标签:
先了解下如何使用PendSV异常。(为何要使用PendSV而不是其他的异常,请参考《cortex-M3权威指南》)
1,如何设定PendSV优先级?
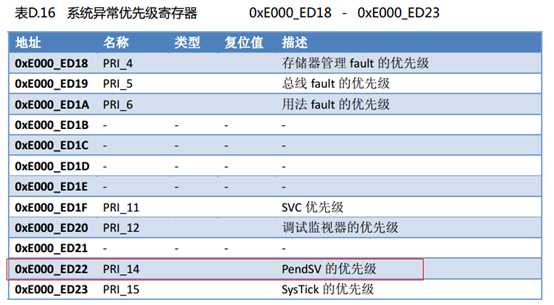
NVIC_PENDSV_PRI EQU 0xFF
LDR R0, =NVIC_SYSPRI14 LDR R1, =NVIC_PENDSV_PRI
STRB R1, [R0]
2,如何触发PendSV异常?
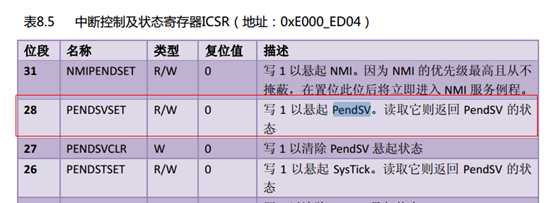
往ICSR第28位写1,即可将PendSV异常挂起。若是当前没有高优先级中断产生,那么程序将会进入PendSV handler
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
3,编写PendSV异常handler
这里用PendSV_Handler来触发LED点亮,以此证明PendSV异常触发的设置是正确的。
#include "stm32f10x_conf.h"
#define LED0 *((volatile unsigned long *)(0x422101a0)) //PA8
unsigned char flag=0;
void LEDInit(void)
{
RCC->APB2ENR|=1<<2;
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X00000003;
GPIOA->ODR|=1<<8;
}
__asm void SetPendSVPro(void)
{
NVIC_SYSPRI14 EQU 0xE000ED22
NVIC_PENDSV_PRI EQU 0xFF
LDR R1, =NVIC_PENDSV_PRI
LDR R0, =NVIC_SYSPRI14
STRB R1, [R0]
BX LR
}
__asm void TriggerPendSV(void)
{
NVIC_INT_CTRL EQU 0xE000ED04
NVIC_PENDSVSET EQU 0x10000000
LDR R0, =NVIC_INT_CTRL
LDR R1, =NVIC_PENDSVSET
STR R1, [R0]
BX LR
}
int main(void)
{
SetPendSVPro();
LEDInit();
TriggerPendSV();
while(1);
}
void PendSV_Handler(void)
{
LED0=0;
}
上述代码可以正常点亮LED,说明PendSV异常是正常触发了。
OK,是时候挑战任务切换了。
如何实现任务切换?三个步骤:
步骤一:在进入中断前先设置PSP。
curr_task = 0;
设置任务0为当前任务
__set_PSP((PSP_array[curr_task] + 16*4));
设置PSP指向task0堆栈的栈顶位置
__set_CONTROL(0x3);
设置为用户级,并使用PSP堆栈。
__ISB();
指令同步隔离,暂不知道干啥用
步骤二:将当前寄存器的内容保存到当前任务堆栈中。进入ISR时,cortex-m3会自动保存八个寄存器到PSP中,剩下的几个需要我们手动保存。
步骤三:在Handler中将下一个任务的堆栈中的内容加载到寄存器中,并将PSP指向下一个任务的堆栈。这样就完成了任务切换。
要在PendSV 的ISR中完成这两个步骤,我们先需了解下在进入PendSV ISR时,cortex-M3做了什么?
