标签:
题意:三维空间中,给出两个三角形的左边,问是否相交。
面积法判断点在三角形内:

1 #include<cstdio> 2 #include<cmath> 3 #include<cstring> 4 #include<algorithm> 5 #include<iostream> 6 #include<memory.h> 7 #include<cstdlib> 8 #include<vector> 9 #define clc(a,b) memset(a,b,sizeof(a)) 10 #define LL long long int 11 #define up(i,x,y) for(i=x;i<=y;i++) 12 #define w(a) while(a) 13 const double inf=0x3f3f3f3f; 14 const double PI = acos(-1.0); 15 using namespace std; 16 17 struct Point3 18 { 19 double x, y, z; 20 Point3(double x=0, double y=0, double z=0):x(x),y(y),z(z) { } 21 }; 22 23 typedef Point3 Vector3; 24 25 Vector3 operator + (const Vector3& A, const Vector3& B) 26 { 27 return Vector3(A.x+B.x, A.y+B.y, A.z+B.z); 28 } 29 Vector3 operator - (const Point3& A, const Point3& B) 30 { 31 return Vector3(A.x-B.x, A.y-B.y, A.z-B.z); 32 } 33 Vector3 operator * (const Vector3& A, double p) 34 { 35 return Vector3(A.x*p, A.y*p, A.z*p); 36 } 37 Vector3 operator / (const Vector3& A, double p) 38 { 39 return Vector3(A.x/p, A.y/p, A.z/p); 40 } 41 42 const double eps = 1e-8; 43 int dcmp(double x) 44 { 45 if(fabs(x) < eps) return 0; 46 else return x < 0 ? -1 : 1; 47 } 48 49 double Dot(const Vector3& A, const Vector3& B) 50 { 51 return A.x*B.x + A.y*B.y + A.z*B.z; 52 } 53 double Length(const Vector3& A) 54 { 55 return sqrt(Dot(A, A)); 56 } 57 double Angle(const Vector3& A, const Vector3& B) 58 { 59 return acos(Dot(A, B) / Length(A) / Length(B)); 60 } 61 Vector3 Cross(const Vector3& A, const Vector3& B) 62 { 63 return Vector3(A.y*B.z - A.z*B.y, A.z*B.x - A.x*B.z, A.x*B.y - A.y*B.x); 64 } 65 double Area2(const Point3& A, const Point3& B, const Point3& C) 66 { 67 return Length(Cross(B-A, C-A)); 68 } 69 70 Point3 read_point3() 71 { 72 Point3 p; 73 scanf("%lf%lf%lf", &p.x, &p.y, &p.z); 74 return p; 75 } 76 77 // 点在三角形P0, P1, P2中 78 bool PointInTri(const Point3& P, const Point3& P0, const Point3& P1, const Point3& P2) 79 { 80 double area1 = Area2(P, P0, P1); 81 double area2 = Area2(P, P1, P2); 82 double area3 = Area2(P, P2, P0); 83 return dcmp(area1 + area2 + area3 - Area2(P0, P1, P2)) == 0; 84 } 85 86 // 三角形P0P1P2是否和线段AB相交 87 bool TriSegIntersection(const Point3& P0, const Point3& P1, const Point3& P2, const Point3& A, const Point3& B, Point3& P) 88 { 89 Vector3 n = Cross(P1-P0, P2-P0); 90 if(dcmp(Dot(n, B-A)) == 0) return false; // 线段A-B和平面P0P1P2平行或共面 91 else // 平面A和直线P1-P2有惟一交点 92 { 93 double t = Dot(n, P0-A) / Dot(n, B-A); 94 if(dcmp(t) < 0 || dcmp(t-1) > 0) return false; // 不在线段AB上 