标签:
下面介绍投影变换矩阵。这个相比较上一遍的就比较难了。主要分为透视投影矩阵和正交投影矩阵,本文主要介绍透视投影矩阵,正交比较简单,就给出矩阵形式。
(1)透视投影变换矩阵
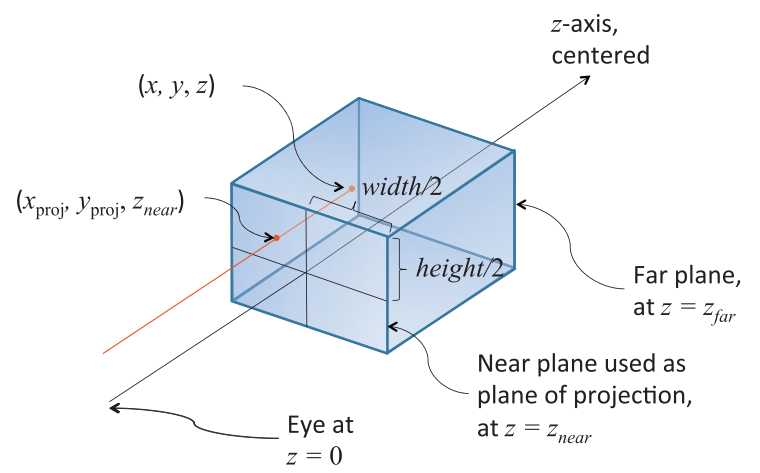
我们先来说一下透视投影需要哪些参数。如图1所示,深色部分表示最终显示的区域。照相机的z轴是穿过视锥体正中心的,显示区域离相机最近的平面我们称为Znear,最远的平面我们称为Zfar。其中Znear就是最终的投影窗口。所以我们要把Znear的宽映射到坐标[-1,1],把Znear的高映射到坐标[-1,1],把Znear到Zfar的深度距离映射到坐标[-1,1]。因为最后的OpenGL绘制的区域其实就是一个从(-1,-1,-1)到(1,1,1)的一个立方体。而且这样映射还有个好处,就是绘制的时候靠近Znear的对象要比靠近Zfar的对象大。
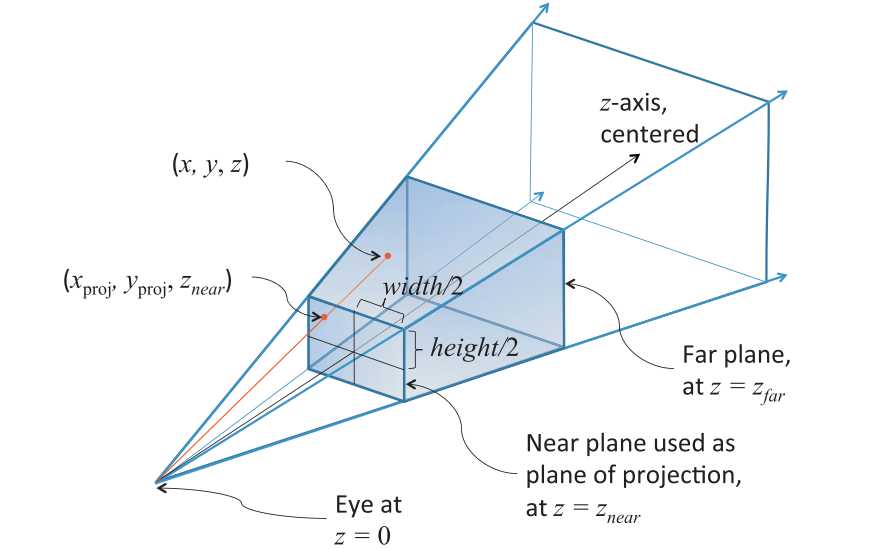
图1
根据这些参数我们可以得到投影变换矩阵。首先,对于这个矩阵,我们先来看x轴和y轴。我们结合上图,根据相似三角形可以得到:
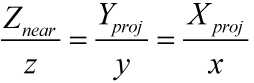
图2
我们化简一下可以得到Yproj=Znear*x/z和Xproj=Znear*y/z。之后我们将齐次坐标的w分量设为z,就可以得到Yproj=Znear*x和Xproj=Znear*y。再将坐标映射到[-1,1],除以投影窗口的长宽即可。我们得到部分透视投影矩阵:
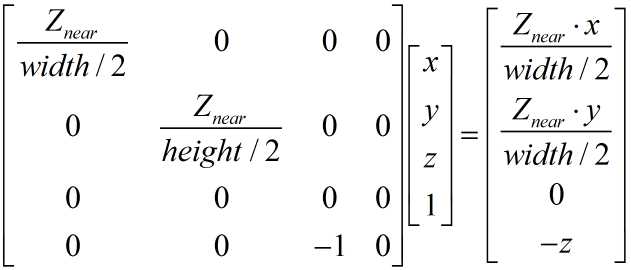
图3
我们再来看z轴。其实z轴映射也非常简单。我们假设f(z)=A*z+B,当齐次坐标的w分量为z时,那么实际上z轴的坐标为A+B/z。我们根据映射关系得到下面两个式子:
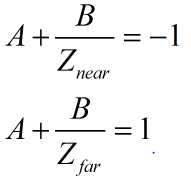
图4
再根据这两个式子,求出A和B的值(具体求解就忽略了,得到的结果就是下面矩阵第三行的两个值)。最终得到完整的透视投影变换矩阵:
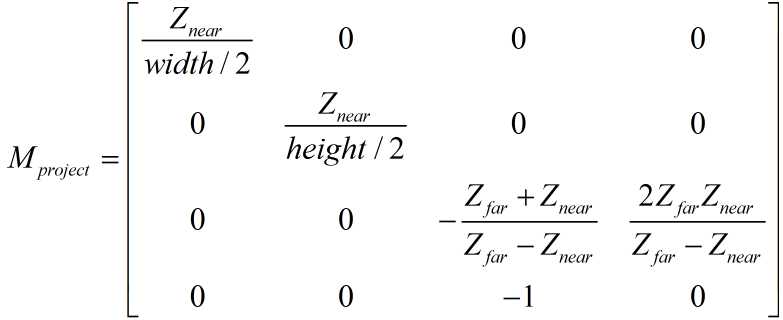
图5
我们还可以用另一种方式来表达透视投影。这种方式一共有四个变量。
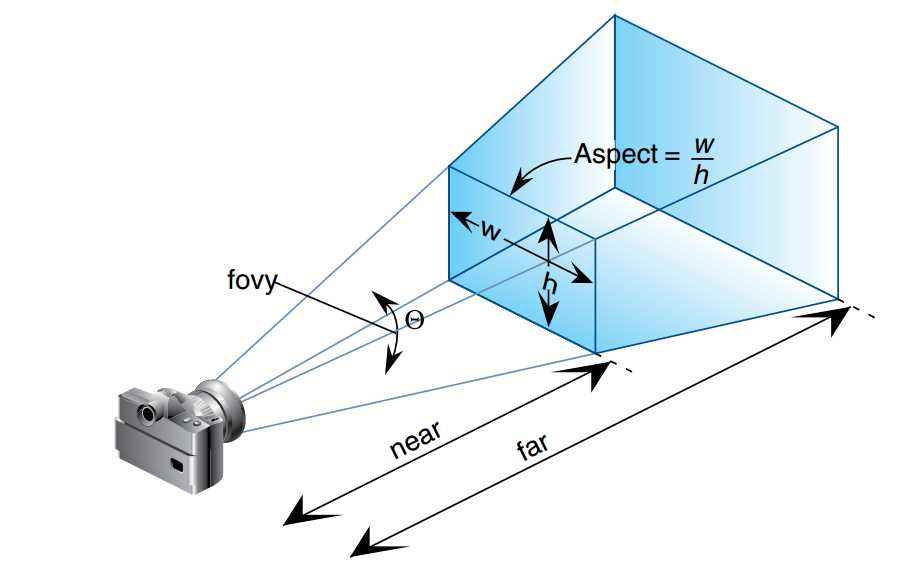
图6
这个表达下的透视投影矩阵如下(计算过程跟上面一种基本一致):
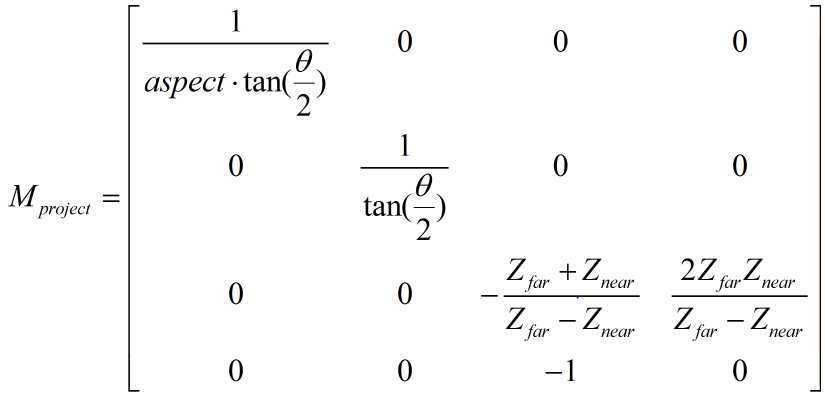
图7
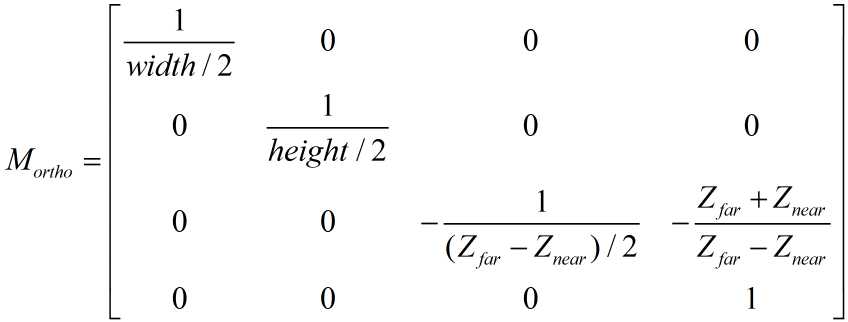
(2)正交投影变换矩阵
正交投影就比较简单了。如图8所示,显示区域就是一立方体。因为没有近大远小的特性,齐次坐标的w分量不需要变化,设为1.0就可以了。另外,我们也需要把x轴,y轴,z轴分别映射到坐标[-1,1]。计算过程也和透视投影变化矩阵类似。
详解OpenGL中的各种变换(投影变换,模型变换,视图变换)(二)——投影变换
标签:
原文地址:http://www.cnblogs.com/caster99/p/4783386.html