标签:
在给大家介绍ZooKeeper之前先来给大家介绍一种技术——分布式协调技术。那么什么是分布式协调技术?那么我来告诉大家,其实分布式协调技术主要用来解决分布式环境当中多个进程之间的同步控制,让他们有序的去访问某种临界资源,防止造成"脏数据"的后果。这时,有人可能会说这个简单,写一个调度算法就轻松解决了。说这句话的人,可能对分布式系统不是很了解,所以才会出现这种误解。如果这些进程全部是跑在一台机上的话,相对来说确实就好办了,问题就在于他是在一个分布式的环境下,这时问题又来了,那什么是分布式呢?这个一两句话我也说不清楚,但我给大家画了一张图希望能帮助大家理解这方面的内容,如果觉得不对尽可拍砖,来咱们看一下这张图,如图1.1所示。
图 1.1 分布式系统图
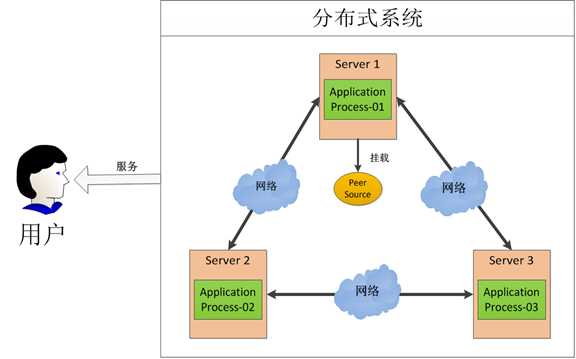
给大家分析一下这张图,在这图中有三台机器,每台机器各跑一个应用程序。然后我们将这三台机器通过网络将其连接起来,构成一个系统来为用户提供服务,对用户来说这个系统的架构是透明的,他感觉不到我这个系统是一个什么样的架构。那么我们就可以把这种系统称作一个分布式系统。
那我们接下来再分析一下,在这个分布式系统中如何对进程进行调度,我假设在第一台机器上挂载了一个资源,然后这三个物理分布的进程都要竞争这个资源,但我们又不希望他们同时进行访问,这时候我们就需要一个协调器,来让他们有序的来访问这个资源。这个协调器就是我们经常提到的那个锁,比如说"进程-1"在使用该资源的时候,会先去获得锁,"进程1"获得锁以后会对该资源保持独占,这样其他进程就无法访问该资源,"进程1"用完该资源以后就将锁释放掉,让其他进程来获得锁,那么通过这个锁机制,我们就能保证了分布式系统中多个进程能够有序的访问该临界资源。那么我们把这个分布式环境下的这个锁叫作分布式锁。这个分布式锁也就是我们分布式协调技术实现的核心内容,那么如何实现这个分布式呢,那就是我们后面要讲的内容。
好我们知道,为了防止分布式系统中的多个进程之间相互干扰,我们需要一种分布式协调技术来对这些进程进行调度。而这个分布式协调技术的核心就是来实现这个分布式锁。那么这个锁怎么实现呢?这实现起来确实相对来说比较困难的。
在看了图1.1所示的分布式环境之后,有人可能会感觉这不是很难。无非是将原来在同一台机器上对进程调度的原语,通过网络实现在分布式环境中。是的,表面上是可以这么说。但是问题就在网络这,在分布式系统中,所有在同一台机器上的假设都不存在:因为网络是不可靠的。
比如,在同一台机器上,你对一个服务的调用如果成功,那就是成功,如果调用失败,比如抛出异常那就是调用失败。但是在分布式环境中,由于网络的不可靠,你对一个服务的调用失败了并不表示一定是失败的,可能是执行成功了,但是响应返回的时候失败了。还有,A和B都去调用C服务,在时间上 A还先调用一些,B后调用,那么最后的结果是不是一定A的请求就先于B到达呢? 这些在同一台机器上的种种假设,我们都要重新思考,我们还要思考这些问题给我们的设计和编码带来了哪些影响。还有,在分布式环境中为了提升可靠性,我们往往会部署多套服务,但是如何在多套服务中达到一致性,这在同一台机器上多个进程之间的同步相对来说比较容易办到,但在分布式环境中确实一个大难题。
所以分布式协调远比在同一台机器上对多个进程的调度要难得多,而且如果为每一个分布式应用都开发一个独立的协调程序。一方面,协调程序的反复编写浪费,且难以形成通用、伸缩性好的协调器。另一方面,协调程序开销比较大,会影响系统原有的性能。所以,急需一种高可靠、高可用的通用协调机制来用以协调分布式应用。
