标签:
一:tiny4412串口驱动编写
1、串口通信简介
串口通信指串口按位(bit)发送和接收字节,串口通信的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线 接收数据。它很简单并且能够实现远距离通信。比如IEEE488定义并行通行状态时,规定设备线总长不得超过20米,并且任意两个设备间的长度不得超过2 米;而对于串口而言,长度可达1200米。
串口通信所采用的通信协议为RS-232,RS-232通信方式允许简单连接三线:Tx、Rx和地线。但是对于数据传输,双方必须对数据定时采用使用相同的波特率。RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。可用于许多用途,比如连接鼠标、打印机或者Modem,同时也 可以接工业仪器仪表。用于驱动和连线的改进,实际应用中RS-232的传输长度或者速度常常超过标准的值。RS-232只限于PC串口和设备间点对点的通信。
2、串口的通信基本模型如下图所示:
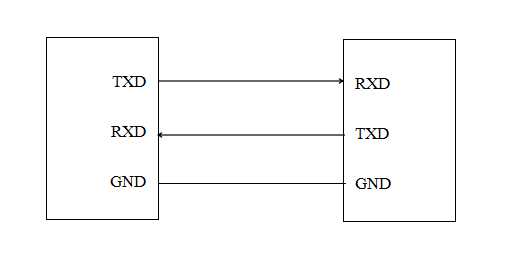
TXD:发送数据
RXD:接收数据
GND:地线
串口驱动跟其他外设的驱动配置流程差不多,大概分为如下几步:
(1)查看电路图,配置相应的gpio功能引脚
(2)配置串口控制器的相应寄存器
(3)测试串口接收、发送
今天用的是第一个串口com0,下面是电路图:
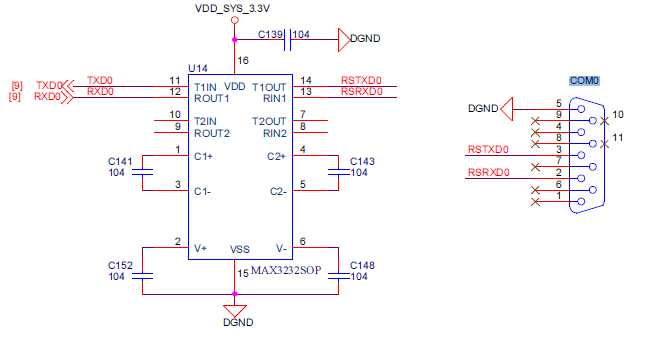
找到相应的gpio功能引脚

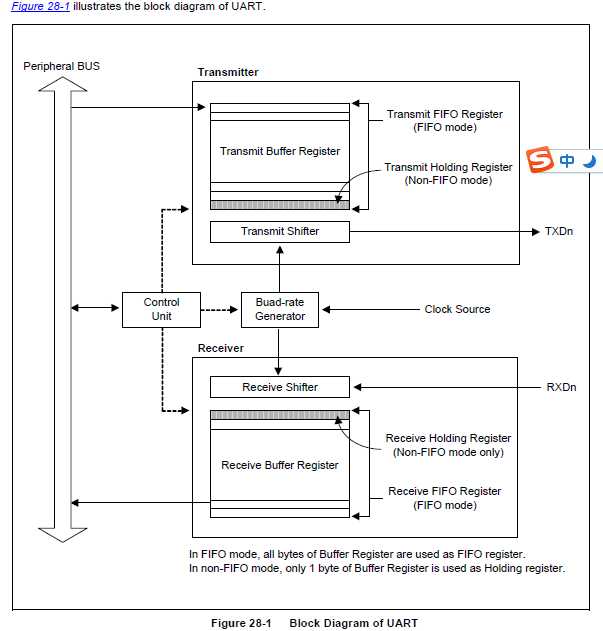
下面是串口工作的整个模式图:
下面是串口控制器相应的寄存器:
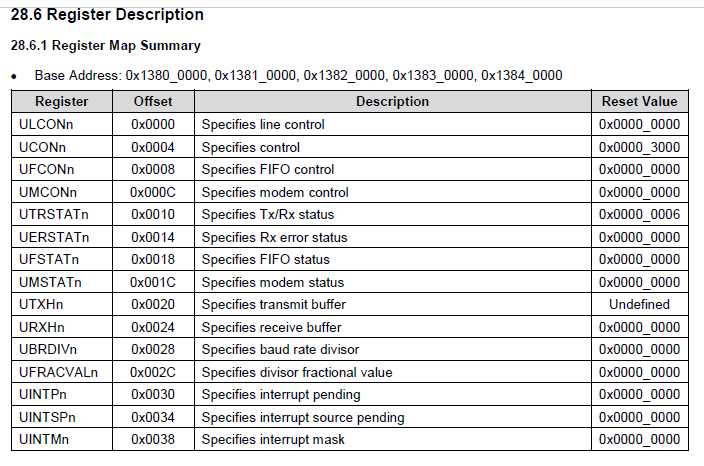
今天我们实验用到的几个主要的寄存器是:
ULCON0:数据格式控制寄存器(配置数据位,停止位,校验位等);
UCON0:串口控制开关
UTXH0:发送数据
URXH0:接收数据
UTRSTAT0:数据收发状态寄存器
UBRDIV0,UFRACVAL0:配置波特率的
下面是uart所需要的工作得时钟频率,以及比特率计算公式:
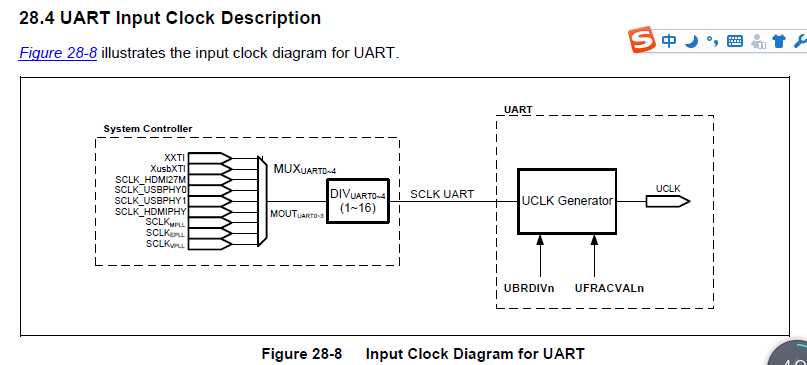
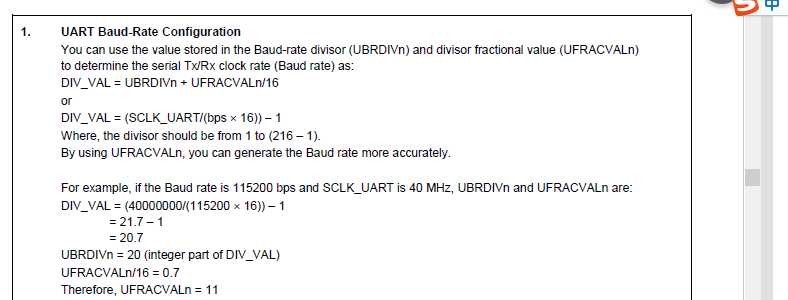
经过计算uart所采用的SCLK_UART为100M
UBRDIV0=(100000000)/(115200 x16) - 1 = 53.3=53=0x35;
UFRACVAL0= 4;
下面具体测试代码:
1 #ifndef __REGS_H 2 #define __REGS_H 3 4 #define gpa0base 0x11400000 5 #define GPA0CON (*(volatile unsigned long *)(gpa0base + 0x0000)) 6 7 #define uart0base 0x13800000 8 #define ULCON0 (*(volatile unsigned long *)(uart0base + 0x0000)) 9 #define UCON0 (*(volatile unsigned long *)(uart0base + 0x0004)) 10 #define UFCON0 (*(volatile unsigned long *)(uart0base + 0x0008)) 11 #define UMCON0 (*(volatile unsigned long *)(uart0base + 0x000C)) 12 #define UTRSTAT0 (*(volatile unsigned long *)(uart0base + 0x0010)) 13 #define UERSTAT0 (*(volatile