标签:
手头上有个项目需要通过单片机来控制将图像显示在LCD上,在网上搜了一阵子,发现都是使用的FPGA做的,
开始自己对FPGA不是很熟,一直在用的也是ARM系列的,终于让我找到一份至少现在看起来还是含金量蛮高的资料,
因为是英文的,这边先将它翻译一下(原文链接)。
想到之前玩的一些老的视频游戏和街机游戏(很早之前,大概70/80年代左右),脑子里浮现出一个想法:
如果在今天,我们是不是可以使用成本比较低的微控制器来实现之前玩玩的那些游戏呢?
这些微控制器设计的初衷并不是用来干这些事情的,所以问题也就产生了:
如何在使用很少或者不使用外部组件的情况下向显示器输出视频信号呢?
我们选择了36-pin, 72 MHz的STM32 (STM32F103T8U6),
足够用于产生黑白视频信号和点信号,同时还使用了一些定时器和SPI(在这种方式下更新帧缓冲是自动完成的),
在400*200分辨率的显示器上VGA输出视频信号看起来还是比较可观的。
1 STM32F103T8U6开发板一块(或者同类型的开发板)。我们使用的是AK-STM32-LKIT。
2 VGA母口一个(DB15)

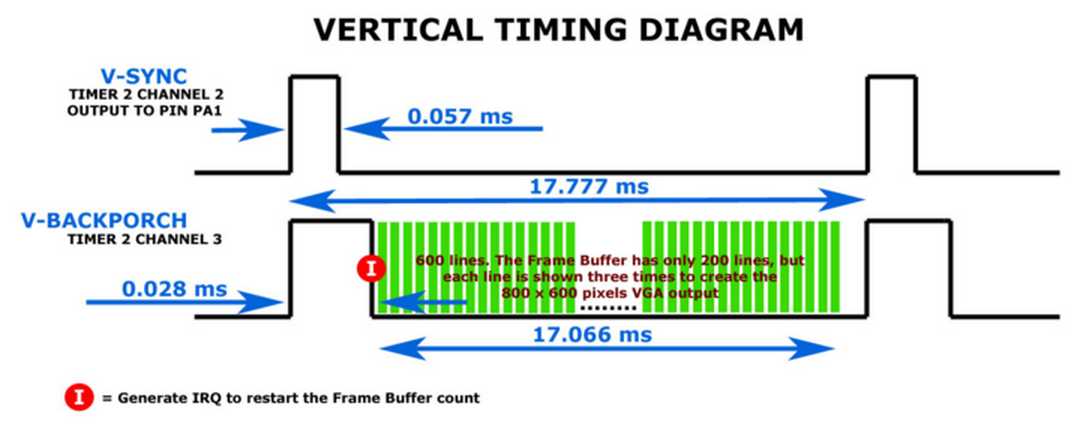
虽然帧缓冲区是400*200的,但是输出的分辨率却是800*600(56hz刷新频率),
我们采用把横着点绘制两次,竖着的点绘制三次的方法来达到扩展分辨率的目的。
我们选择800×600 @ 56Hz的原因是因为像素时钟;
输出分辨率使用36MHz像素时钟,周期是72MHz的倍数(STM32的频率),
因为我们需要使用SPI产生像素信号,可以把STM32的频率经过SPI预分频得到18MHz的像素时钟,
然后将每一个像素点绘制两次,具体方法是当在水平方向800像素点时输出一个信号像素,
SPI 的 MOSI信号保持低电平或者高电平两倍的时间(相比于之前绘制一个点的时间)。
帧缓冲区是一个52×200字节的数组。每一行有50*8=400个像素(每一个bit是一个像素),
剩下的两个字节(52-50)模拟每一行的消隐间隔。
#define VID_VSIZE 200 #define VID_HSIZE 50 __align(4) u8 fb[VID_VSIZE][VID_HSIZE+2];