目前,在分布式协调技术方面做得比较好的就是Google的Chubby还有Apache的ZooKeeper他们都是分布式锁的实现者。有人会问既然有了Chubby为什么还要弄一个ZooKeeper,难道Chubby做得不够好吗?不是这样的,主要是Chbby是非开源的,Google自家用。后来雅虎模仿Chubby开发出了ZooKeeper,也实现了类似的分布式锁的功能,并且将ZooKeeper作为一种开源的程序捐献给了Apache,那么这样就可以使用ZooKeeper所提供锁服务。而且在分布式领域久经考验,它的可靠性,可用性都是经过理论和实践的验证的。所以我们在构建一些分布式系统的时候,就可以以这类系统为起点来构建我们的系统,这将节省不少成本,而且bug也 将更少。


ZooKeeper是一种为分布式应用所设计的高可用、高性能且一致的开源协调服务,它提供了一项基本服务:分布式锁服务。由于ZooKeeper的开源特性,后来我们的开发者在分布式锁的基础上,摸索了出了其他的使用方法:配置维护、组服务、分布式消息队列、分布式通知/协调等。
前面提到了那么多的服务,比如分布式锁、配置维护、组服务等,那它们是如何实现的呢,我相信这才是大家关心的东西。ZooKeeper在实现这些服务时,首先它设计一种新的数据结构——Znode,然后在该数据结构的基础上定义了一些原语,也就是一些关于该数据结构的一些操作。有了这些数据结构和原语还不够,因为我们的ZooKeeper是工作在一个分布式的环境下,我们的服务是通过消息以网络的形式发送给我们的分布式应用程序,所以还需要一个通知机制——Watcher机制。那么总结一下,ZooKeeper所提供的服务主要是通过:数据结构+原语+watcher机制,三个部分来实现的。那么我就从这三个方面,给大家介绍一下ZooKeeper。
ZooKeeper拥有一个层次的命名空间,这个和标准的文件系统非常相似,如下图3.1 所示。
图4.1 ZooKeeper数据模型与文件系统目录树
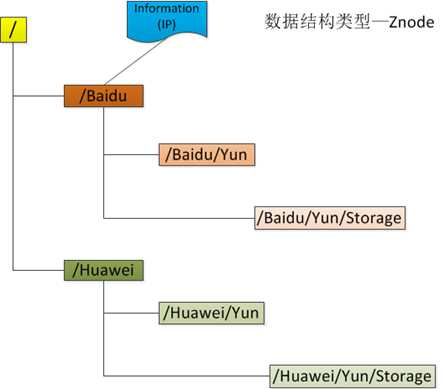
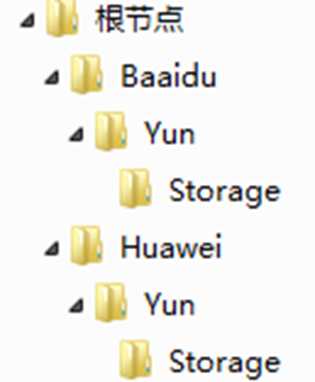
从图中我们可以看出ZooKeeper的数据模型,在结构上和标准文件系统的非常相似,都是采用这种树形层次结构,ZooKeeper树中的每个节点被称为—Znode。和文件系统的目录树一样,ZooKeeper树中的每个节点可以拥有子节点。但也有不同之处:
(1) 引用方式
Zonde通过路径引用,如同Unix中的文件路径。路径必须是绝对的,因此他们必须由斜杠字符来开头。除此以外,他们必须是唯一的,也就是说每一个路径只有一个表示,因此这些路径不能改变。在ZooKeeper中,路径由Unicode字符串组成,并且有一些限制。字符串"/zookeeper"用以保存管理信息,比如关键配额信息。
(2) Znode结构
ZooKeeper命名空间中的Znode,兼具文件和目录两种特点。既像文件一样维护着数据、元信息、ACL、时间戳等数据结构,又像目录一样可以作为路径标识的一部分。图中的每个节点称为一个Znode。 每个Znode由3部分组成:
① stat:此为状态信息, 描述该Znode的版本, 权限等信息
② data:与该Znode关联的数据
③ children:该Znode下的子节点
ZooKeeper虽然可以关联一些数据,但并没有被设计为常规的数据库或者大数据存储,相反的是,它用来管理调度数据,比如分布式应用中的配置文件信息、状态信息、汇集位置等等。这些数据的共同特性就是它们都是很小的数据,通常以KB为大小单位。ZooKeeper的服务器和客户端都被设计为严格检查并限制每个Znode的数据大小至多1M,但常规使用中应该远小于此值。
(3) 数据访问
