标签:
这两天折腾CTS/RTS硬件流控,看到说232协议的CTS/RTS只是用来做半双工换向使用的。正好手头上有块stm32的板子,看了看stm32的Usart,竟然发现支持的是单线半双工。232里面毕竟4根线,支持半双工也是各自独立地物理信道(大胆猜测,回头回顾一下以前草草使用的双线485,看看它的半双工)。第一次注意到。之所以引起我的兴趣,是因为,我好奇stm32的单线半双工有2点。
第一:有啥用。结果上网一搜,还真有人用它来控制AX-12数字舵机。
第二:怎么实现的。我印象中stm32的io口是需要配置方向的。单线半双工需要两端即当输入又当输出。操作不当很容易把IO口的mos管烧掉啊。
于是折腾了半天。最后确实调通了。管子也没烧。
参考手册上关于这块,很简单说的。
单线半双方模式通过设置USART_CR3寄存器的HDSEL位选择。在这个模式里,下面的位必须保持清零状态:
● USART_CR2寄存器的LINEN和CLKEN位
● USART_CR3寄存器的SCEN和IREN位
USART可以配置成遵循单线半双工协议。在单线半双工模式下,TX和RX引脚在芯片内部互连。使用控制位”HALF DUPLEX SEL”(USART_CR3中的HDSEL位)选择半双工和全双工通信。
当HDSEL为’1’时
● RX不再被使用
● 当没有数据传输时,TX总是被释放。因此,它在空闲状态的或接收状态时表现为一个标准I/O口。这就意味该I/O在不被USART驱动时,必须配置成悬空输入(或开漏的输出高)。
除此以外,通信与正常USART模式类似。由软件来管理线上的冲突(例如通过使用一个中央仲裁器)。特别的是,发送从不会被硬件所阻碍。当TE位被设置时,只要数据一写到数据寄存器上,发送就继续。
基本上比较模糊,但是也能猜出个大概。也就是双方的USart通过TX-Tx相连。而且Tx管脚IO状态设置成悬空输入(或开漏的输出高)。这个地方其实出现了个问题,因为手册第9章GPIO配置的地方明确写道:
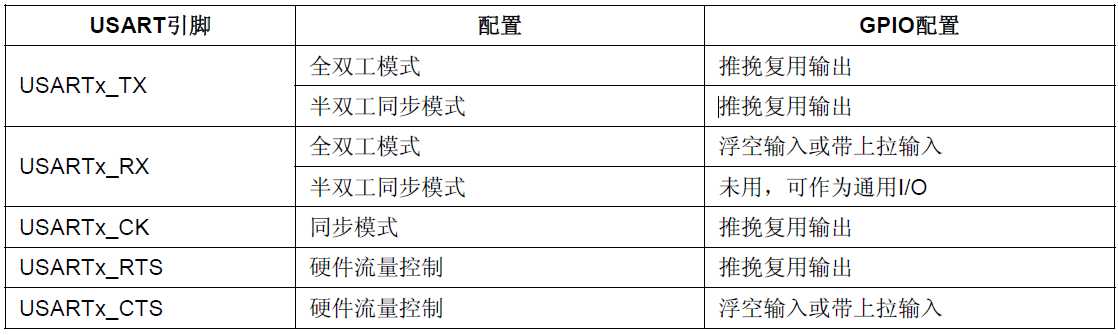
Tx管脚在用作半双工模式时,GPIO应该设为推挽复用输出。所以这个悬空输入其实是有问题的。因为手册上写道:
当I/O端口配置为输入时:
● 输出缓冲器被禁止
● 施密特触发输入被激活
● 根据输入配置(上拉,下拉或浮动)的不同,弱上拉和下拉电阻被连接
● 出现在I/O脚上的数据在每个APB2时钟被采样到输入数据寄存器
● 对输入数据寄存器的读访问可得到I/O状态
也就是说输出根本输出不来。所以这里使用复用推挽输出或者复用开漏输出。我估计很多人就是管脚没配置对所以没调通。。。而且既然一定要外接上拉电阻至3.3V,不仅是开漏输出,复用推挽也是,实践证明,不然通信失败。
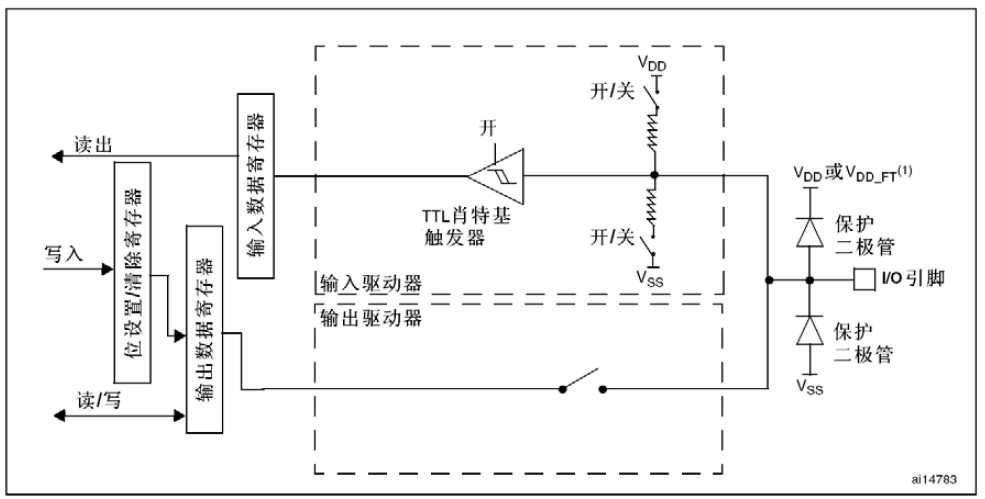
开漏输出好理解,加上拉后可以输出正常高低电平,而且stm32的IO口设置成开漏输出后,其实是双向的,这点可以从下图看出。手册上说配置成输出后,采样输入数据寄存器里的值即可得到IO状态。
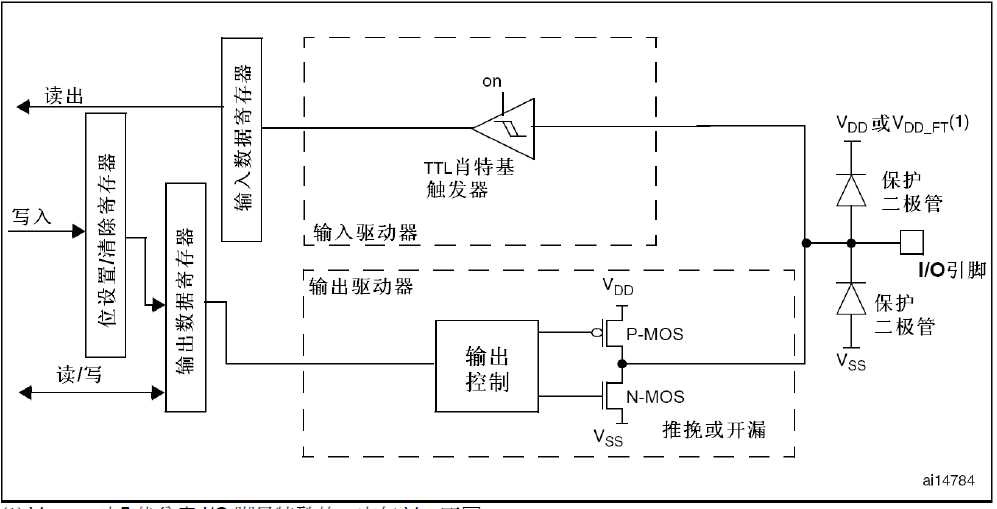
从图上还可以看到。IO管脚内部是有稳压管的。有的管脚会被稳压到3.3VVDD,有的会被稳压到5V,VDD_FT,所以网上说什么上拉至5V其实指得是在FT管脚上才能实现的,不然再上拉也拉不上去。顶多3.3,再多就烧了。
单向半双工(Half Deplux)的实现也比较简单,代码如下。
int main(void) { usart_Configuration(); while(NbrOfDataToRead2--) { /* Wait until end of transmit */ while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET) { } /* Write one byte in the USARTy Transmit Data Register */ USART_SendData(USART1, TxBuffer1[TxCounter1++]); // GPIO_SetBits(GPIOB,GPIO_Pin_0); /* Wait the byte is entirely received by USARTz */ while(USART_GetFlagStatus(USART2, USART_FLAG_RXNE) == RESET) { } /* Store the received byte in the RxBuffer2 */ RxBuffer2[RxCounter2++] = USART_ReceiveData(USART2); //GPIO_SetBits(GPIOB,GPIO_Pin_0); } USART_ReceiveData(USART1); while(NbrOfDataToRead1--) { /* Wait until end of transmit */ while(USART_GetFlagStatus(USART2, USART_FLAG_TXE)== RESET) { } /* Write one byte in the USARTz Transmit Data Register */ USART_SendData(USART2, TxBuffer2[TxCounter2++]); /* Wait the byte is entirely received by USARTy */ while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE) == RESET) { } /* Store the received byte in the RxBuffer1 */ RxBuffer1[RxCounter1++] = USART_ReceiveData(USART1); } /* Check the received data with the send ones */ TransferStatus1 = Buffercmp(TxBuffer1, RxBuffer2, TxBufferSize1); if(TransferStatus1) {GPIO_SetBits(GPIOB,GPIO_Pin_0);} /* TransferStatus = PASSED, if the data transmitted from USARTy and received by USARTz are the same */ /* TransferStatus = FAILED, if the data transmitted from USARTy and received by USARTz are different */ TransferStatus2 = Buffercmp(TxBuffer2, RxBuffer1, TxBufferSize2); if(TransferStatus2) {GPIO_SetBits(GPIOB,GPIO_Pin_1);} while (1) { } //IO配置部分 void Rcc_Configuration(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE); } void UsartGPIO_Configuration(void) { GPIO_InitTypeDef GPIO_InitStructure; GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE); GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //Tx1 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOD, &GPIO_InitStructure);//Tx2 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_Init(GPIOB, &GPIO_InitStructure); //PB0---LED0 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; GPIO_Init(GPIOB, &GPIO_InitStructure); //PB1---LED1s } void usart_Configuration(void) { USART_InitTypeDef USART_InitStructure; Rcc_Configuration(); UsartGPIO_Configuration(); USART_InitStructure.USART_BaudRate = 230400; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_Parity = USART_Parity_No; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; USART_Init(USART1, &USART_InitStructure); USART_Init(USART2, &USART_InitStructure); USART_HalfDuplexCmd(USART1,ENABLE); USART_HalfDuplexCmd(USART2,ENABLE); USART_Cmd(USART1, ENABLE); USART_Cmd(USART2, ENABLE); }
最后,but也是我没想明白的地方。为什么设置成复用推挽输出,依旧能通信成功而且没烧掉mos管。这里我猜测,是由于虽然你设置了管脚位推挽输出,但是你也设置了HalfDelpux模式,其实Tx这时候默认其实是输入的。只有在你往发送数据寄存器TDR里面写入数据时,标志位TXE置1,然后由硬件将IO口设置成推挽输出。这样对面Tx仍然是输入,所以能够通信输出,不存在mos管被短路的可能性存在。但是手册上没有更详细的介绍了。所以只能是个人猜测。
标签:
原文地址:http://www.cnblogs.com/zurphy/p/4918589.html