标签:
程序的结构模块有:
1.Point类。

1 #ifndef _POINT_H_ 2 #define _POINT_H_ 3 4 5 class Point{ 6 public: 7 double x; 8 double y; 9 public: 10 Point(); 11 Point(double a,const double b); 12 ~Point(); 13 void updatePoint(double a,double b); 14 }; 15 16 17 #endif
1 #include"Point.h" 2 #include<iostream> 3 4 Point::Point() { 5 this->x = 0; 6 this->y = 0; 7 } 8 9 Point::Point(double a,double b){ 10 this->x=a; 11 this->y=b; 12 } 13 14 Point::~Point() { 15 // std::cout << "调用Point析构函数" << std::endl; 16 } 17 18 19 void Point::updatePoint(double a,double b){ 20 this->x=a; 21 this->y=b; 22 }
2.Frame类,主要定义了3中坐标系,并完成了任务坐标系、关节坐标系与世界坐标系之间的相互转化。
1 #include<iostream> 2 #include<vector> 3 #include"Robot.h" 4 5 using namespace std; 6 7 8 int main(){ 9 10 Robot myRobot; 11 Point p0(0,0),p1(45,50),p2(8,15),p3(15,8),p4(9,12),p5(10,6); 12 13 WorldFrame WF1; 14 WF1.updatezeropoint(p0); 15 16 17 TaskFrame TF1,TF2,TF3; 18 19 Point tf_location1(2,2),tf_location2(3,2),tf_location3(2,3); //这三个点坐标为任务坐标系与世界坐标系的偏移向量 20 21 TF1.updateTaskFrame(tf_location1,45); 22 TF1.updateTaskFrame(tf_location2,60); 23 TF1.updateTaskFrame(tf_location3,90); 24 25 26 JointFrame JF; 27 28 29 myRobot.initRobot(10,10,180,0,0,360,0,0); 30 31 myRobot.PTPMove(JF,p1); 32 myRobot.PTPMove(WF1,p2); 33 myRobot.PTPMove(TF1,p3); 34 myRobot.PTPMove(TF2,p4); 35 myRobot.PTPMove(TF3,p5); 36 37 return 0; 38 39 }
1 #ifndef _FRAME_H_ 2 #define _FRAME_H_ 3 4 5 #include<Eigen/Dense> 6 #include<cmath> 7 #include"Point.h" 8 using namespace Eigen; 9 10 #define PI 3.14 11 12 13 class WorldFrame{ 14 private: 15 Point zeropoint; 16 public: 17 //WorldFrame(); 18 //~WorldFrame(); 19 void updatezeropoint(Point Zero){ 20 this->zeropoint=Zero; 21 } 22 23 }; 24 25 26 27 class JointFrame{ 28 private: 29 Point angle_2; 30 public: 31 //JointFrame(); 32 //JointFrame(const Point& Zero){ 33 // this->angle_2=Zero; 34 //} 35 //~JointFrame(); 36 void updateangle_2(Point Zero){ 37 this->angle_2=Zero; 38 } 39 40 }; 41 42 43 44 class TaskFrame{ 45 private: 46 Point location_2; 47 double deflection_angle; 48 public: 49 // TaskFrame(); 50 /************ 51 TaskFrame(Point point, double angle){ 52 this->location_2=point; 53 this->deflection_angle=angle; 54 } 55 ******************/ 56 //~TaskFrame(){}; 57 void updateTaskFrame(Point point, double angle){ 58 this->location_2=point; 59 this->deflection_angle=angle; 60 } 61 Point TF_to_WF(Point tfpoint); //将工件坐标系的坐标转换到世界坐标系 62 }; 63 64 65 #endif
