标签:
1、什么是进程调度
无论是在批处理系统还是分时系统中,用户进程数一般都多于处理机数、这将导致它们互相争夺处理机。另外,系统进程也同样需要使用处理机。这就要求进程调度程序按一定的策略,动态地把处理机分配给处于就绪队列中的某一个进程,以使之执行。
2、处理机调度分类
#include "stdio.h" #include <stdlib.h> #include "string.h" #define NULL 0 typedef struct pcb { char name[10]; //进程名称 int ArrivalTime; //到达时间 int StartTime; //开始运行时间 int FinishTime; //结束运行时间 int WholeTime; //运行所需时间 struct pcb *link; //下一个指针 }pcb; int N; //运行的进程数量 void input(); pcb *ready=NULL,*p=NULL,*finish = NULL; //ready 是初始时的状态,finish 是结束时状态 int M;
void input() { printf("请输入进程数量:"); scanf("%d",&N); //N为全局变量 M = N; struct pcb *q = ready; int i = 0; for( i=0 ;i<N;i++) { printf("请输入第 %d 个进程信息-----------\n",i+1); p = (pcb *)malloc(sizeof(pcb)); printf("请输入进程名:") ; scanf("%s",p->name); printf("请输入进程到达时间:"); scanf("%d",&p->ArrivalTime); printf("请输入进程运行时间:"); scanf("%d",&p->WholeTime); p->link = NULL; if(NULL == ready) { ready = p; q = ready; } else { q = ready; while(NULL != q->link) //将q移动到就绪队列最后一个进程 { q = q->link; } p->link = NULL; q->link = p; q=p; } printf("\n"); } q= NULL; free(q); }
//先输入的肯定是先到达的 //nowTime 是现在执行的时间 pcb* sjf(int nowTime,int *after) { int i = 0 ; pcb *nowProgress=NULL, *p = ready; int ProgressNum = 0; // 当前最短的是第几个线程 int minTime =0; // 最短运行时间 if(NULL != ready) { while(NULL != p) //遍历整个链表,查找出最短的进程,即运行时间最短 { // printf("\n%d %d %d \n",p->ArrivalTime,nowTime >= p->ArrivalTime,nowTime) ; if(nowTime >= p->ArrivalTime) { if(0 == minTime) //首次赋值 { nowProgress = p; minTime = p->WholeTime; } else { if(p->WholeTime < minTime) { nowProgress = p; minTime = p->WholeTime; } } *after = minTime+nowTime; } p = p->link; } } return nowProgress; }
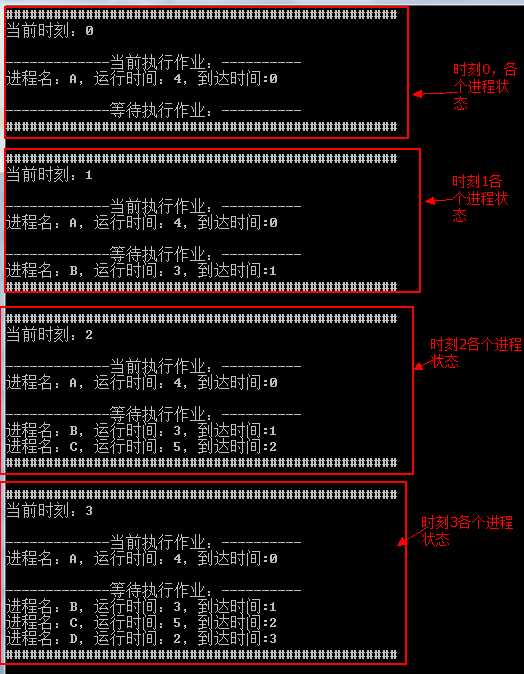
void output(pcb *p,int now_time) { if(NULL == p) { printf("当前时刻:%d,暂无进程在运行!\n",now_time); } else { printf("进程名:%s,运行时间:%d,到达时间:%d\n",p->name,p->WholeTime,p->ArrivalTime); } }
5》、输出进程运行总体情况统计
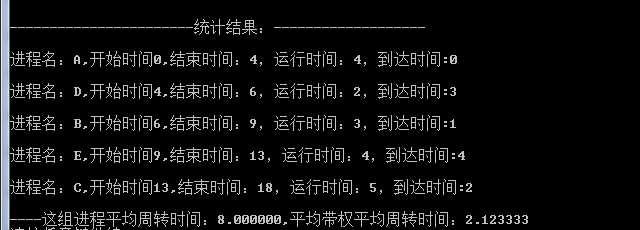
void outputAll() { pcb *p = finish; printf("\n-----------------------统计结果:-------------------\n"); float avgRevolve = 0; float avgSuperRevolve = 0; while(NULL != p) { avgRevolve += p->StartTime+p->WholeTime-p->ArrivalTime; avgSuperRevolve += 1.0*(p->StartTime+p->WholeTime-p->ArrivalTime)/p->WholeTime; printf("\n进程名:%s,开始时间%d,结束时间:%d,运行时间:%d,到达时间:%d\n",p->name,p->StartTime,p->FinishTime,p->WholeTime,p->ArrivalTime); p = p->link; } printf("\n----这组进程平均周转时间:%f,平均带权平均周转时间:%f\n",avgRevolve/M,avgSuperRevolve/M); }
6》、删除准备队列(ready)已经运行的进程p ,添加到完成队列(finish)队列中
