往期系列文章推荐:
全球主流8位MCU芯片详细解剖No.1:飞思卡尔 MC9S08AC60
简介
XC866是 新型8位微控制器系列(XC800)的第一代系列产品,集成高性能8051核、片内FLASH及功能强大的外设集。此外,XC800系列产品内部集成的片 内振荡器和支持3.3V或5.0V单电源供电的嵌入式电压调节器(EVR)进一步增强了产品性能并有效地节省了系统成本。XC866除了提供片内 FLASH的产品外,同时推出同系列兼容ROM 产品,为大批量生产提供了进一步节省成本的空间。
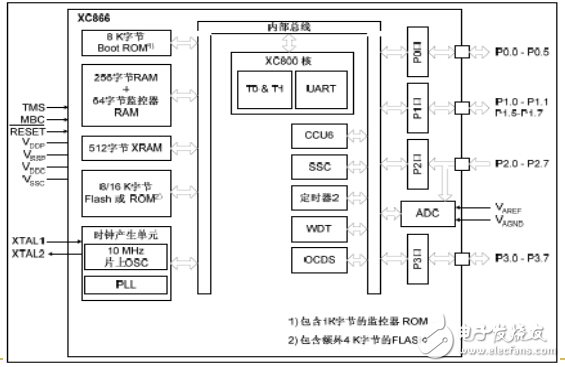
单片机结构图
引脚图
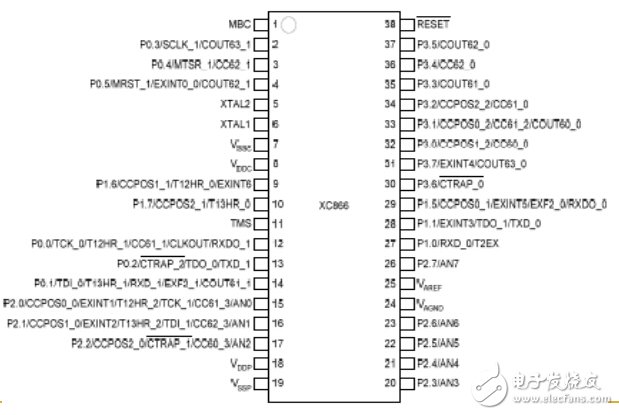
多功能引脚举例
-P0.0 引脚12
TCK_0 JTAG 时钟输入
T12HR_1 CCU6 定时器12 硬件运行输入
CC61_1 捕获/比较通道1 输入/输出
CLKOUT 时钟输出
RXDO_1 UART 发送数据输出
-P0.1 引脚14
TDI_0 JTAG 串行数据输入
T13HR_1 CCU6 定时器13 硬件运行输入
RXD_1 UART 接收数据输入
COUT61_1 捕获/比较通道1 输出
EXF2_1 定时器2 外部标志输出
模块分析
存储器结构
-8K 启动(boot)ROM 地址:C00H-E000H
-256字节片内RAM,0~7FH使用直接寻址,80~FFH使用
(1)寄存器间接寻址
-128字节SFR 地址80~FFH,使用直接寻址
-512字节XRAM 地址F000~F200,使用MOVX访问。当使用R0,R1作地址寄存器时,其XRAM地址的高位地址由寄存器XADDRH 中的值定义。
-8K/16K 程序存储器,起始地址0000
-特殊的EO寄存器操作,允许切换DPTR以及对程序ROM
-写操作(指令:MOVC @(DPTR++),A)实现软件更新
(2)基本端口结构图
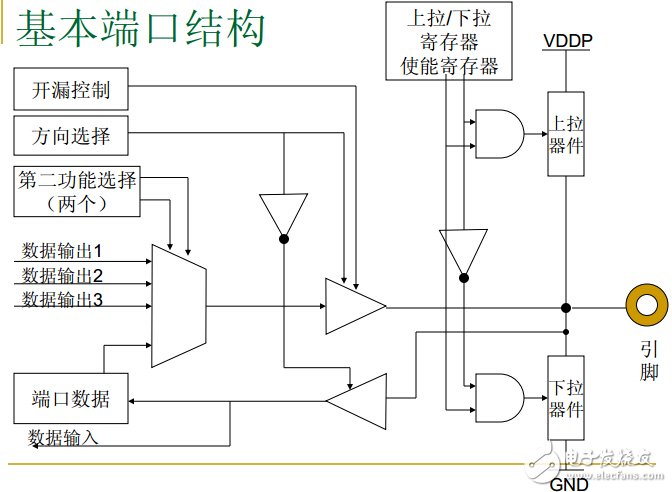
(3)端口相关寄存器
- PX_PUDSEL 上拉/下拉选择寄存器
-PX_PUDEN 上拉/下拉使能寄存器
-PX_OD 漏极开路控制寄存器