95 P = A + (B-A)*t; // 交点 96 return PointInTri(P, P0, P1, P2); 97 } 98 } 99 100 bool TriTriIntersection(Point3* T1, Point3* T2) 101 { 102 Point3 P; 103 for(int i = 0; i < 3; i++) 104 { 105 if(TriSegIntersection(T1[0], T1[1], T1[2], T2[i], T2[(i+1)%3], P)) return true; 106 if(TriSegIntersection(T2[0], T2[1], T2[2], T1[i], T1[(i+1)%3], P)) return true; 107 } 108 return false; 109 } 110 111 int main() 112 { 113 int T; 114 scanf("%d", &T); 115 while(T--) 116 { 117 Point3 T1[3], T2[3]; 118 for(int i = 0; i < 3; i++) T1[i] = read_point3(); 119 for(int i = 0; i < 3; i++) T2[i] = read_point3(); 120 printf("%d\n", TriTriIntersection(T1, T2) ? 1 : 0); 121 } 122 return 0; 123 }
用Barycentric坐标法判断点在三角形内(重心法)
1 #include<cstdio> 2 #include<cmath> 3 using namespace std; 4 5 struct Point3 6 { 7 double x, y, z; 8 Point3(double x=0, double y=0, double z=0):x(x),y(y),z(z) { } 9 }; 10 11 typedef Point3 Vector3; 12 13 Vector3 operator + (const Vector3& A, const Vector3& B) 14 { 15 return Vector3(A.x+B.x, A.y+B.y, A.z+B.z); 16 } 17 Vector3 operator - (const Point3& A, const Point3& B) 18 { 19 return Vector3(A.x-B.x, A.y-B.y, A.z-B.z); 20 } 21 Vector3 operator * (const Vector3& A, double p) 22 { 23 return Vector3(A.x*p, A.y*p, A.z*p); 24 } 25 Vector3 operator / (const Vector3& A, double p) 26 { 27 return Vector3(A.x/p, A.y/p, A.z/p); 28 } 29 30 const double eps = 1e-8; 31 int dcmp(double x) 32 { 33 if(fabs(x) < eps) return 0; 34 else return x < 0 ? -1 : 1; 35 } 36 37 double Dot(const Vector3& A, const Vector3& B) 38 { 39 return A.x*B.x + A.y*B.y + A.z*B.z; 40 } 41 double Length(const Vector3& A) 42 { 43 return sqrt(Dot(A, A)); 44 } 45 double Angle(const Vector3& A, const Vector3& B) 46 { 47 return acos(Dot(A, B) / Length(A) / Length(B)); 48 } 49 Vector3 Cross(const Vector3& A, const Vector3& B) 50 { 51 return Vector3(A.y*B.z - A.z*B.y, A.z*B.x - A.x*B.z, A.x*B.y - A.y*B.x); 52 } 53 double Area2(const Point3& A, const Point3& B, const Point3& C) 54 { 55 return Length(Cross(B-A, C-A)); 56 } 57 58 Point3 read_point3() 59 { 60 Point3 p; 61 scanf("%lf%lf%lf", &p.x, &p.y, &p.z); 62 return p; 63 } 64 65 // 点在三角形P0, P1, P2中 66 // http://www.blackpawn.com/texts/pointinpoly/default.html 67 bool PointInTri(const Point3& P, const Point3& P0, const Point3& P1, const Point3& P2) 68 { 69 Vector3 v0 = P2 - P0; 70 Vector3 v1 = P1 - P0; 71 Vector3 v2 = P - P0; 72 73 // Compute dot products 74 double dot00 = Dot(v0, v0); 75 double dot01 = Dot(v0, v1); 76 double