标签:
相机的标定对于测距和重建还是很重要的,特把用过的工具和方法进行一次汇总,以便查阅、分析和讨论(本人扣扣1256635840)
—————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————
1.MATLAB camera calibration toolbox工具箱
我只使用了13张图片
将TOOLBOX_calib放入MATLAB的toolbox目录下,工作目录设为含标定图集的目录。
1.1单目标定
运行calib_gui.m文件,选择添加到路径,界面:
 选择第一个后,界面:
选择第一个后,界面:

通过读图和提取角点后点击calibration进行初始标定
标定的初始化如下:
Calibration parameters after initialization:
Focal Length: fc = [ 532.49170 532.49170 ]
Principal point: cc = [ 319.50000 239.50000 ]
Skew: alpha_c = [ 0.00000 ] => angle of pixel = 90.00000 degrees
Distortion: kc = [ 0.00000 0.00000 0.00000 0.00000 0.00000 ]
得到的标定结果如下:
Calibration results after optimization (with uncertainties):
Focal Length: fc = [ 534.97637 536.20121 ] +/- [ 3.71984 3.92117 ]
Principal point: cc = [ 343.26051 233.07723 ] +/- [ 4.11643 4.58569 ]
Skew: alpha_c = [ 0.00000 ] +/- [ 0.00000 ] => angle of pixel axes = 90.00000 +/- 0.00000 degrees
Distortion: kc = [ -0.32075 0.27300 0.00104 -0.00074 0.00000 ] +/- [ 0.02040 0.07372 0.00103 0.00126 0.00000 ]
Pixel error: err = [ 0.55364 0.23137 ]
这里对这5个参数进行说明
(详见链接http://www.vision.caltech.edu/bouguetj/calib_doc/htmls/parameters.html)
(1)fc为焦距的像素尺寸,计算为F/DX,F/DY,F为几何焦距尺寸,DX,DY为像元尺寸。(懒得敲公式>.<)
(2)cc为光心在图像坐标系下的图像坐标
(3)alpha_c扭曲系数,这里好像是用来测垂直度的,不是很明确(??)
(4)kc畸变系数,这里有5个,前两个和最后一个为径向畸变,第三和第四个为切向畸变,一般第五个为0,切向畸变也很小
(5)err像素误差,可以看到这里小于一个像素尺寸
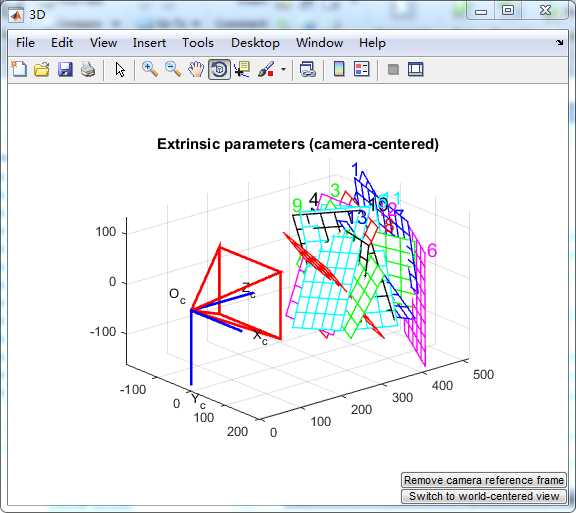
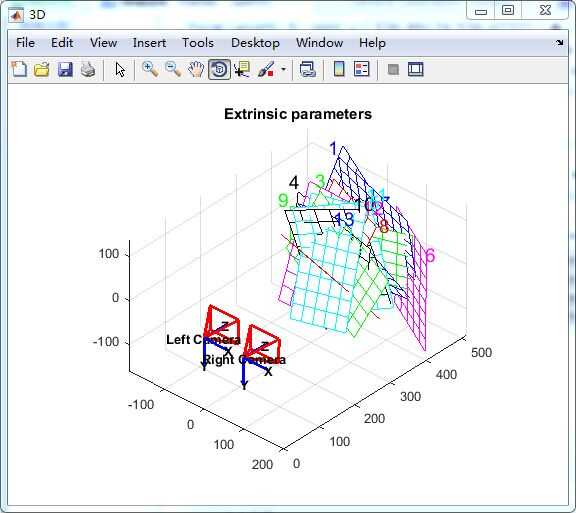
点击show extrinsic,得到相机和标定板的相对位置关系:
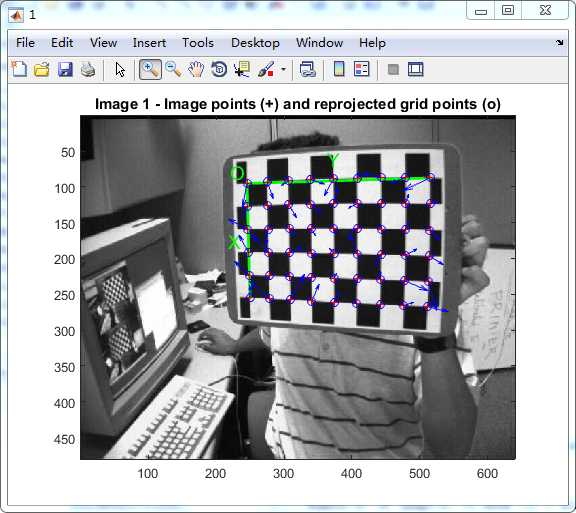
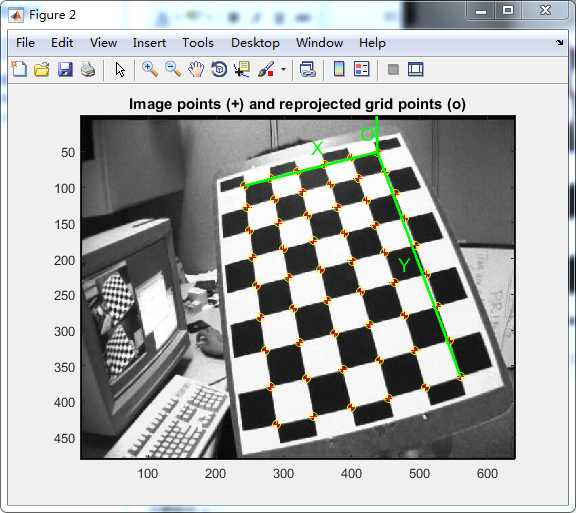
点击reproject on images,根据当前标定的结果和棋盘世界尺寸,得到反投影到图像上的角点图
误差图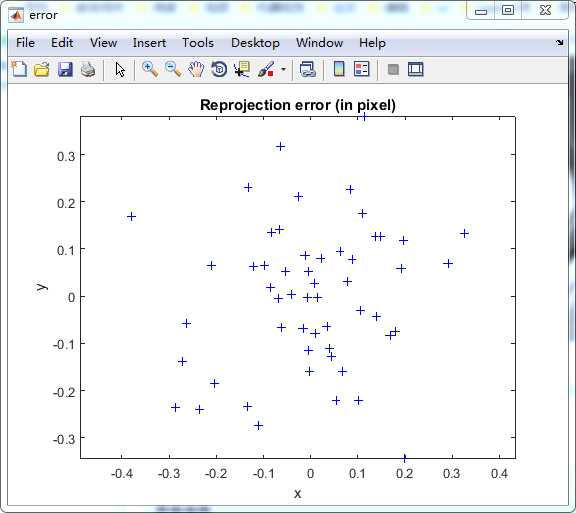
点击analyse error,对误差进行分析
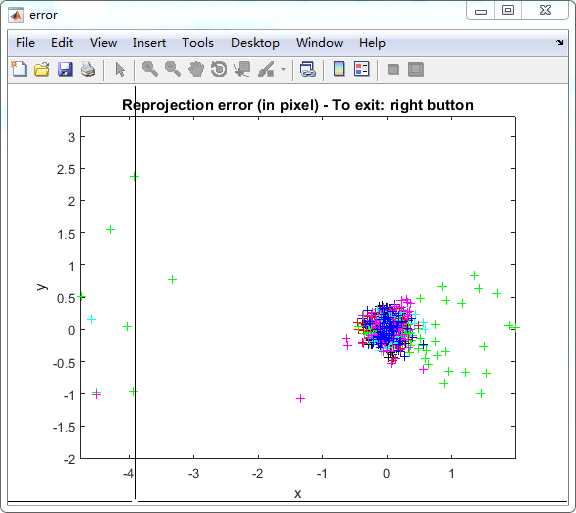
点击图上角点的相关信息,一种颜色代表一副图,nnd绿色是什么鬼,随机点击绿色点
Selected image: 3
Selected point index: 18
Pattern coordinates (in units of (dX,dY)): (X,Y)=(5,6)
Image coordinates (in pixel): (449.80,357.74)
Pixel error = (0.85299,0.66929)
Window size: (wintx,winty) = (5,5)
第三张图我做了啥—。—
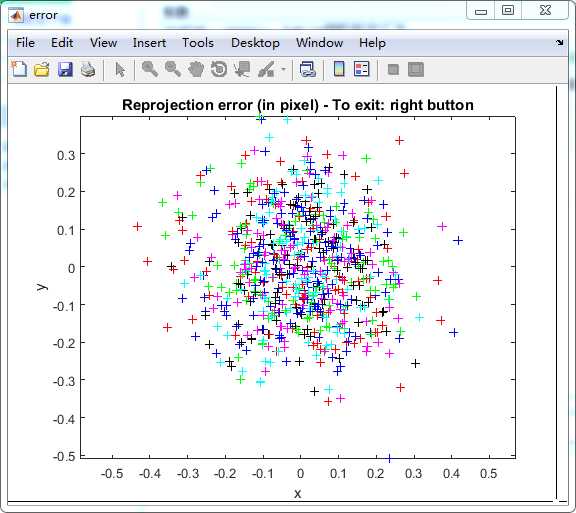
初次标定的效果还算满意,进行一次recomp.corners,对角点进行校正,一路空格。
然后再次标定,得到结果
Calibration results after optimization (with uncertainties):
Focal Length: fc = [ 533.09010 533.21564 ] +/- [ 1.20347 1.26428 ]
Principal point: cc = [ 342.48318 233.86838 ] +/- [ 1.34457 1.48320 ]
Skew: alpha_c = [ 0.00000 ] +/- [ 0.00000 ] => angle of pixel axes = 90.00000 +/- 0.00000 degrees
Distortion: kc = [ -0.29000 0.10044 0.00121 -0.00016 0.00000 ] +/- [ 0.00646 0.02256 0.00032 0.00041 0.00000 ]
Pixel error: err = [ 0.13682 0.13975 ]
效果好了很多
点击save保存标定结果Calib_Results.mat,以供后续的双目标定。
个人感觉此方法标定结果效果更优,可以将MATLAB标定结果转为opencv可处理的xml文件后在vs下进行编程。
工具界面后两排都是一些简单操作,我也简单介绍下
第三排是基本操作:
加减图、保存标定结果、载入标定结果、退出
第四排是小步操作:
获取单图外参、矫正图像、输出标定数据、显示标定结果
这里说下前两个,后两个就是点来看看,不说了
第一个comp.extrinsic是获取单图片的外参,这一步需要相机的标定结果,根据结果获得相机和该图的位置关系。
点击后得到comp.extrinsic后
输入图像的全名,不带格式,第二个提示为格式
然后操作如上,完成后得到以棋盘为世界坐标的相机-世界坐标的外参
Extrinsic parameters:
Translation vector: Tc_ext = [ 70.077058 -137.151501 379.099782 ]
Rotation vector: omc_ext = [ -0.341265 -2.948410 0.719537 ]
Rotation matrix: Rc_ext = [ -0.971247 0.194743 -0.136943
0.235933 0.864274 -0.444260
0.031840 -0.463796 -0.885370 ]
Pixel error: err = [ 0.11455 0.17418 ]
参数说明:
(1)Tc_ect为平移矢量,这里相机模型不再详述
(2)omc_ext为旋转矢量
(3)Rc_ext为旋转矩阵,Rc_ext = rodrigues(omc_ext).这里进行了 rodrigues变换
(4)err为像素误差
世界坐标系见图,Z轴的标注被吃了:
第二个为undistort image
得到矫正后的图像,并会保存在标定图集的路径下。
经过以上步骤,单目标定结束
点击exit退出
然后标定右相机,做好将左右图集用两个文件夹保存,得到标定结果文件。对两个结果文件重命名,加标注left和right
————————————————————————————————————————————————————————————————————————————
1.2双目标定
打开stereo_gui.m
操作界面:
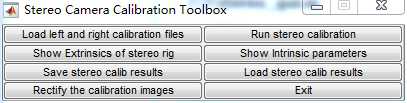
点击load left and right calibration files
然后运行run stereo calibration,进行全局优化的双目标定(?为正负号)
Stereo calibration parameters after optimization:
Intrinsic parameters of left camera:
Focal Length: fc_left = [ 533.56169 533.59560 ] ? [ 0.92519 0.94450 ]
Principal point: cc_left = [ 342.53093 234.76465 ] ? [ 1.35047 1.34582 ]
Skew: alpha_c_left = [ 0.00000 ] ? [ 0.00000 ] => angle of pixel axes = 90.00000 ? 0.00000 degrees
Distortion: kc_left = [ -0.28866 0.09366 0.00120 -0.00014 0.00000 ] ? [ 0.00681 0.02389 0.00031 0.00037 0.00000 ]
Intrinsic parameters of right camera:
Focal Length: fc_right = [ 536.89174 536.47377 ] ? [ 0.97335 0.96952 ]
Principal point: cc_right = [ 327.39289 249.94526 ] ? [ 1.44008 1.30625 ]
Skew: alpha_c_right = [ 0.00000 ] ? [ 0.00000 ] => angle of pixel axes = 90.00000 ? 0.00000 degrees
Distortion: kc_right = [ -0.29010 0.10622 -0.00051 0.00010 0.00000 ] ? [ 0.00531 0.00958 0.00025 0.00062 0.00000 ]
Extrinsic parameters (position of right camera wrt left camera):
Rotation vector: om = [ 0.00715 0.00427 -0.00351 ] ? [ 0.00298 0.00336 0.00032 ]
Translation vector: T = [ -99.81327 1.10181 -0.14312 ] ? [ 0.15469 0.12424 0.54609 ]
这里om和T:
om表示右摄像头相对于左摄像头的旋转角度,即以左相机为参考系
T表示右摄像头相对于左摄像头的平移量,也以左相机为参考系(??此处存疑)
得到两相机的相对位置
点击save stereo calibration results保存双目标定结果,即完成了MATLAB calibration toolbox工具箱的双目标定。
—————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————
2.MATLAB 更新的应用stereo camera calibrator
本人使用MATLAB2015版

然后自动提取角点,得到对应图像对。这里该工具箱需要保证标定板的X向和Y向的方格数要有一个为偶数,一个为奇数。
结果只检测到7组。囧
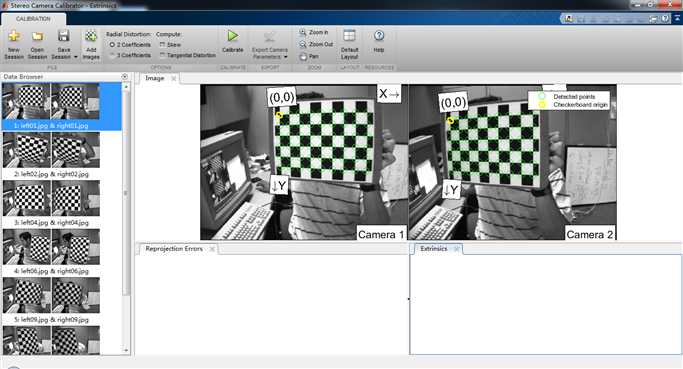
该工具设长轴为X轴
点击标定,得到reprojection errors和extrinsics

点击输出标定参数
得到标定的结果
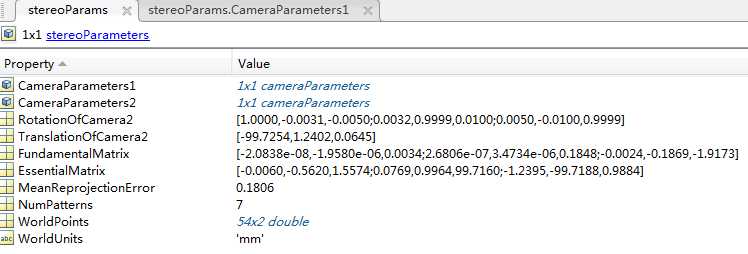
可以看到有相机内参数、两相机的旋转平移矩阵、基础矩阵、本质矩阵、平均反投影误差、标定数量、角点数、单位
点击cameraParameters,查看左相机的内参数
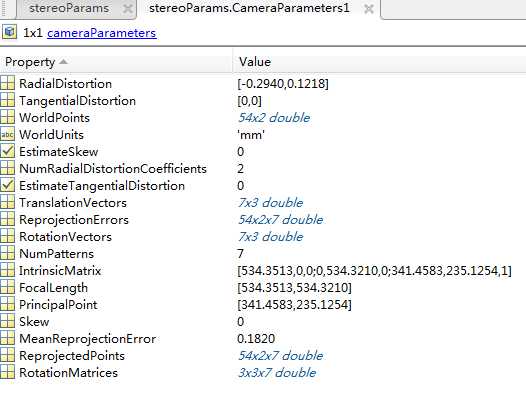
径向畸变,切向畸变,世界点,单位,扭曲系数,径向畸变参数数,切向畸变参数数,7张图的平移矢量,7张图的反投影误差,7张图的旋转矢量,图片数量,内参数矩阵,焦距的像素尺寸,主点的像素坐标,扭曲系数,平均反投影误差,投影点,7张图的旋转矩阵
生成mat文件运行得到标定结果
Camera 1 Intrinsics
-------------------
Focal length (pixels): [ 534.3513 +/- 0.4050 534.3210 +/- 0.3959 ]
Principal point (pixels):[ 341.4583 +/- 0.5920 235.1254 +/- 0.5816 ]
Radial distortion: [ -0.2940 +/- 0.0028 0.1218 +/- 0.0092 ]
Camera 2 Intrinsics
-------------------
Focal length (pixels): [ 537.2223 +/- 0.4180 536.8958 +/- 0.4019 ]
Principal point (pixels):[ 325.8371 +/- 0.6577 251.4986 +/- 0.5598 ]
Radial distortion: [ -0.2894 +/- 0.0018 0.1048 +/- 0.0040 ]
Position And Orientation of Camera 2 Relative to Camera 1
---------------------------------------------------------
Rotation of camera 2: [ 1.0000 +/- 0.0012 0.0032 +/- 0.0014 0.0050 +/- 0.0001 ]
Translation of camera 2 (mm): [ -99.7254 +/- 0.0708 1.2402 +/- 0.0580 0.0645 +/- 0.2536 ]
可以看出和calibration toolbox的功能基本一致,角点的提取更加智能化,但提取的效果不是很理想,13张图只检测到了7张,使用上会更加方便
—————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————
3.opencv相机标定
opencv相机标定的参考很多,这里就不再给出链接,自行百度
大概步骤如下:
(1)opencv标定需要对图像的大小,角点的个数,方格的实际尺寸,图像的数量,棋盘的世界坐标等等进行初始化
(2)使用findChessboardCorners进行角点的提取
(3)使用cornerSubPix提取角点子像素级精度
(4)保存每幅图片的角点和世界坐标点
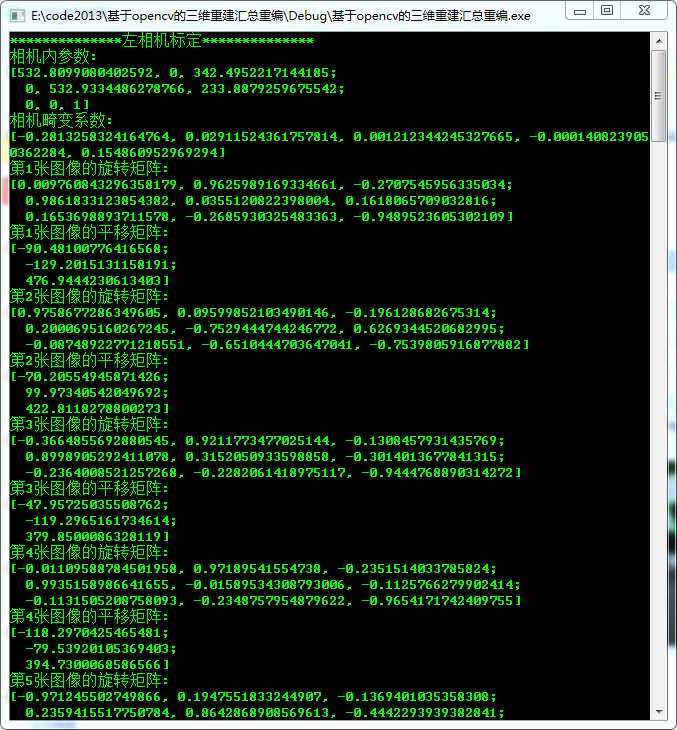
(5)使用calibrateCamera进行单相机的标定
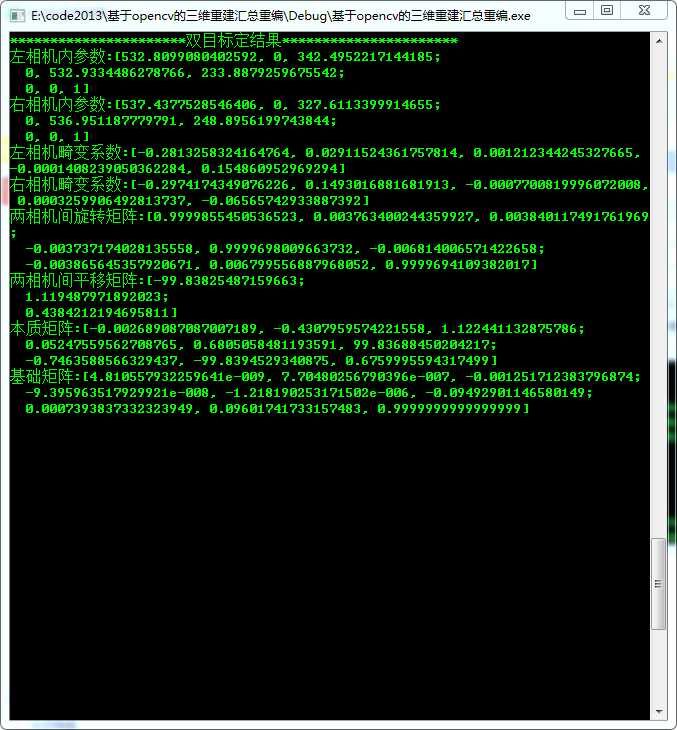
(6)使用 stereoCalibrate进行双目标定
这里对calibrateCamera的标定标志位进行注释
//标志位
/*CV_CALIB_USE_INTRINSIC_GUESS -内参数矩阵包含fx,fy,cx和cy的初始值。否则,(cx, cy)被初始化到图像中心(这儿用到图像大小),焦距用最小平方差方式计算得到。注意,如果内部参数已知,没有必要使用这个函数,使用cvFindExtrinsicCameraParams2则可。
CV_CALIB_FIX_PRINCIPAL_POINT - 主点在全局优化过程中不变,一直在中心位置或者在其他指定的位置(当CV_CALIB_USE_INTRINSIC_GUESS设置的时候)。
CV_CALIB_FIX_ASPECT_RATIO - 优化过程中认为fx和fy中只有一个独立变量,保持比例fx/fy不变,fx/fy的值跟内参数矩阵初始化时的值一样。在这种情况下, (fx, fy)的///实际初始值或者从输入内存矩阵中读取(当CV_CALIB_USE_INTRINSIC_GUESS被指定时),或者采用估计值(后者情况中fx和fy可能被设置为任意值,只有比值被使用)。
CV_CALIB_ZERO_TANGENT_DIST – 切向形变参数(p1, p2)被设置为0,其值在优化过程中保持为0。*/
这里选默认值0。
尺寸设为30,单位为mm。
角点提取的效果如下
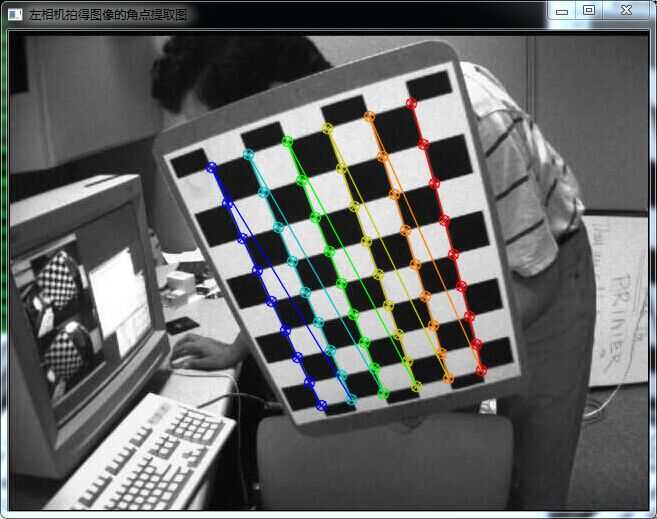


可以看出,以上的方法偏差都不大。
这里像素误差、畸变矫正、极线校正的程序运行结果我没有给出,待续。。。
—————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————————
4.halcon标定
halcon作为牛逼的机器视觉工业软件,标定自然也是不能少
由于没有halcon的标定板图,使用halcon自带的示例进行说明(坑啊)halcon的标定板有些不同
一般步骤:
(1)初始化参数
(2)使用 find_caltab找到标定板区域
(3)使用find_marks_and_pose找到标记和位姿
(4)使用disp_caltab利用相机内外参数,把标定板模型投影到图像平面,显示标定点和连接线,X,Y轴也被显示出来
(5)使用binocular_calibration进行双目标定
binocular_calibration (X, Y, Z, RowsL, ColsL, RowsR, ColsR, StartCamParL, StartCamParR, StartPosesL, StartPosesR, ‘all‘, CamParamL, CamParamR, NFinalPoseL, NFinalPoseR, cLPcR, Errors)
(6)得到左、右相机的内参数和相对位姿、误差如下(这里标定板的选取不一致,和上面便不进行比较):

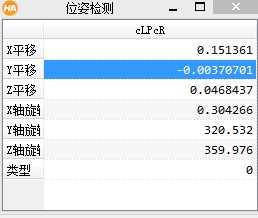
errors为0.0154181,这里的标定图片效果很好,所以误差没有比较的意义,但精度应该很高
以上便是目前常用的几种标定方法。
标签:
原文地址:http://www.cnblogs.com/damocles/p/4952223.html