- PX_DIR 方向寄存器(P2口只能作为输入)
- PX_ALTSEL0 第二功能选择寄存器0
-PX_ALTSEL1 第二功能选择寄存器1
- PX_DATA 端口数据寄存器
其中PX的X为端口编号,寄存器都是8位,每位对应一个引脚
I2C总线和SPI总线
I2C总线和SPI总线同属于“位同步”的串行接口,但又有一些不同点:
nn I2C总线的数据信号需要:起始、停止和ACK信号,要求对方作应答
I2C总线电路链接
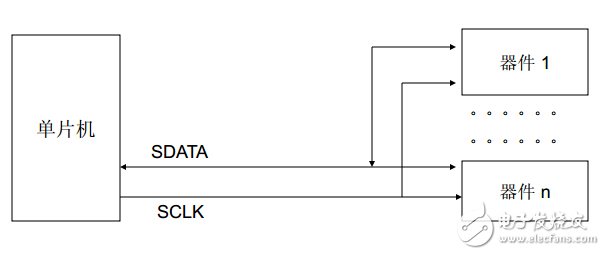
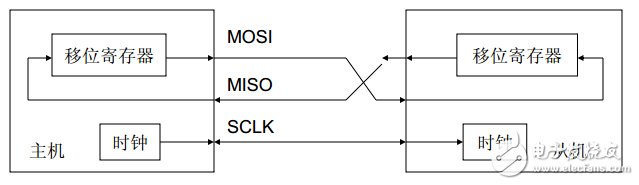
SPI总线:两条串行数据线,一条时钟线。数据线分输出和输入。对多个部芯片,还需要片选CS。
SPI总线结构
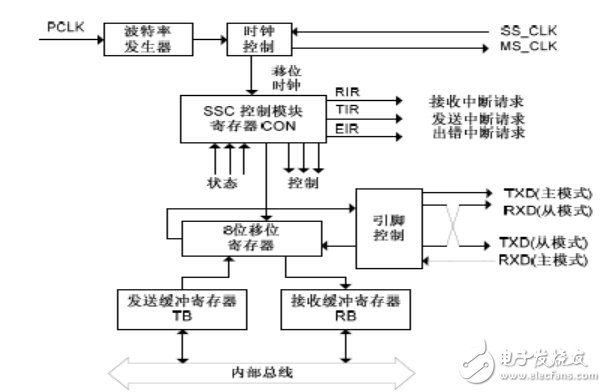
XC866的SSC
XC866具有高速同步串行通道SSC,可与SPI兼容,也可与8051串口方式0兼容;
-波特率可独立编程:它具有专用的,具有重装载功能的16位波特率发生器;
-数据宽规定为2~8位“字符”;
-可先发送LSB(与8051串口方式0兼容),也可先发送MSB(与SPI兼容);
-可在时钟的上升沿或者下降沿对数据进行移位;
-可产生移位时钟或者接收移位时钟;
-名称有所不同:MOSI=MTSR, MISO=MRST ;
SSC组成框图
数模转换器(DA)
工作原理
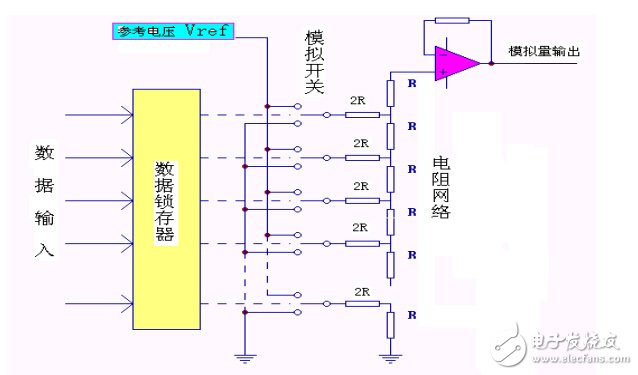
DA转换器芯片
DA转换器主要组成部分是电阻网络和相应的模拟开关阵列。
模拟量输出通常为电流输出,图中的运算放大器把电流输出转换成电压输出,按厂家设计的反馈电阻连接,输出电压与参考电压之间满足如下关系:
Vout= - Vref X (data /(2n-1))
其中:n为数字量的位数,data为输入的数字量有的芯片自带数据锁存器、自己提供参考电压。芯片型号繁多,常见的有DAC0832等。
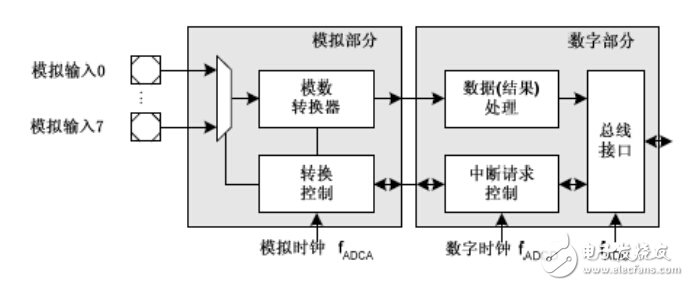
AD转换器
-逐次逼近
-8位或者10位精度,8路模拟通道
-4个独立的结果寄存器
-单次转换和自动扫描功能
-采样时钟可编程,时钟分频器可编程