在这一块ram中写入的数据都会被输出到屏幕,DMA被设置为自动从数据缓冲区读取数据并且输出到SPI的MOSI引脚。
水平同步信号( horizontal synchronism signal)和后延时间(back porch time)由TIM1定时器产生的通道1和2产生,TIM1定时器产生的通道1连接到PA8。
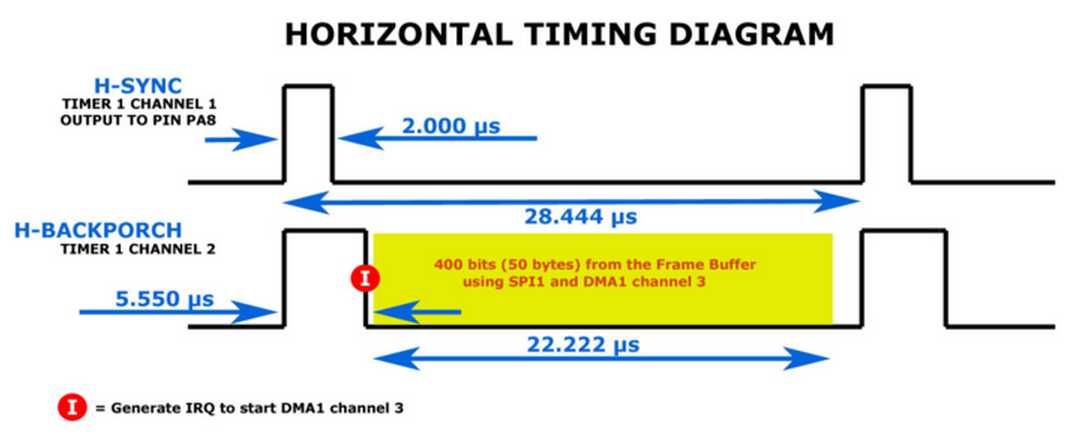
H-SYNC也就是TIM1定时器的通道1将会产生水平同步信号给显示器。
H-BACKPORCH也就是TIM1定时器的通道2,计算水平同步时间的和以及后延时间,
这个定时器产生一个中断用于触发DMA开始通过SPI发送像素的请求。
帧缓冲里面的每一行都会重复这样的过程,
TIM2定时器用于产生垂直同步信号,但是实在从机模式下。
TIM2计算主机(TIM1)产生的H-SYNC脉冲数。
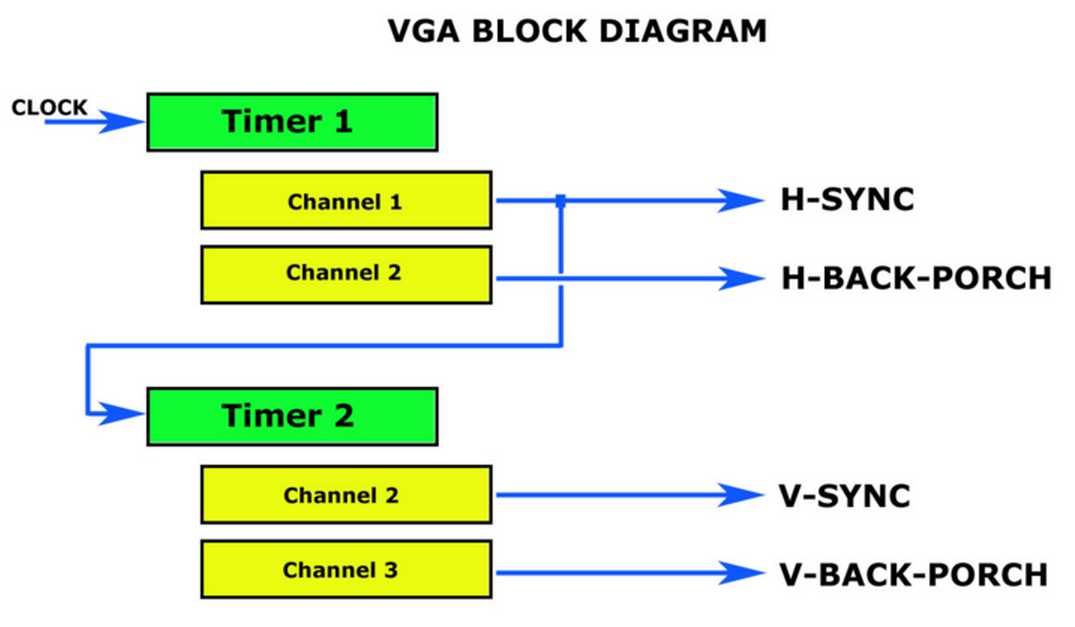
TIM2的通道2通过PA1输出V-SYNC信号。
TIM2的通道3将会触发一个中断当定时器的计数器达到V-SYNC的和垂直后沿时间。
这个中断会设置一个变量表明正在扫描一个有效帧并且DMA可以开始发送像素到屏幕了。
像素由SPI的MOSI(PA7)产生。
定时器TIM1的通道2产生一个中断用于使能DMA TX请求向SPI发送数据。
DMA将会从帧缓冲区读取一行并且将数据放到SPI的DR寄存器。
DMA被设置用来在一行信号被发送之后产生一个中断,行号是递增的。
因为我们将每一行发送了三次,我们在中断中将计数加1。
当三行数据被发送出去,我们将DMA指针指向下一行的帧缓冲。
当所有的行被发送出去,DMA被禁止直到下一个有效单的帧中断发生(TIM2通道3)。
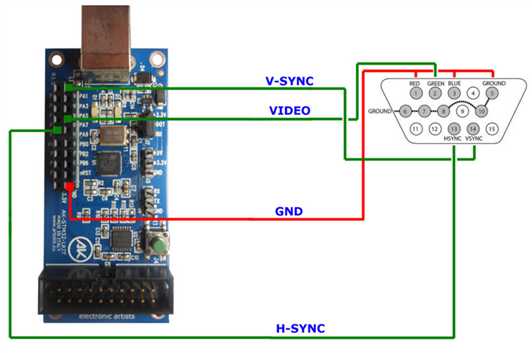
你只需要几根杜邦线和一个母口的VGA接口就可以完成这项工作了。
VGA标准说输出信号应该在0.7V到1V之间,所以你需要在线上进行分压(串联68欧姆和33欧姆的电阻要比47pF和68欧姆的并联),
我们已经测试了一系列的LCD寄存器在没有分压的情况下,工作起来还行。
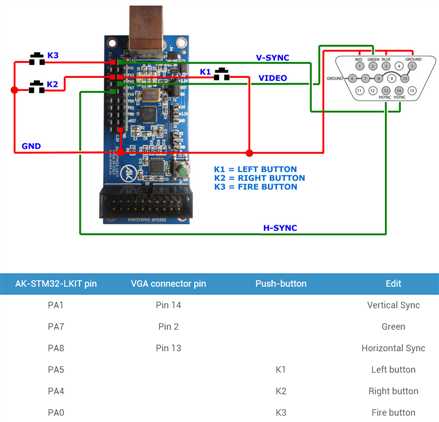