1,入栈。会有8个寄存器自动入栈。入栈内容及顺序如下:
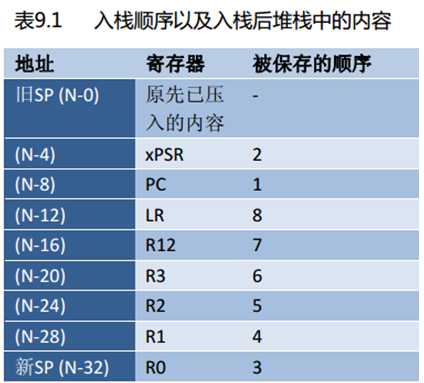
在步骤一中,我们已经设置了PSP,那这8个寄存器就会自动入栈到PSP所指地址处。
2,取向量。找到PendSV ISR的入口地址,这样就能跳到ISR了。,
3,更新寄存器内容。
做完这三步后,程序就进入ISR了。
进入ISR前,我们已经完成了步骤一,cortex-M3已经帮我们完成了步骤二的一部分,剩下的需要我们手动完成。
在ISR中添加代码如下:
MRS R0, PSP
保存PSP到R0。为什么是PSP而不是MSP。因为在OS启动的时候,我们已经把SP设置为PSP了。这样使得用户程序使用任务堆栈,OS使用主堆栈,不会互相干扰。不会因为用户程序导致OS崩溃。
STMDB R0!,{R4-R11}
保存R4-R11到PSP中。C语言表达是*(--R0)={R4-R11},R0中值先自减1,然后将R4-R11的值保存到该值所指向的地址中,即PSP中。
STMDB Rd!,{寄存器列表} 连续存储多个字到Rd中的地址值所指地址处。每次存储前,Rd先自减一次。
若是ISR是从从task0进来,那么此时task0的堆栈中已经保存了该任务的寄存器参数。保存完成后,当前任务堆栈中的内容如下(假设是task0)
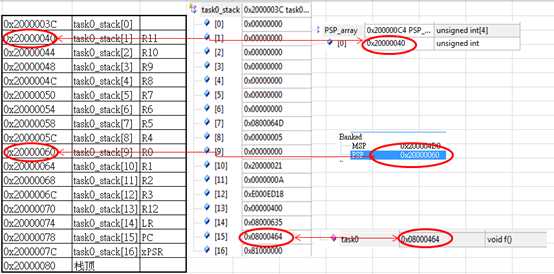
左边表格是预期值,右边是keil调试的实际值。可以看出,是一致的。在任务初始化时(步骤一),我们将PSP指向任务0的栈顶0x20000080。在进入PendSV之前,cortex-M3自动入栈八个值,此时PSP指向了0x20000060。然后我们再保存R4-R11到0x20000040~0x2000005C。
这样很容易看明白,如果需要下次再切换到task0,只需恢复R4~R11,再将PSP指向0x20000060即可。
所以切换到另一个任务的代码:
LDR R1,=__cpp(&curr_task)
LDR R3,=__cpp(&PSP_array)
LDR R4,=__cpp(&next_task)
LDR R4,[R4]
获取下一个任务的编号
STR R4,[R1]
Curr_task=next_task
LDR R0,[R3, R4, LSL #2]
获得任务堆栈地址,若是task0,那么R0=0x20000040( R0=R3+R4*4)
LDMIA R0!,{R4-R11}
恢复堆栈中的值到R4~R11。R4=*(R0++)。执行完后,R0中值变为0x20000060
LDMIA Rd! {寄存器列表} 先将Rd中值所指地址处的值送出寄存器中,Rd再自增1.