-集成的采样保持电路
-数据压缩滤波
-灵活的中断产生方式,中断服务节点可配置
-可以关闭ADC模块,以便降低功耗
XC866的AD转换器框图
AD转换初始化解说
AD转换器初始化程序:
-SFR_PAGE(_ad0, noSST); // switch to page 0
-ADC_GLOBCTR = 0x70; // f32,8位宽度
-ADC_PRAR = 0x94; // 设定仲裁方式和优先
- SFR_PAGE(_ad1, noSST); // switch to page 1
-ADC_QMR0 = 0x00; // ADC模式,禁止外部触发
-ADC_CRMR1 = 0x01; // ADC模式,开启请求源
-SFR_PAGE(_ad0, noSST); // switch to page 0
-ADC_GLOBCTR |= 0x80; // 开启模拟部分
- XC866的ADC使用SFR的7个页面,每个页面占用地址CAH~CFH和D2H,D3H。随页不同具有不同的内容,用D1H作为分页寄存器,确定使用那个页。GLOBCTR和PRAR在0页,QMR0和CRMR1在6页。
可编程序计数器阵列PCA和捕获比较单元CCU
增强的定时器/计数器模块,或者多个模块组合,称为PCA/CCU
- 定时器时钟可选择:另一个定时器溢出或者固定分频器输出
-可选择捕获/比较/重装/PWM输出等多种功能
- 多个捕获/比较/重装数据寄存器组成多路PWM输出
- 捕获/溢出/匹配均可产生中断
- 单独的重装载寄存器可以设定PWM的周期
XC866的捕获比较单元CCU6
捕获/比较单元6(CCU6)中有两个独立的定时器(T12,T13)、可被用来产生脉宽调制(PWM)信号,尤其适用于控制交流电机的应用场合。CCU6 也支持一些用于块切换和多相电机的专用控制模式。
定时器T12 的3 路通道可工作在捕获和/或比较模式。定时器T13 只能工作在比较模式。
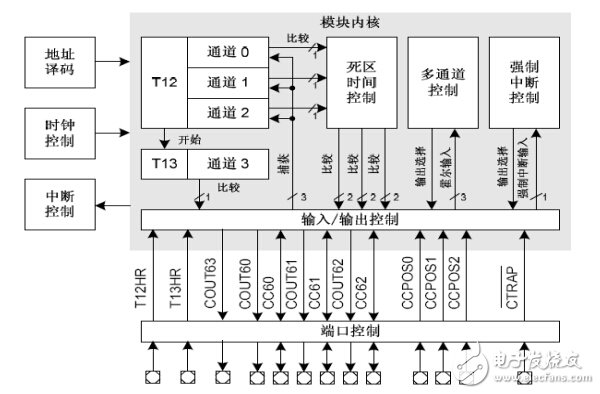
多通道控制单元产生的输出序列可由T12 和/或T13 调制。调制源可选择并组合使用。
定时器T12,T13 特性:
-定时器T12 特性:
1. 3 路捕获/比较通道,每路可用作捕获或比较通道