引脚发参考AK-STM32-LKIT扩展板接插件,引脚命名对于所有的STM32都有效。
根据你自己所用的STM32的手册确定使用的引脚是否一致。
我们使用绿色(VGA的引脚2)来模拟旧的那种显示效果,你可以使用其他的色彩方案使用
RED/GREEN/BLUE DB15引脚,可以创建8种颜色组合。

我们使用了一个低成本微处理器作为VGA控制器,实现这个目的的方法很多,但是这种方法不需要额外的组件除了一个VGA接口。
如果你使用的是更高级的STM32,你可以试着使用扩大缓冲区而且在DMA被禁止的时候写帧缓冲区以避免数据被割裂。
你可以下载 源码,在里面你可以找到画线描点等等的工具库。
下一篇日志中会通过VGA样例来实现视频游戏。
Using the previous VGA output project, we have created this Space Invaders version for STM32.
The source code is kept as a separated project, but uses the same engine of the VGA output project.
Click here to download the source code.
We have added three push-buttons to the original connections.
These push-buttons serve as a joystick.
Here are the connections for the push-buttons and the VGA connector:
THANK YOU for sharing you project with us.
Your project was a starting point to our project.
I used your logic, rewritten whole code, expanded to 2 output SPI,
sinhronized them in slave mode using two more timers.
One to be same as TIM1, to trigger 10Mhz timer for SPI CLK.