MSR PSP, R0
PSP=R0。
BX LR
中断返回
完整代码如下:
#include "stm32f10x.h" #include "stm32f10x_usart.h" #include "stm32f10x_gpio.h" #include "stm32f10x_rcc.h" #include "stdio.h" #include "misc.h" #define HW32_REG(ADDRESS) (*((volatile unsigned long *)(ADDRESS))) #define LED0 *((volatile unsigned long *)(0x422101a0)) //PA8 void USART1_Init(void); void task0(void) ; unsigned char flag=1; uint32_t curr_task=0; // 当前执行任务 uint32_t next_task=1; // 下一个任务 uint32_t task0_stack[17]; uint32_t task1_stack[17]; uint32_t PSP_array[4]; u8 task0_handle=1; u8 task1_handle=1; void task0(void) { while(1) { if(task0_handle==1) { printf("task0\n"); task0_handle=0; task1_handle=1; } } } void task1(void) { while(1) { if(task1_handle==1) { printf("task1\n"); task1_handle=0; task0_handle=1; } } } void LEDInit(void) { RCC->APB2ENR|=1<<2; GPIOA->CRH&=0XFFFFFFF0; GPIOA->CRH|=0X00000003; GPIOA->ODR|=1<<8; } __asm void SetPendSVPro(void) { NVIC_SYSPRI14 EQU 0xE000ED22 NVIC_PENDSV_PRI EQU 0xFF LDR R1, =NVIC_PENDSV_PRI LDR R0, =NVIC_SYSPRI14 STRB R1, [R0] BX LR } __asm void TriggerPendSV(void) { NVIC_INT_CTRL EQU 0xE000ED04 NVIC_PENDSVSET EQU 0x10000000 LDR R0, =NVIC_INT_CTRL LDR R1, =NVIC_PENDSVSET STR R1, [R0] BX LR } int main(void) { USART1_Init(); SetPendSVPro(); LEDInit(); printf("OS test\n"); PSP_array[0] = ((unsigned int) task0_stack) + (sizeof task0_stack) - 16*4; //PSP_array中存储的为task0_stack数组的尾地址-16*4,即task0_stack[1023-16]地址 HW32_REG((PSP_array[0] + (14<<2))) = (unsigned long) task0; /* PC */ //task0的PC存储在task0_stack[1023-16]地址 +14<<2中,即task0_stack[1022]中 HW32_REG((PSP_array[0] + (15<<2))) = 0x01000000; /* xPSR */ PSP_array[1] = ((unsigned int) task1_stack) + (sizeof task1_stack) - 16*4; HW32_REG((PSP_array[1] + (14<<2))) = (unsigned long) task1; /* PC */ HW32_REG((PSP_array[1] + (15<<2))) = 0x01000000; /* xPSR */ /* 任务0先执行 */ curr_task = 0; /* 设置PSP指向任务0堆栈的栈顶 */ __set_PSP((PSP_array[curr_task] + 16*4)); SysTick_Config(9000000); SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);//72/8=9MHZ /* 使用堆栈指针,非特权级状态 */ __set_CONTROL(0x3); /* 改变CONTROL后执行ISB (architectural recommendation) */ __ISB(); /* 启动任务0 */ task0(); //LED0=0; while(1); } __asm void PendSV_Handler(void) { // 保存当前任务的寄存器内容 MRS R0, PSP // 得到PSP R0 = PSP // xPSR, PC, LR, R12, R0-R3已自动保存 STMDB R0!,{R4-R11}// 保存R4-R11共8个寄存器得到当前任务堆栈 // 加载下一个任务的内容 LDR R1,=__cpp(&curr_task) LDR R3,=__cpp(&PSP_array) LDR R4,=__cpp(&next_task) LDR R4,[R4] // 得到下一个任务的ID STR R4,[R1] // 设置 curr_task = next_task LDR R0,[R3, R4, LSL #2] // 从PSP_array中获取PSP的值 LDMIA R0!,{R4-R11}// 将任务堆栈中的数值加载到R4-R11中 //ADDS R0, R0, #0x20 MSR PSP, R0 // 设置PSP指向此任务 // ORR LR, LR, #0x04 BX LR // 返回 // xPSR, PC, LR, R12, R0-R3会自动的恢复 ALIGN 4 } void SysTick_Handler(void) { flag=~flag; LED0=flag; if(curr_task==0) next_task=1; else next_task=0; TriggerPendSV(); } void USART1_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; USART_InitTypeDef USART_InitStructure; /* config USART1 clock */ RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE); /* USART1 GPIO config */ /* Configure USART1 Tx (PA.09) as alternate function push-pull */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); /* Configure USART1 Rx (PA.10) as input floating */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStructure); /* USART1 mode config */ USART_InitStructure.USART_BaudRate = 9600; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No ; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_Cmd(USART1, ENABLE); } int fputc(int ch, FILE *f) { USART_SendData(USART1, (unsigned char) ch); while (!(USART1->SR & USART_FLAG_TXE)); return (ch); }
测试后结果如图:
可以看出,两个任务可以切换了。
上述代码参考《cortex-M3权威指南》和《安富莱_STM32-V5开发板_μCOS-III教程》得来。
标签:
原文地址:http://www.cnblogs.com/WeyneChen/p/4891885.html