2. 支持产生三相PWM(6 路输出,每路信号对应上桥臂或下桥臂开关)
3. 16 位精度,最大计数频率 = 外设时钟频率
4. 单通道死区时间控制 ,避免功率级短路
5. 同步刷新T12/T13 寄存器
6. 产生中间对齐和边缘对齐PWM
-定时器T13 特性:
1. 单一比较通道,单输出
2. 16 位精度,最大计数频率 = 外设时钟频率
3. 可与T12 同步
三相马达PWM生成简单介绍
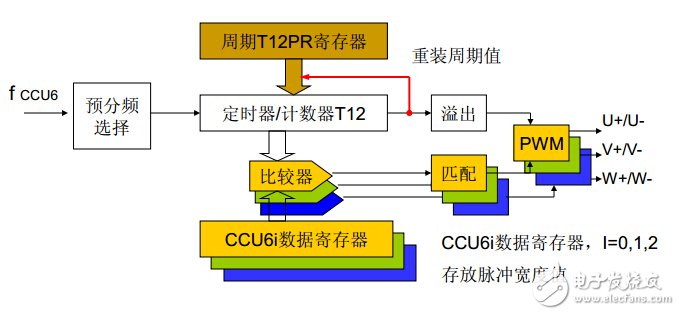
三相不同的脉宽值需实时写入CCU6i的映射寄存器CCU6iSR
U,V,W三相输出通过CCU6i和COUT6i引脚配对输出,极性相反
各种设置:时钟选择,预分频选择,死区时间,输出脚配置,以及多种模式选择,在此略讲。
三相马达SPWM信号原理
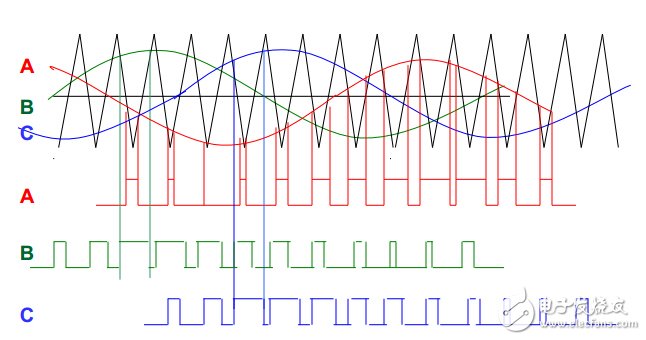
三角波称为“载波”,正弦波称为“调制波”。A,B,C三相相位差120度,他们的SPWM波形参数表其实也是相同的,但是也是差120度。
SPWM波形参数表实际就是每个三角波周期内相应的脉冲宽度
三相马达/无刷电机控制举例
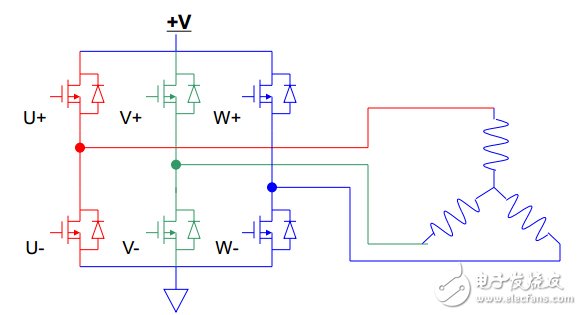
单片机CCU6输出的U+/U-;V+/V -和W+/W-经驱动后连接到IGBT。
实时改变周期和脉宽,可以达到变频目的,以及调整输出功率,从而控制马达转速。
工程师们对于XC866的使用问答:
(1)XC866 应该选择哪种IDE
A:“Miniwigger+KEIL V3破解版
keil for c51 v8
infineon dave v2.1
infineon memtool v4.01.05
fload 下载器”
(2)想用Proteus仿真英飞凌的XC866,可是元件库里没有,该怎么办?
A:“由于Proteus的元件库里没有英飞凌的MCU,自己制作比较困难,如果是其他常用器件,找一个相近的替换一下。可以采用miniwager, 是英飞凌自家的仿真器,也可以用南京伟福的Multi-Infineon仿真器。 ”
(3)英飞凌XC866中SCLK时钟问题