unsigned long *)(uart0base + 0x0014)) 14 #define UFSTAT0 (*(volatile unsigned long *)(uart0base + 0x0018)) 15 #define UMSTAT0 (*(volatile unsigned long *)(uart0base + 0x001C)) 16 #define UTXH0 (*(volatile unsigned char *)(uart0base + 0x0020)) 17 #define URXH0 (*(volatile unsigned char *)(uart0base + 0x0024)) 18 #define UBRDIV0 (*(volatile unsigned long *)(uart0base + 0x0028)) 19 #define UFRACVAL0 (*(volatile unsigned long *)(uart0base + 0x002C)) 20 #define UINTP0 (*(volatile unsigned long *)(uart0base + 0x0030)) 21 #define UINTSP0 (*(volatile unsigned long *)(uart0base + 0x0034)) 22 #define UINTM0 (*(volatile unsigned long *)(uart0base + 0x0038)) 23 24 #define uart3base 0x13830000 25 #define ULCON3 (*(volatile unsigned long *)(uart3base + 0x0000)) 26 #define UCON3 (*(volatile unsigned long *)(uart3base + 0x0004)) 27 #define UFCON3 (*(volatile unsigned long *)(uart3base + 0x0008)) 28 #define UMCON3 (*(volatile unsigned long *)(uart3base + 0x000C)) 29 #define UTRSTAT3 (*(volatile unsigned long *)(uart3base + 0x0010)) 30 #define UERSTAT3 (*(volatile unsigned long *)(uart3base + 0x0014)) 31 #define UFSTAT3 (*(volatile unsigned long *)(uart3base + 0x0018)) 32 #define UMSTAT3 (*(volatile unsigned long *)(uart3base + 0x001C)) 33 #define UTXH3 (*(volatile unsigned char *)(uart3base + 0x0020)) 34 #define URXH3 (*(volatile unsigned char *)(uart3base + 0x0024)) 35 #define UBRDIV3 (*(volatile unsigned long *)(uart3base + 0x0028)) 36 #define UFRACVAL3 (*(volatile unsigned long *)(uart3base + 0x002C)) 37 #define UINTP3 (*(volatile unsigned long *)(uart3base + 0x0030)) 38 #define UINTSP3 (*(volatile unsigned long *)(uart3base + 0x0034)) 39 #define UINTM3 (*(volatile unsigned long *)(uart3base + 0x0038)) 40 41 #endif //__REGS_H