ZooKeeper中的每个节点存储的数据要被原子性的操作。也就是说读操作将获取与节点相关的所有数据,写操作也将替换掉节点的所有数据。另外,每一个节点都拥有自己的ACL(访问控制列表),这个列表规定了用户的权限,即限定了特定用户对目标节点可以执行的操作。
(4) 节点类型
ZooKeeper中的节点有两种,分别为临时节点和永久节点。节点的类型在创建时即被确定,并且不能改变。
① 临时节点:该节点的生命周期依赖于创建它们的会话。一旦会话(Session)结束,临时节点将被自动删除,当然可以也可以手动删除。虽然每个临时的Znode都会绑定到一个客户端会话,但他们对所有的客户端还是可见的。另外,ZooKeeper的临时节点不允许拥有子节点。
② 永久节点:该节点的生命周期不依赖于会话,并且只有在客户端显示执行删除操作的时候,他们才能被删除。
(5) 顺序节点
当创建Znode的时候,用户可以请求在ZooKeeper的路径结尾添加一个递增的计数。这个计数对于此节点的父节点来说是唯一的,它的格式为"%10d"(10位数字,没有数值的数位用0补充,例如"0000000001")。当计数值大于232-1时,计数器将溢出。
(6) 观察
客户端可以在节点上设置watch,我们称之为监视器。当节点状态发生改变时(Znode的增、删、改)将会触发watch所对应的操作。当watch被触发时,ZooKeeper将会向客户端发送且仅发送一条通知,因为watch只能被触发一次,这样可以减少网络流量。
ZooKeeper有多种记录时间的形式,其中包含以下几个主要属性:
(1) Zxid
致使ZooKeeper节点状态改变的每一个操作都将使节点接收到一个Zxid格式的时间戳,并且这个时间戳全局有序。也就是说,也就是说,每个对节点的改变都将产生一个唯一的Zxid。如果Zxid1的值小于Zxid2的值,那么Zxid1所对应的事件发生在Zxid2所对应的事件之前。实际上,ZooKeeper的每个节点维护者三个Zxid值,为别为:cZxid、mZxid、pZxid。
① cZxid: 是节点的创建时间所对应的Zxid格式时间戳。
② mZxid:是节点的修改时间所对应的Zxid格式时间戳。
实现中Zxid是一个64为的数字,它高32位是epoch用来标识leader关系是否改变,每次一个leader被选出来,它都会有一个 新的epoch。低32位是个递增计数。 (2) 版本号
对节点的每一个操作都将致使这个节点的版本号增加。每个节点维护着三个版本号,他们分别为:
① version:节点数据版本号
② cversion:子节点版本号
③ aversion:节点所拥有的ACL版本号
通过前面的介绍,我们可以了解到,一个节点自身拥有表示其状态的许多重要属性,如下图所示。
图 4.2 Znode节点属性结构

在ZooKeeper中有9个基本操作,如下图所示:
图 5.1 ZooKeeper类方法描述
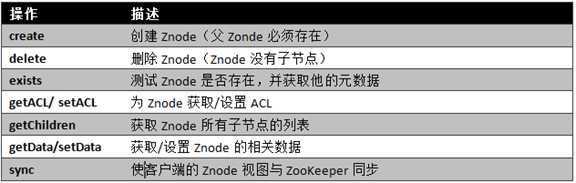
更新ZooKeeper操作是有限制的。delete或setData必须明确要更新的Znode的版本号,我们可以调用exists找到。如果版本号不匹配,更新将会失败。
更新ZooKeeper操作是非阻塞式的。因此客户端如果失去了一个更新(由于另一个进程在同时更新这个Znode),他可以在不阻塞其他进程执行的情况下,选择重新尝试或进行其他操作。
尽管ZooKeeper可以被看做是一个文件系统,但是处于便利,摒弃了一些文件系统地操作原语。因为文件非常的小并且使整体读写的,所以不需要打开、关闭或是寻地的操作。
(1) watch概述
ZooKeeper可以为所有的读操作设置watch,这些读操作包括:exists()、getChildren()及getData()。watch事件是一次性的触发器,当watch的对象状态发生改变时,将会触发此对象上watch所对应的事件。watch事件将被异步地发送给客户端,并且ZooKeeper为watch机制提供了有序的一致性保证。理论上,客户端接收watch事件的时间要快于其看到watch对象状态变化的时间。