Q:在DAVE中SSC都已经设置好了,但在keil中编完程序进行仿真时发现SCLK始终为0,XC866不是SSC设置好就能产生时钟信号吗?
A:“自带的SPI外设,发数据的时候才会有时钟输出。”
(4)XC866 mbc 电平 ocds模式求助
Q: xc866开发板。使用ulink通过ocds接口调试,书上说:如果(MBC,TMS,P0.0)= (0,1,1),将进入OCDS 模式进行程序代码的调试。首先初始化OCDS,接下来跳转到程序存储器的地址0000H 处,执行Flash 或ROM存储器中的用户代码,开始进行调试。在OCDS 模式下,内部数据存储器的低64 字节(地址00H- 3FH)可选择映射为64 字节的监控RAM或内部数据RAM。
为什么用ulink调试时,mbc引脚为始终高电平啊,跟书上说的不一样啊。用万用表看的,难道是mbc瞬间置低电平后进入ocds模式,然后又置高。
用xc800_fload烧写程序时,必须将mbc引脚专门给接到地,要不不能烧写。
A1:“(MBC,TMS,P0.0)= (0,1,1) 指的是芯片复位后这些脚的电平,xc866在复位后会自动检测这三个脚的电平决定芯片进入下载模式、JTAG模式,还是运行程序。对于你的问题
1。 OCDS模式:你的理解可能是对的,因为MBC, TMS, P0.0都会连到Ulink, 所以我猜实际流程是这样的,Ulink先将MBC, TMS, P0.0设置为0,1,1. 然后复位芯片(Ulink 拉低Reset),释放复位芯片,这时候芯片就进入 OCDS模式了。
2。 如果MBC = 0. TMS = 0,则芯片复位后进入BSL 模式,进行串口下载(通过FLoad)”
A2:也就说,在ulink连接下,keil软件界面点击debug按钮后,ulink首先让芯片复位,然后设定MBC, TMS, P0.0为(0,1,1)让芯片进入ocds模式。进入模式后,则MBC, TMS, P0.0的设定则恢复的正常模式。这样的话,比如在断点调试时,人为的按下reset键后,芯片可以进入正常运行模式,程序在正常运行,而不是又进入ocds模式。
而fload模式,从电路上看,mbc只能被ulink的ocds信号控制,所以需要人工的加低电平,并且烧完程序后,程序是不能运行。
XC86相关资料下载: