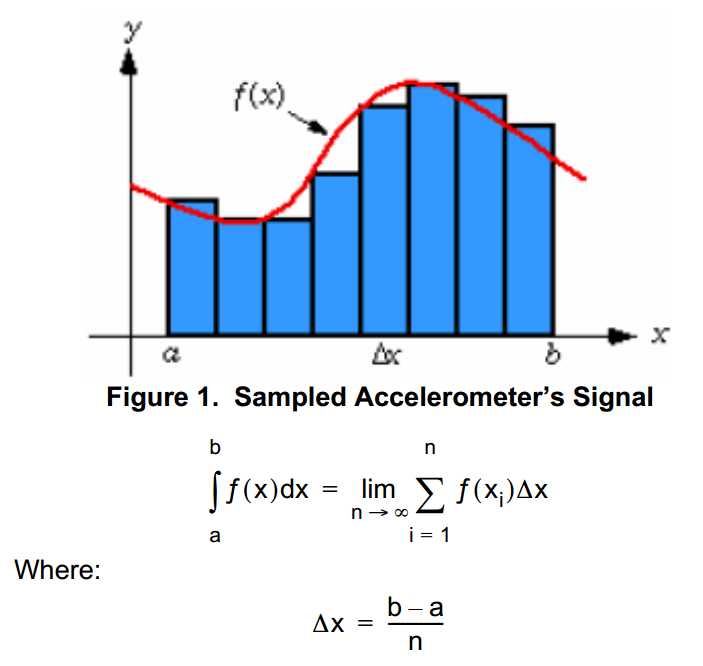
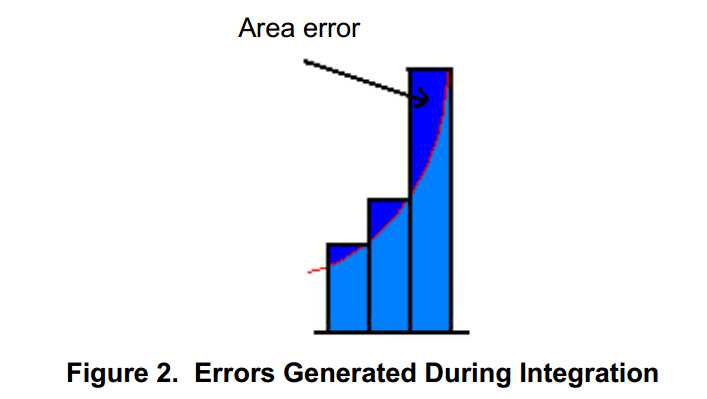
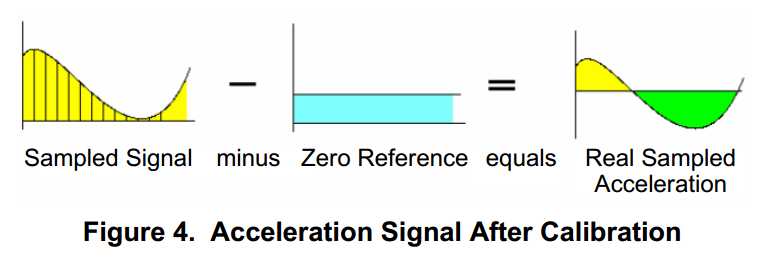
1 #include <hidef.h> 2 #include "derivative.h" 3 #include "adc.h" 4 #include "buzzer.h" 5 #include "SCItx.h" 6 #pragma DATA_SEG MY_ZEROPAGE 7 unsigned char near Sample_X; 8 unsigned char near Sample_Y; 9 unsigned char near Sample_Z; 10 unsigned char near Sensor_Data[8]; 11 unsigned char near countx,county ; 12 signed int near accelerationx[2], accelerationy[2]; 13 signed long near velocityx[2], velocityy[2]; 14 signed long near positionX[2]; 15 signed long near positionY[2]; 16 signed long near positionZ[2]; 17 unsigned char near direction; 18 unsigned long near sstatex,sstatey; 19 #pragma DATA_SEG DEFAULT 20 void init(void); 21 void Calibrate(void); 22 void data_transfer(void); 23 void concatenate_data(void); 24 void movement_end_check(void); 25 void position(void); 26 void main (void) 27 { 28 init(); 29 get_threshold(); 30 do 31 { 32 position(); 33 }while(1); 34 } 35 /******************************************************************************* 36 The purpose of the calibration routine is to obtain the value of the reference threshold. 37 It consists on a 1024 samples average in no-movement condition. 38 ********************************************************************************/ 39 void Calibrate(void) 40 { 41 unsigned int count1; 42 count1 = 0; 43 do{ 44 ADC_GetAllAxis(); 45 sstatex = sstatex + Sample_X; // Accumulate Samples 46 sstatey = sstatey + Sample_Y; 47 count1++; 48 }while(count1!=0x0400); // 1024 times 49 sstatex=sstatex>>10; // division between 1024 50 sstatey=sstatey>>10; 51 } 52 /*****************************************************************************************/ 53 /****************************************************************************************** 54 This function obtains magnitude and direction 55 In this particular protocol direction and magnitude are sent in separate variables. 56 Management can be done in many other different ways. 57 *****************************************************************************************/ 58 void data_transfer(void) 59 { 60 signed long positionXbkp; 61 signed long positionYbkp; 62 unsigned int delay; 63 unsigned char posx_seg[4], posy_seg[4]; 64 if (positionX[1]>=0) { //This line compares the sign of the X direction data 65 direction= (direction | 0x10); //if its positive the most significant byte 66 posx_seg[0]= positionX[1] & 0x000000FF; // is set to 1 else it is set to 8 67 posx_seg[1]= (positionX[1]>>8) & 0x000000FF; // the data is also managed in the 68 // subsequent lines in order to 69 posx_seg[2]= (positionX[1]>>16) & 0x000000FF; // be sent. The 32 bit variable must be 70 posx_seg[3]= (positionX[1]>>24) & 0x000000FF; // split into 4 different 8 bit 71 // variables in order to be sent via 72 // the 8 bit SCI frame 73 } 74 else {direction=(direction | 0x80); 75 positionXbkp=positionX[1]-1; 76 positionXbkp=positionXbkp^0xFFFFFFFF; 77 posx_seg[0]= positionXbkp & 0x000000FF; 78 posx_seg[1]= (positionXbkp>>8) & 0x000000FF; 79 posx_seg[2]= (positionXbkp>>16) & 0x000000FF; 80 posx_seg[3]= (positionXbkp>>24) & 0x000000FF; 81 } 82 if (positionY[1]>=0) { // Same management than in the previous case 