标签:
在OpenGL中,图元的几何变换均为线性变换,通过矩阵变换实现。OpenGL中的坐标用齐次坐标表示,即(x,y,z)表示成(x‘,y‘,z‘,h),其中x=x‘/h; y=y‘/h; z=z‘/h. 通常h取1. 比如空间中的点(2,3,4),在OpenGL中将表示成(2,3,4,1). 齐次坐标表示方式适合于矩阵运算,也很方便地表示了无穷远的点,比如(1,0,0,0)就表示x轴上无穷远的点,因为1/0是无穷大,这里约定0/0=0.
例:点(1,1,1)将该向量平移变换(2,3,4)个单位,得到(3,4,5)
矩阵表示为
1 0 0 2 1 3
0 1 0 3 * 1 = 4
0 0 1 4 1 5
左边的矩阵为平移变换矩阵,若把2、3、4换成x、y、z,则用它乘以一个齐次坐标表示的向量,就可以将该向量平移(x,y,z)个单位。把平移变换矩阵记为T(x,y,z),旋转变换矩阵记为R(x,y,z,w)。
例:
glTranslatef(50.0, 0.0, 0.0)//沿x正方向平移50。
glRotate3f(90,0.0,0.0,1.0)//沿x轴逆时针旋转90°。
矩阵表示为T(50,0,0)*R(1,0,0,90)*X.
OpenGL有个变换矩阵堆栈,先进后出,离X最近的矩阵最先作用。
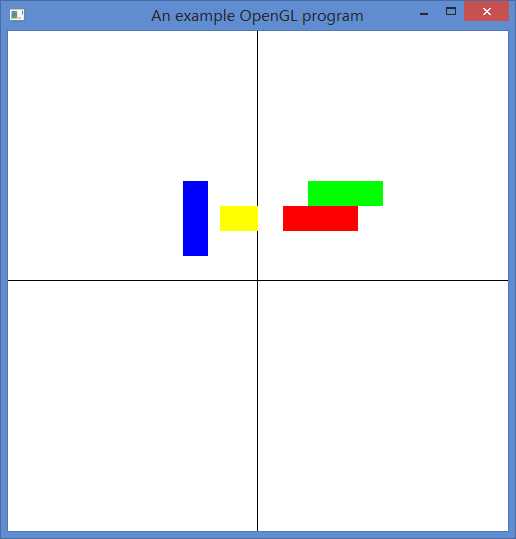
void myDisplay(void) { glMatrixMode(GL_PROJECTION); glLoadIdentity(); gluOrtho2D(-500.0, 500.0, -500.0, 500.0); glClearColor(1.0, 1.0, 1.0, 0.0); glClear(GL_COLOR_BUFFER_BIT); glMatrixMode(GL_MODELVIEW); glLoadIdentity(); glColor3f(0.0, 0.0, 0.0); glBegin(GL_LINES); glVertex2f(-500.0, 0.0); glVertex2f(500.0, 0.0); glVertex2f(0.0, -500.0); glVertex2f(0.0, 500.0); glEnd(); glColor3f(1.0, 0.0, 0.0); glRecti(50, 100, 200, 150);//initial rectangle glColor3f(0.0, 1.0, 0.0); glTranslatef(50.0, 50.0, 0.0);//translation glRecti(50, 100, 200, 150); //reset the current modelview matrix glLoadIdentity();// 重置当前矩阵为单位阵 glColor3f(0.0, 0.0, 1.0); glRotatef(90.0, 0.0, 0.0, 1.0);//rotation 逆时针 glRecti(50, 100, 200, 150); //reset the current modelview matrix glLoadIdentity(); glColor3f(1.0, 1.0, 0.0); glTranslatef(-100.0, 0.0, 0.0);//translation glScalef(0.5, 1.0, 1.0);//scale 所有x坐标缩小一半 glRecti(50, 100, 200, 150); glFlush(); }
补充:
在opengl中,函数glTranslatef的作用就是移动坐标原点。对应的3个参数对应着3个坐标轴。 如果你调用一次glTranslatef(1.0f,0.0f,0.0f)然后画一个小球,接着再调用次glTranslatef(0.0f,1.0f,0.0f)再画一个小球。 此时,两个小球中,一个在另外一个正右方。 所以,如果要使两个小球分别处于x、y轴,则需要在第二次画之前调用glLoadIdentity()函数,使坐标原点归位。
标签:
原文地址:http://www.cnblogs.com/SeekHit/p/4861168.html