// 删除准备队列(ready)已经运行的进程p ,添加到完成队列(finish)队列中 void destory(pcb *p,int now_time) { pcb *q = ready; pcb *f = NULL; if(strcmp(p->name,ready->name) == 0) //第一个进程 { ready = ready ->link; } else //中间进程 { q = ready; while( (strcmp(q->link->name,p->name) != 0) && NULL != q->link) //找到p要删除的位置 { q= q->link; } q->link = p->link; } //将已经运行的进程添加到finish队列 p->StartTime = now_time-p->WholeTime; p->FinishTime = now_time; if(NULL == finish) //第一个完成的进程 { finish = p; p->link = NULL; } else //中间完成的进程 { f = finish; while(NULL != f->link ) { f = f->link; } f->link = p; p->link = NULL; } N--; //等待进程减1 }
int main() { input(); struct pcb *s = ready; int now_time = 0 ; struct pcb *nowProgress = NULL; //当前运行的进程 int *after = 0; //执行完一个进程之后的时间 int i = 0 ; pcb *m = ready; while(N > 0)//一次运行一个进程 { nowProgress = sjf(now_time,&after); if(NULL != nowProgress) //当前有进程在运行 { for(;now_time < after;now_time++) //输出每个时刻运行的进程情况 { printf("#################################################\n"); printf("当前时刻:%d\n",now_time); printf("\n-------------当前执行进程:----------\n"); output(nowProgress,now_time); printf("\n-------------等待执行进程:----------\n"); m=ready; while(NULL != m) { if(m != nowProgress) { if(m->ArrivalTime <= now_time) output(m,now_time); } m= m->link; } printf("#################################################\n\n"); } printf("\n"); destory(nowProgress,now_time); } else //没有进程在运行 { output(nowProgress,now_time); now_time ++; } } outputAll(); return 0; }

1.先来先服务(FCFS, First Come First Serve),按先后顺序进行调度。
(1)、适用场景:
比较有利于长进程,而不利于短进程。因为长进程会长时间占据处理机。
有利于CPU繁忙的进程,而不利于I/O繁忙的进程。
(2)、优点:
有利于长进程,有利于等待时间久的进程,不会有进程长期等待而得不到响应。有利于CPU频繁的进程。
(3)、缺点:
不利于短进程,忽视了进程的运行时间。不利于I/O频繁的进程。
2. 响应比高者优先(HRN):FCFS和SJF的的折中,动态生成昨夜的优先级。
(1)、优点:
既考虑了进程的等待时间,又考虑了进程的运行时间,是FCFS和SJF的的折中,会考虑让进程短的先进行,随着长进程等待时间的增加,优先级相应的增加,使得通过一定时间的等待,必然有机会获得处理机。
(2)、缺点:
在每次进行调度之前,都需要先做响应比的计算,会增加系统的开销
3. 优先级法(Priority Scheduling):按照进程的优先级,对进程进程调度。
(1)、分类:
静态优先级:
进程调度中的静态优先级大多按以下原则确定:
由用户自己根据进程的紧急程度输入一个适当的优先级。
由系统或操作员根据进程类型指定优先级。
系统根据进程要求资源情况确定优先级。
进程的静态优先级的确定原则:
按进程的类型给予不同的优先级。
将进程的情态优先级作为它所属进程的优先级。
动态优先级:
进程的动态优先级一般根据以下原则确定:
根据进程占用有CPU时间的长短来决定。
根据就绪进程等待CPU的时间长短来决定。
(2)、优点:
可以通过优先级反映进程的紧迫程序,使比较紧迫的进程优先运行
(3)、缺点:
需要计算进程的优先级,会产生一定的开销。
4.短进程优先法(SJF, Shortest Job First):短进程优先运行,其目标是减少平均周转时间。
(1) 优点:
比FCFS改善平均周转时间和平均带权周转时间,缩短进程的等待时间;
提高系统的吞吐量;
(2) 缺点:
对长进程非常不利,可能长时间得不到执行;
未能依据进程的紧迫程度来划分执行的优先级;
难以准确估计进程(进程)的执行时间,从而影响调度性能。
采用SJF算法时,人—机交互无法实现
完全未考虑进程的紧迫程度,故不能保证紧迫性进程得到及时处理
标签:
原文地址:http://www.cnblogs.com/0201zcr/p/4638875.html