1 #include"Frame.h" 2 3 Point TaskFrame::TF_to_WF(Point tfpoint){ 4 Matrix2d Rot; 5 double angle=deflection_angle/180*PI; 6 Point wfpoint; 7 Rot<< cos(angle),sin(angle), 8 -sin(angle),cos(angle); 9 Vector2d v1(tfpoint.x,tfpoint.y),v2(location_2.x,location_2.y),v3; 10 v3=Rot*v1+v2; 11 12 wfpoint.updatePoint(v3(0),v3(1)); 13 return wfpoint; 14 }
3.Slover类,完成实现机器人的正逆运动学变换,正运动学为把机器人的关节坐标变换成笛卡尔坐标(已完成,完成效果理想),逆运动学为把机器人的笛卡尔坐标变换成关节坐标(采用了几何法,运用余弦定理进行求解,算法还应该考虑象限的问题)。
1 #ifndef _SLOVER_H_ 2 #define _SLOVER_H_ 3 4 5 #include<math.h> 6 #include"Point.h" 7 8 #define PI 3.14 9 10 class Slover{ 11 private: 12 Point pi; 13 public: 14 Point forwordtrans(double L1,double L2,Point angle_2); 15 Point inversetrans(double L1,double L2,Point location_2); 16 }; 17 18 19 20 #endif
1 #include"Slover.h" 2 #include<cmath> 3 #define PI 3.14 4 5 Point Slover::forwordtrans(double L1,double L2,Point angle_2){ 6 this->pi=angle_2; 7 Point location_2; 8 double xi,yi; 9 xi=L1 *sin(pi.x/180*PI)+L2 *sin(pi.y/180*PI); 10 yi=L1 *cos(pi.x/180*PI)+L2 *cos(pi.y/180*PI); 11 location_2.updatePoint(xi,yi); 12 return location_2; 13 } 14 15 Point Slover::inversetrans(double l1,double l2,Point location_2){ 16 this->pi=location_2; 17 Point angle_2; 18 double xi,yi; 19 //****机器人逆向求解算法,利用几何法求解,将坐标点与原点连接,与机械臂1、2构成三角形,用余弦定理求解*********// 20 double x=location_2.x, y=location_2.y; 21 double l3=sqrt(x*x+y*y); 22 yi=(acos((l1*l1+l2*l2-l3*l3)/(2*l1*l2)))/PI*180; 23 xi=(atan(y/x)+acos((l1*l1+l3*l3-l2*l2)/(2*l1*l3)))/PI*180; 24 //********************************************************************************************************// 25 angle_2.updatePoint(xi,yi); 26 return angle_2; 27 }
4.机器人类
1 #ifndef _ROBOT_H_ 2 #define _ROBOT_H_ 3 4 5 #include"Slover.h" 6 #include"Frame.h" 7 8 class Robot{ 9 public: 10 double leglth1,leglth2; 11 double ja1max,ja1zero,ja1min; 12 double ja2max,ja2zero,ja2min; 13 private: 14 double JointAngle1,JointAngle2; 15 WorldFrame WF0; 16 JointFrame JF0; 17 TaskFrame TF0; 18 Point Poi0; 19 public: 20 //Robot(); 21 /************************** 22 Robot(const double& ll1,const double& ll2, 23 const double& Ja1max,const double& Ja1zero,const double& Ja1min, 24 const double& Ja2max,const double& Ja2zero,const double& Ja2min){ 25 leglth1=ll1; leglth2=ll2; 26 ja1max=Ja1max; ja1zero=Ja1zero; ja1min=Ja1min; 27 ja2max=Ja2max; ja2zero=Ja2zero; ja2min=Ja2min; 28 }; 29 ***********************/ 30 initRobot( double ll1,double ll2, 31 double Ja1max,double Ja1zero,double Ja1min, 32 double Ja2max,double Ja2zero,double Ja2min){ 33 leglth1=ll1; leglth2=ll2; 34 ja1max=Ja1max; ja1zero=Ja1zero; ja1min=Ja1min; 35 ja2max=Ja2max; ja2zero=Ja2zero; ja2min=Ja2min; 36 } 37 void PTPMove( WorldFrame wf,Point point); 38 void PTPMove(JointFrame jf,Point point); 39 void PTPMove(TaskFrame tf,Point point); 40 }; 41 42 43 44 #endif
1 #include<iostream> 2 #include"Robot.h" 3 4 void Robot::PTPMove( WorldFrame wf,Point point){ 5 this->WF0=wf; 6 this->Poi0=point; 7 Slover sl; 8 Point angle_2; 9 angle_2=sl.inversetrans(this->leglth1,this->leglth2,Poi0); 10 std::cout<<"完成世界坐标系下的该任务,机器人的两个关节角度是:"<<"["<<angle_2.x<<","<<angle_2.y<<"]"<<std::endl; 11 } 12 13 void Robot::PTPMove(JointFrame jf,Point point){ 14 this->Poi0=point; 15 std::cout<<"完成关节坐标系下的该任务,机器人的两个关节角度是:"<<"["<<point.x<<","<<point.y<<"]"<<";"; 16 Slover sl; 17 Point location_2; 18 location_2=sl.forwordtrans(this->leglth1,this->leglth2,Poi0); 19 std::cout<<"此时机器人末端世界坐标为:"<<"["<<location_2.x<<","<<location_2.y<<"]"<<std::endl; 20 } 21 22 void Robot::PTPMove(TaskFrame tf,Point point){ 23 this->TF0=tf; 24 this->Poi0=point; 25 Point WFpoint; 26 WFpoint=TF0.TF_to_WF(Poi0); 27 std::cout<<"该任务坐标系下的点,在世界坐标系的坐标为:"<<"["<<WFpoint.x<<","<<WFpoint.y<<"]"<<";"; 28 Slover sl; 29 Point angle_2; 30 angle_2=sl.inversetrans(this->leglth1,this->leglth2,point); 31 std::cout<<"完成该任务,机器人的两个关节角度是:"<<"["<<angle_2.x<<","<<angle_2.y<<"]"<<std::endl; 32 } 33 34
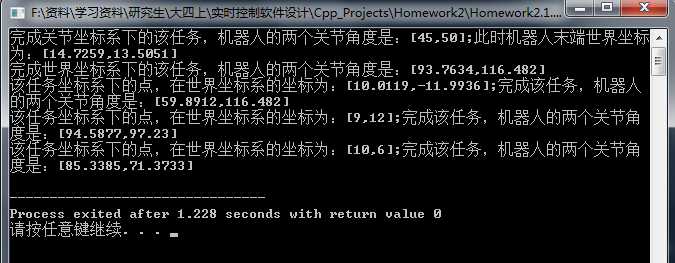
5.主程序:主程序新建了一个机器人对象,并对机器人机械参数进行了赋值,同时定义了几个任务坐标系、世界坐标系和工件坐标系,调用Robot类的PTPMove函数,进行了程序验证。
1 #include<iostream> 2 #include<vector> 3 #include"Robot.h" 4 5 using namespace std; 6 7 8 int main(){ 9 10 Robot myRobot; 11 Point p0(0,0),p1(45,50),p2(8,15),p3(15,8),p4(9,12),p5(10,6); 12 13 WorldFrame WF1; 14 WF1.updatezeropoint(p0); 15 16 17 TaskFrame TF1,TF2,TF3; 18 19 Point tf_location1(2,2),tf_location2(3,2),tf_location3(2,3); //这三个点坐标为任务坐标系与世界坐标系的偏移向量 20 21 TF1.updateTaskFrame(tf_location1,45); 22 TF1.updateTaskFrame(tf_location2,60); 23 TF1.updateTaskFrame(tf_location3,90); 24 25 26 JointFrame JF; 27 28 29 myRobot.initRobot(10,10,180,0,0,360,0,0); 30 31 myRobot.PTPMove(JF,p1); 32 myRobot.PTPMove(WF1,p2); 33 myRobot.PTPMove(TF1,p3); 34 myRobot.PTPMove(TF2,p4); 35 myRobot.PTPMove(TF3,p5); 36 37 return 0; 38 39 }
最总得到的结果为:

标签:
原文地址:http://www.cnblogs.com/chaoh/p/5034331.html