83 direction= (direction | 0x08); // but with the Y data. 84 posy_seg[0]= positionY[1] & 0x000000FF; 85 posy_seg[1]= (positionY[1]>>8) & 0x000000FF; 86 posy_seg[2]= (positionY[1]>>16) & 0x000000FF; 87 posy_seg[3]= (positionY[1]>>24) & 0x000000FF; 88 } 89 else {direction= (direction | 0x01); 90 positionYbkp=positionY[1]-1; 91 positionYbkp=positionYbkp^0xFFFFFFFF; 92 posy_seg[0]= positionYbkp & 0x000000FF; 93 posy_seg[1]= (positionYbkp>>8) & 0x000000FF; 94 posy_seg[2]= (positionYbkp>>16) & 0x000000FF; 95 posy_seg[3]= (positionYbkp>>24) & 0x000000FF; 96 } 97 delay = 0x0100; 98 Sensor_Data[0] = 0x03; 99 Sensor_Data[1] = direction; 100 Sensor_Data[2] = posx_seg[3]; 101 Sensor_Data[3] = posy_seg[3]; 102 Sensor_Data[4] = 0x01; 103 Sensor_Data[5] = 0x01; 104 Sensor_Data[6] = END_OF_FRAME; 105 while (--delay); 106 SCITxMsg(Sensor_Data); // Data transferring function 107 while (SCIC2 & 0x08); 108 } 109 /*****************************************************************************************/ 110 /****************************************************************************************** 111 This function returns data format to its original state. When obtaining the magnitude and 112 direction of the position, an inverse two‘s complement is made. This function makes the two‘s 113 complement in order to return the data to it original state. 114 It is important to notice that the sensibility adjustment is greatly impacted here, the amount 115 of "ones" inserted in the mask must be equivalent to the "ones" lost in the shifting made in 116 the previous function upon the sensibility modification. 117 ******************************************************************************************/ 118 void data_reintegration(void) 119 { 120 if (direction >=10) 121 {positionX[1]= positionX[1]|0xFFFFC000;} // 18 "ones" inserted. Same size as the 122 //amount of shifts 123 direction = direction & 0x01; 124 if (direction ==1) 125 {positionY[1]= positionY[1]|0xFFFFC000;} 126 } 127 /****************************************************************************************** 128 This function allows movement end detection. If a certain number of acceleration samples are 129 equal to zero we can assume movement has stopped. Accumulated Error generated in the velocity 130 calculations is eliminated by resetting the velocity variables. This stops position increment 131 and greatly eliminates position error. 132 ******************************************************************************************/ 133 void movement_end_check(void) 134 { 135 if (accelerationx[1]==0) //we count the number of acceleration samples that equals cero 136 { countx++;} 137 else { countx =0;} 138 if (countx>=25) //if this number exceeds 25, we can assume that velocity is cero 139 { 140 velocityx[1]=0; 141 velocityx[0]=0; 142 } 143 if (accelerationy[1]==0) //we do the same for the Y axis 144 { county++;} 145 else { county =0;} 146 if (county>=25) 147 { 148 velocityy[1]=0; 149 velocityy[0]=0; 150 } 151 } 152 /*****************************************************************************************/ 153 /****************************************************************************************** 154 This function transforms acceleration to a proportional position by integrating the 155 acceleration data twice. It also adjusts sensibility by multiplying the "positionX" and 156 "positionY" variables. 