I did additional logic with input part and viola an adapter on a MCU.
https://www.youtube.com/watch?v=HGje7a6_1Jk
Best regards from Slovenia
1 #ifndef __VIDEO_H 2 #define __VIDEO_H 3 4 #include "gdptypes.h" 5 6 #define VID_HSIZE 50 // Horizontal resolution (in bytes) 7 #define VID_VSIZE 200 // Vertical resolution (in lines) 8 9 #define VID_PIXELS_X (VID_HSIZE * 8) 10 #define VID_PIXELS_Y VID_VSIZE 11 #define VID_PIXELS_XR (VID_PIXELS_X + 16) 12 #define VID_HSIZE_R (VID_HSIZE + 2) 13 14 // Function definitions 15 16 void vidInit(void); 17 void vidClearScreen(void); 18 19 #endif // __VIDEO_H
1 /*************************************************************************** 2 * STM32 VGA demo 3 * Copyright (C) 2012 Artekit Italy 4 * http://www.artekit.eu 5 * Written by Ruben H. Meleca 6 7 ### video.c 8 9 # This program is free software; you can redistribute it and/or modify 10 # it under the terms of the GNU General Public License as published by 11 # the Free Software Foundation; either version 2 of the License, or 12 # (at your option) any later version. 13 # 14 # This program is distributed in the hope that it will be useful, 15 # but WITHOUT ANY WARRANTY; without even the implied warranty of 16 # MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the 17 # GNU General Public License for more details. 18 # 19 # You should have received a copy of the GNU General Public License 20 # along with this program; if not, write to the Free Software 21 # Foundation, Inc., 675 Mass Ave, Cambridge, MA 02139, USA. 22 23 ***************************************************************************/ 24 25 #include "stm32f10x.h" 26 #include "video.h" 27 28 #define VTOTAL 52 /* Total bytes to send through SPI */ 29 __align(4) u8 fb[VID_VSIZE][VID_HSIZE+2]; /* Frame buffer */ 30 static volatile u16 vline = 0; /* The current line being drawn */ 31 static volatile u32 vflag = 0; /* When 1, the SPI DMA request can draw on the screen */ 32 static volatile u32 vdraw = 0; /* Used to increment vline every 3 drawn lines */ 33 34 void TIMER_Configuration(void) 35 { 36 GPIO_InitTypeDef GPIO_InitStructure; 37 NVIC_InitTypeDef nvic; 38 TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; 39 TIM_OCInitTypeDef TIM_OCInitStructure; 40 u32 TimerPeriod = 0; 41 u16 Channel1Pulse = 0, Channel2Pulse = 0, Channel3Pulse = 0; 42 43 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_8; 44 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 45 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; 46 GPIO_Init(GPIOA, &GPIO_InitStructure); 47 48 /* 49 SVGA 800x600 @ 56 Hz 50 Vertical refresh 35.15625 kHz 51 Pixel freq. 36.0 MHz 52 53 1 system tick @ 72Mhz = 0,0138 us 54 */ 55 56 /* 57 Horizontal timing 58 ----------------- 59 60 Timer 1 period = 35156 Hz 61 62 Timer 1 channel 1 generates a 2 us pulse for HSYNC each 28.4 us. : D = ( 2 / 28.4 ) 63 28.4 us = Visible area + Front porch + Sync pulse + Back porch. 64 HSYNC is 2 us long, so the math to do is: 65 2us / 0,0138us = 144 system ticks. 66 67 Timer 1 channel 2 generates a pulse equal to HSYNC + back porch = 2 + 3.55 = 5.55 68 This interrupt will fire the DMA request to draw on the screen if vflag == 1. 69 Since firing the DMA takes more or less 800ns, we‘ll add some extra time. 70 The math for HSYNC + back porch is: 71 (2us + 3,55us - dma) / 0,0138us = +-350 system ticks 72 73 Horizontal timing info 800 + 24+72+128 = 1024 74 -------------------------------------------- 75 76 Dots us 77 -------------------------------------------- 78 Visible area 800 22.222222222222 79 Front porch 24 0.66666666666667 80 Sync pulse 72 2 81 Back porch 128 3.5555555555556 82 Whole line 1024 28.444444444444 83 84 */ 85 86 TimerPeriod = 2048; 87 Channel1Pulse = 144; /* HSYNC */ 88 Channel2Pulse = 352; /* HSYNC + BACK PORCH */ 89 90 TIM_TimeBaseStructure.TIM_Prescaler = 0; 91 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; 92 TIM_TimeBaseStructure.TIM_Period = TimerPeriod; // 2048 93 TIM_TimeBaseStructure.TIM_ClockDivision = 0; 94 TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; 95 TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); 96 97 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
98 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; 99 TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; 100 TIM_OCInitStructure.TIM_Pulse = Channel1Pulse; // 144 101 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; 102 TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; 103 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; 104 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Set; 105 106 TIM_OC1Init(TIM1, &TIM_OCInitStructure); // PA8 107 108 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Inactive; // No Output
109 TIM_OCInitStructure.TIM_Pulse = Channel2Pulse; // 352 110 TIM_OC2Init(TIM1, &TIM_OCInitStructure); 111 112 /* TIM1 counter enable and output enable */ 113 TIM_CtrlPWMOutputs(TIM1, ENABLE); 114 115 /* Select TIM1 as Master */ 116 TIM_SelectMasterSlaveMode(TIM1, TIM_MasterSlaveMode_Enable); 117 TIM_SelectOutputTrigger(TIM1, TIM_TRGOSource_Update); 118 119 /* 120 Vertical timing 121 --------------- 122 123 Polarity of vertical sync pulse is positive. 124 125 Lines = 600 + 1+2+22 = 625 126 ------------------------------ 127 Visible area 600 128 Front porch 1 129 Sync pulse 2 130 Back porch 22 131 Whole frame 625 132 133 */ 134 135 /* VSYNC (TIM2_CH2) and VSYNC_BACKPORCH (TIM2_CH3) */ 136 /* Channel 2 and 3 Configuration in PWM mode */ 137 TIM_SelectSlaveMode(TIM2, TIM_SlaveMode_Gated); 138 TIM_SelectInputTrigger(TIM2, TIM_TS_ITR0); // TIM1 139 140 TimerPeriod = 625; /* Vertical lines */ 141 Channel2Pulse = 2; /* Sync pulse */ 142 Channel3Pulse = 24; /* Sync pulse + Back porch = 2 lines + 24 lines */ 143 TIM_TimeBaseStructure.TIM_Prescaler = 0; 144 TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; 145 TIM_TimeBaseStructure.TIM_Period = TimerPeriod; 146 TIM_TimeBaseStructure.TIM_ClockDivision = 0; 147 TIM_TimeBaseStructure.TIM_RepetitionCounter = 0; 148 149 TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure); 150 151 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; 152 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; 153 TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; 154 TIM_OCInitStructure.TIM_Pulse = Channel2Pulse; 155 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; 156 TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; 157 TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset; 158 TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Set; 159 TIM_OC2Init(TIM2, &TIM_OCInitStructure); 160 161 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Inactive; 162 TIM_OCInitStructure.TIM_Pulse = Channel3Pulse; 163 TIM_OC3Init(TIM2, &TIM_OCInitStructure); 164 165 /* TIM2 counter enable and output enable */ 166 TIM_CtrlPWMOutputs(TIM2, ENABLE); 167 168 /* Interrupt TIM2 -- Generate IRQ to restart the Frame Buffer Count */ 169 nvic.NVIC_IRQChannel = TIM2_IRQn; 170 nvic.NVIC_IRQChannelPreemptionPriority = 1; 171 nvic.NVIC_IRQChannelSubPriority = 0; 172 nvic.NVIC_IRQChannelCmd = ENABLE; 173 174 NVIC_Init(&nvic); 175 TIM_ITConfig(TIM2, TIM_IT_CC3, ENABLE); 176 177 /* Interrupt TIM1 -- Generate IRQ to start DMA1 Channel 3 */ 178 nvic.NVIC_IRQChannel = TIM1_CC_IRQn; 179 nvic.NVIC_IRQChannelPreemptionPriority = 1; 180 nvic.NVIC_IRQChannelSubPriority = 0; 181 nvic.NVIC_IRQChannelCmd = ENABLE; 182 183 NVIC_Init(&nvic); 184 TIM_ITConfig(TIM1, TIM_IT_CC2, ENABLE); 185 186 TIM_Cmd(TIM2, ENABLE); 187 TIM_Cmd(TIM1, ENABLE); 188 } 189 190 void SPI_Configuration(void) 191 { 192 NVIC_InitTypeDef nvic; 193 SPI_InitTypeDef SPI_InitStructure; 194 DMA_InitTypeDef DMA_InitStructure; 195 GPIO_InitTypeDef GPIO_InitStructure; 196 197 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; 198 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; 199 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; 200 