标签:
摄像机标定
确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数。
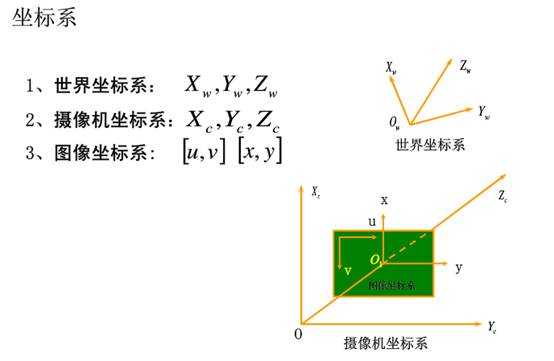
世界坐标系、摄像机坐标系和像平面坐标系都不重合。同时考虑两个因素 :
(1)摄像机镜头的畸变误差,像平面上的成像位置与线性变换公式计算的透视变换投影结果有偏差;
(2)计算机中图像坐标单位是存储器中离散像素的个数,所以像平面上的连续坐标还需取整转换。
摄像机参数
l 摄像机内部参数 (Intrinsic Parameters)
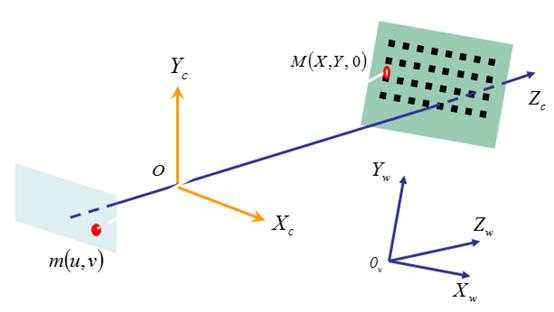
摄像机坐标和理想坐标系之间的关系
图像坐标系、摄像机坐标系
The list of internal parameters:
l 摄像机外部参数 (Extrinsic Parameters)
摄像机在世界坐标系里的位置和方向
摄像机坐标系、世界坐标系
主要包括:旋转矩阵 R 的9个参数和平移矩阵的3个参数。或定义为 6 个。主要包括:
旋转矩阵的3个偏转角和平移矩阵的3个参数。
简而言之:![]()
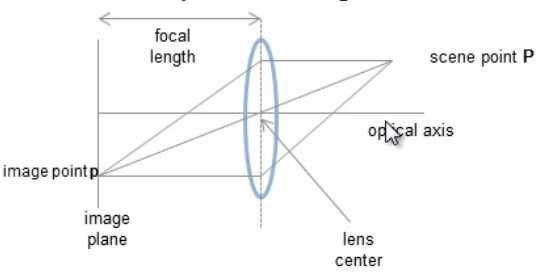
摄像机坐标系的原点![]() 位于摄像机的镜头中心,像平面坐标中心
位于摄像机的镜头中心,像平面坐标中心![]() 位于光轴上,由小孔成像模型,
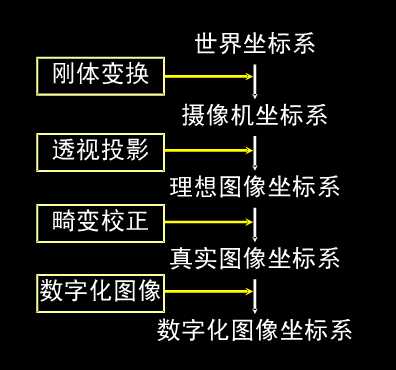
位于光轴上,由小孔成像模型,![]() 为焦距。从客观场景到数字图像的成像变换由
以下4步组成 :
为焦距。从客观场景到数字图像的成像变换由
以下4步组成 :

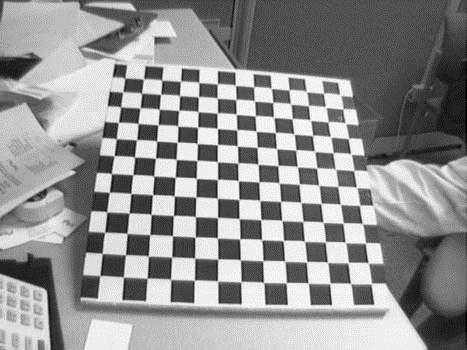
l 传统摄像机标定方法
l 主动视觉摄像机标定方法
l 摄像机自标定方法
|
标定方法 |
特点 |
优点 |
不足 |
|
传统摄像机标定方法 |
利用已知的景物结构信息。常用到标定块。 |
可以使用于任意的摄像机模型,标定精度高 |
标定过程复杂,需要高精度的已知结构信息。 |
|
主动视觉摄像机标定方法 |
已知摄像机的某些运动信息 |
通常可以线性求解,鲁棒性比较高 |
不能使用于摄像机运动未知和无法控制的场合 |
|
摄像机自标定方法 |
仅依靠多幅图像之间的对应关系进行标定 |
仅需要建立图像之间的对应,灵活性强 |
非线性标定,鲁棒性不高 |
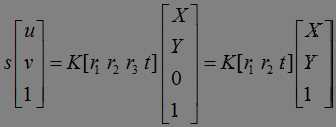
? 在这里假定模板平面在世界坐标系 ![]() 的平面上
的平面上
? 其中,![]() 为摄像机的内参数矩阵,
为摄像机的内参数矩阵,![]() 为模板平面上点的齐次坐标,
为模板平面上点的齐次坐标,![]() 为模板平面上点投影到图象平面上对应点的齐次坐标,
为模板平面上点投影到图象平面上对应点的齐次坐标,![]() 和
和![]() 分别是摄像机坐标系相对于世界坐标系的旋转矩阵和平移向量
分别是摄像机坐标系相对于世界坐标系的旋转矩阵和平移向量
![]()
![]()
根据旋转矩阵的性质,即 ![]() 和
和![]() ,每幅图象可以获得以下两个对内参数矩阵的基本约束
,每幅图象可以获得以下两个对内参数矩阵的基本约束
![]()
![]()
由于摄像机有5个未知内参数,所以当所摄取得的图象数目大于等于3时,就可以线性唯一求解出![]()
标签:
原文地址:http://www.cnblogs.com/star91/p/4764463.html