157 This integration algorithm carries error, which is compensated in the "movenemt_end_check" 158 subroutine. Faster sampling frequency implies less error but requires more memory. Keep in 159 mind that the same process is applied to the X and Y axis. 160 *****************************************************************************************/ 161 void position(void) 162 { 163 unsigned char count2 ; 164 count2=0; 165 do{ 166 ADC_GetAllAxis(); 167 accelerationx[1]=accelerationx[1] + Sample_X; //filtering routine for noise attenuation 168 accelerationy[1]=accelerationy[1] + Sample_Y; //64 samples are averaged. The resulting 169 //average represents the acceleration of 170 //an instant 171 count2++; 172 }while (count2!=0x40); // 64 sums of the acceleration sample 173 accelerationx[1]= accelerationx[1]>>6; // division by 64 174 accelerationy[1]= accelerationy[1]>>6; 175 accelerationx[1] = accelerationx[1] - (int)sstatex; //eliminating zero reference 176 //offset of the acceleration data 177 accelerationy[1] = accelerationy[1] - (int)sstatey; // to obtain positive and negative 178 //acceleration 179 if ((accelerationx[1] <=3)&&(accelerationx[1] >= -3)) //Discrimination window applied 180 {accelerationx[1] = 0;} // to the X axis acceleration 181 //variable 182 if ((accelerationy[1] <=3)&&(accelerationy[1] >= -3)) 183 {accelerationy[1] = 0;} 184 //first X integration: 185 velocityx[1]= velocityx[0]+ accelerationx[0]+ ((accelerationx[1] -accelerationx[0])>>1); 186 //second X integration: 187 positionX[1]= positionX[0] + velocityx[0] + ((velocityx[1] - velocityx[0])>>1); 188 //first Y integration: 189 velocityy[1] = velocityy[0] + accelerationy[0] + ((accelerationy[1] -accelerationy[0])>>1); 190 //second Y integration: 191 positionY[1] = positionY[0] + velocityy[0] + ((velocityy[1] - velocityy[0])>>1); 192 accelerationx[0] = accelerationx[1]; //The current acceleration value must be sent 193 //to the previous acceleration 194 accelerationy[0] = accelerationy[1]; //variable in order to introduce the new 195 //acceleration value. 196 velocityx[0] = velocityx[1]; //Same done for the velocity variable 197 velocityy[0] = velocityy[1]; 198 positionX[1] = positionX[1]<<18; //The idea behind this shifting (multiplication) 199 //is a sensibility adjustment. 200 positionY[1] = positionY[1]<<18; //Some applications require adjustments to a 201 //particular situation 202 //i.e. mouse application 203 data_transfer(); 204 positionX[1] = positionX[1]>>18; //once the variables are sent them must return to 205 positionY[1] = positionY[1]>>18; //their original state 206 movement_end_check(); 207 positionX[0] = positionX[1]; //actual position data must be sent to the 208 positionY[0] = positionY[1]; //previous position 209 direction = 0; // data variable to direction variable reset 210 } 211 /*****************************************************************************************/
原文链接:http://cache.freescale.com/files/sensors/doc/app_note/AN3397.pdf?fsrch=1&sr=2
本文链接:http://www.cnblogs.com/cposture/p/4378922.html
标签:
原文地址:http://www.cnblogs.com/cposture/p/4378922.html