1 #ifndef __UART_H 2 #define __UART_H 3 4 void uart_init(); 5 void set_gpio(); 6 void show_serial(); 7 void myputc(unsigned char c); 8 unsigned char mygetc(void); 9 void myputs(unsigned char *str); 10 void mygets(unsigned char *str); 11 12 #endif //__UART_H
1 #include "regs.h" 2 #include "uart.h" 3 4 int main() 5 { 6 set_gpio(); 7 uart_init(); 8 show_serial(); 9 return 0; 10 } 11 12 void show_serial() 13 { 14 /*循环进行数据收发*/ 15 unsigned char cmd[512]; 16 while(1) { 17 myputs("[root@dream]#"); 18 mygets(cmd); 19 myputs(cmd); 20 myputs("\n"); 21 } 22 23 } 24 25 void myputc(unsigned char c) 26 { 27 while(!(UTRSTAT0 & (1 << 1)));//等待buffer为空,再发送字符 28 UTXH0 = c; 29 } 30 unsigned char mygetc(void) 31 { 32 unsigned char ch; 33 while(!(UTRSTAT0 & 1));//等待buffer不为空 34 ch = URXH0; 35 36 return ch; 37 } 38 39 void myputs(unsigned char *str) 40 { 41 while(*str) { 42 myputc(*str); 43 if(*str == ‘\n‘) 44 myputc(‘\r‘); 45 str++; 46 } 47 } 48 49 void mygets(unsigned char *str) 50 { 51 unsigned char ch; 52 while(1) { 53 ch = mygetc();//获取字符 54 myputc(ch); 55 if(ch == ‘\r‘) { 56 myputc(‘\n‘); 57 break; 58 } 59 *str = ch; 60 str++; 61 } 62 *str = 0; 63 } 64 65 void set_gpio() 66 { 67 /*0x2 = UART_0_RXD 68 *0x2 = UART_0_TXD*/ 69 GPA0CON &= ~0xff; 70 GPA0CON |= 0x22; 71 } 72 73 void uart_init() 74 { 75 /*step 1:数据格式控制*/ 76 ULCON0 = 3; /*8bit data 1bit stop no parity*/ 77 /*step 2: uart 开关*/ 78 UCON0 = 1 | (1 << 2); 79 /*step 3: set Baud-rate*/ 80 UBRDIV0 = 0x35; 81 UFRACVAL0 = 0x4; 82 /*step 4: 数据收发缓存*/ 83 //UTXH0 84 //URXH0 85 /*step 5:数据收发状态寄存器*/ 86 //UTRSTAT0 87 }
标签:
原文地址:http://www.cnblogs.com/wenqiang/p/4984756.html