GPIO_Init(GPIOA, &GPIO_InitStructure); 201 202 SPI_Cmd(SPI1, DISABLE); 203 DMA_DeInit(DMA1_Channel3); 204 205 DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&SPI1->DR; 206 DMA_InitStructure.DMA_MemoryBaseAddr = (u32) &fb[0][0]; 207 DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST; 208 DMA_InitStructure.DMA_BufferSize = VTOTAL; 209 DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; 210 DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; 211 DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; 212 DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; 213 DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; 214 DMA_InitStructure.DMA_Priority = DMA_Priority_Low; 215 DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; 216 DMA_Init(DMA1_Channel3, &DMA_InitStructure); 217 218 SPI_InitStructure.SPI_Direction = SPI_Direction_1Line_Tx; 219 SPI_InitStructure.SPI_Mode = SPI_Mode_Master; 220 SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; 221 SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // Mode : (0,1) 222 SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; 223 SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; 224 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; // 72/4=18MHz 225 SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; 226 SPI_InitStructure.SPI_CRCPolynomial = 7; 227 SPI_Init(SPI1, &SPI_InitStructure); 228 229 SPI_CalculateCRC(SPI1, DISABLE); 230 SPI_Cmd(SPI1, ENABLE); 231 232 SPI1->CR2 |= SPI_I2S_DMAReq_Tx; 233 234 nvic.NVIC_IRQChannel = DMA1_Channel3_IRQn; 235 nvic.NVIC_IRQChannelPreemptionPriority = 0; 236 nvic.NVIC_IRQChannelSubPriority = 0; 237 nvic.NVIC_IRQChannelCmd = ENABLE; 238 NVIC_Init(&nvic); 239 240 DMA1_Channel3->CCR &= ~1; 241 DMA1_Channel3->CNDTR = VTOTAL; 242 DMA1_Channel3->CMAR = (u32) &fb[0][0]; 243 244 DMA_ITConfig(DMA1_Channel3, DMA_IT_TC, ENABLE); 245 } 246 247 //***************************************************************************** 248 // This irq is generated at the end of the horizontal back porch. 249 // Test if inside a valid vertical start frame (vflag variable), 250 // and start the DMA to output a single frame buffer line through the SPI device. 251 //***************************************************************************** 252 __irq void TIM1_CC_IRQHandler(void) 253 { 254 if (vflag) 255 { 256 DMA1_Channel3->CCR = 0x93; 257 } 258 TIM1->SR = 0xFFFB; //~TIM_IT_CC2; 259 } 260 261 //***************************************************************************** 262 // This irq is generated at the end of the vertical back porch. 263 // Sets the ‘vflag‘ variable to 1 (valid vertical frame). 264 //***************************************************************************** 265 __irq void TIM2_IRQHandler(void) 266 { 267 vflag = 1; 268 TIM2->SR = 0xFFF7; //~TIM_IT_CC3; 269 } 270 271 //***************************************************************************** 272 // This interrupt is generated at the end of every line. 273 // It will increment the line number and set the corresponding line pointer 274 // in the DMA register. 275 //***************************************************************************** 276 __irq void DMA1_Channel3_IRQHandler(void) 277 { 278 DMA1->IFCR = DMA1_IT_TC3; 279 DMA1_Channel3->CCR = 0x92; 280 DMA1_Channel3->CNDTR = VTOTAL; 281 282 vdraw++; 283 284 if (vdraw == 3) 285 { 286 vdraw = 0; 287 288 vline++; 289 290 if (vline == VID_VSIZE) 291 { 292 vdraw = vline = vflag = 0; 293 DMA1_Channel3->CMAR = (u32) &fb[0][0]; 294 } else { 295 DMA1_Channel3->CMAR += VTOTAL; 296 } 297 } 298 } 299 300 void vidClearScreen(void) 301 { 302 u16 x, y; 303 304 for (y = 0; y < VID_VSIZE; y++) 305 { 306 for (x = 0; x < VTOTAL; x++) 307 { 308 fb[y][x] = 0; 309 } 310 } 311 } 312 313 void vidInit(void) 314 { 315 SPI_Configuration(); 316 TIMER_Configuration(); 317 vidClearScreen(); 318 }
使用36-pin的STM32输出VGA, VGA output using a 36-pin STM32
标签:
原文地址:http://www.cnblogs.com/shangdawei/p/4761213.html