dot02 = Dot(v0, v2); 77 double dot11 = Dot(v1, v1); 78 double dot12 = Dot(v1, v2); 79 80 // Compute barycentric coordinates 81 double invDenom = 1 / (dot00 * dot11 - dot01 * dot01); 82 double u = (dot11 * dot02 - dot01 * dot12) * invDenom; 83 double v = (dot00 * dot12 - dot01 * dot02) * invDenom; 84 85 // Check if point is in triangle 86 return (dcmp(u) >= 0) && (dcmp(v) >= 0) && (dcmp(u + v - 1) <= 0); 87 } 88 89 // 三角形P0P1P2是否和线段AB相交 90 bool TriSegIntersection(const Point3& P0, const Point3& P1, const Point3& P2, const Point3& A, const Point3& B, Point3& P) 91 { 92 Vector3 n = Cross(P1-P0, P2-P0); 93 if(dcmp(Dot(n, B-A)) == 0) return false; // 线段A-B和平面P0P1P2平行或共面 94 else // 平面A和直线P1-P2有惟一交点 95 { 96 double t = Dot(n, P0-A) / Dot(n, B-A); 97 if(dcmp(t) < 0 || dcmp(t-1) > 0) return false; // 不在线段AB上 98 P = A + (B-A)*t; // 交点 99 return PointInTri(P, P0, P1, P2); 100 } 101 } 102 103 bool TriTriIntersection(Point3* T1, Point3* T2) 104 { 105 Point3 P; 106 for(int i = 0; i < 3; i++) 107 { 108 if(TriSegIntersection(T1[0], T1[1], T1[2], T2[i], T2[(i+1)%3], P)) return true; 109 if(TriSegIntersection(T2[0], T2[1], T2[2], T1[i], T1[(i+1)%3], P)) return true; 110 } 111 return false; 112 } 113 114 int main() 115 { 116 int T; 117 scanf("%d", &T); 118 while(T--) 119 { 120 Point3 T1[3], T2[3]; 121 for(int i = 0; i < 3; i++) T1[i] = read_point3(); 122 for(int i = 0; i < 3; i++) T2[i] = read_point3(); 123 printf("%d\n", TriTriIntersection(T1, T2) ? 1 : 0); 124 } 125 return 0; 126 }
证明可以参考http://www.cnblogs.com/graphics/archive/2010/08/05/1793393.html
三角形的三个点在同一个平面上,如果选中其中一个点,其他两个点不过是相对该点的位移而已,比如选择点A作为起点,那么点B相当于在AB方向移动一段距离得到,而点C相当于在AC方向移动一段距离得到。
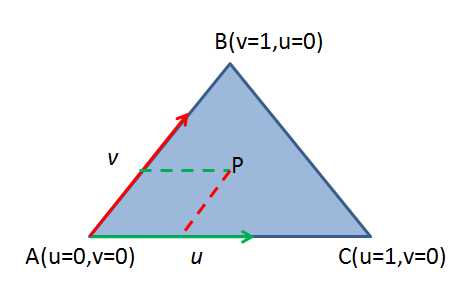
所以对于平面内任意一点,都可以由如下方程来表示
P = A + u * (C – A) + v * (B - A) // 方程1
如果系数u或v为负值,那么相当于朝相反的方向移动,即BA或CA方向。那么如果想让P位于三角形ABC内部,u和v必须满足什么条件呢?有如下三个条件
u >= 0
v >= 0
u + v <= 1
几个边界情况,当u = 0且v = 0时,就是点A,当u = 0,v = 1时,就是点B,而当u = 1, v = 0时,就是点C
整理方程1得到P – A = u(C - A) + v(B - A)
令v0 = C – A, v1 = B – A, v2 = P – A,则v2 = u * v0 + v * v1,现在是一个方程,两个未知数,无法解出u和v,将等式两边分别点乘v0和v1的到两个等式
(v2) • v0 = (u * v0 + v * v1) • v0
(v2) • v1 = (u * v0 + v * v1) • v1
注意到这里u和v是数,而v0,v1和v2是向量,所以可以将点积展开得到下面的式子。
v2 • v0 = u * (v0 • v0) + v * (v1 • v0) // 式1
v2 • v1 = u * (v0 • v1) + v * (v1• v1) // 式2
解这个方程得到
u = ((v1•v1)(v2•v0)-(v1•v0)(v2•v1)) / ((v0•v0)(v1•v1) - (v0•v1)(v1•v0))
v = ((v0•v0)(v2•v1)-(v0•v1)(v2•v0)) / ((v0•v0)(v1•v1) - (v0•v1)(v1•v0))
标签:
原文地址:http://www.cnblogs.com/ITUPC/p/4899607.html