(2) watch类型
ZooKeeper所管理的watch可以分为两类:
① 数据watch(data watches):getData和exists负责设置数据watch
② 孩子watch(child watches):getChildren负责设置孩子watch
我们可以通过操作返回的数据来设置不同的watch:
① getData和exists:返回关于节点的数据信息
② getChildren:返回孩子列表
因此
① 一个成功的setData操作将触发Znode的数据watch
② 一个成功的create操作将触发Znode的数据watch以及孩子watch
③ 一个成功的delete操作将触发Znode的数据watch以及孩子watch
(3) watch注册与处触发
图 6.1 watch设置操作及相应的触发器如图下图所示:

① exists操作上的watch,在被监视的Znode创建、删除或数据更新时被触发。
② getData操作上的watch,在被监视的Znode删除或数据更新时被触发。在被创建时不能被触发,因为只有Znode一定存在,getData操作才会成功。
③ getChildren操作上的watch,在被监视的Znode的子节点创建或删除,或是这个Znode自身被删除时被触发。可以通过查看watch事件类型来区分是Znode,还是他的子节点被删除:NodeDelete表示Znode被删除,NodeDeletedChanged表示子节点被删除。
Watch由客户端所连接的ZooKeeper服务器在本地维护,因此watch可以非常容易地设置、管理和分派。当客户端连接到一个新的服务器时,任何的会话事件都将可能触发watch。另外,当从服务器断开连接的时候,watch将不会被接收。但是,当一个客户端重新建立连接的时候,任何先前注册过的watch都会被重新注册。
(4) 需要注意的几点
Zookeeper的watch实际上要处理两类事件:
① 连接状态事件(type=None, path=null)
这类事件不需要注册,也不需要我们连续触发,我们只要处理就行了。
② 节点事件
节点的建立,删除,数据的修改。它是one time trigger,我们需要不停的注册触发,还可能发生事件丢失的情况。
上面2类事件都在Watch中处理,也就是重载的process(Event event)
节点事件的触发,通过函数exists,getData或getChildren来处理这类函数,有双重作用:
① 注册触发事件
② 函数本身的功能
函数的本身的功能又可以用异步的回调函数来实现,重载processResult()过程中处理函数本身的的功能。
为了方便大家理解ZooKeeper,在此就给大家举个例子,看看ZooKeeper是如何实现的他的服务的,我以ZooKeeper提供的基本服务分布式锁为例。
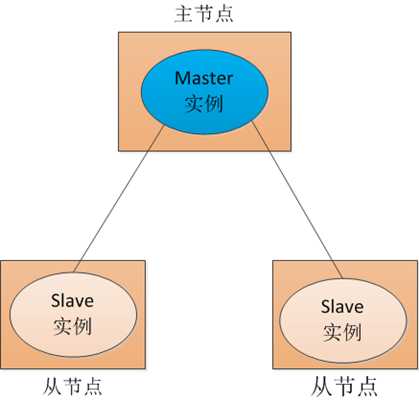
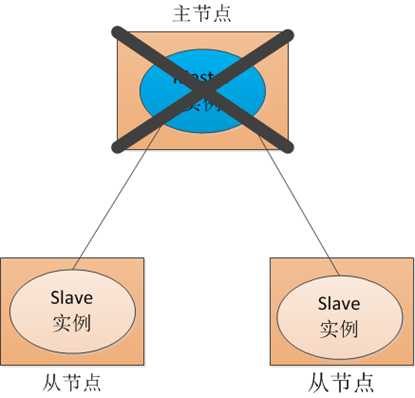
在分布式锁服务中,有一种最典型应用场景,就是通过对集群进行Master选举,来解决分布式系统中的单点故障。什么是分布式系统中的单点故障:通常分布式系统采用主从模式,就是一个主控机连接多个处理节点。主节点负责分发任务,从节点负责处理任务,当我们的主节点发生故障时,那么整个系统就都瘫痪了,那么我们把这种故障叫作单点故障。如下图7.1和7.2所示:
图 7.1 主从模式分布式系统 图7.2 单点故障
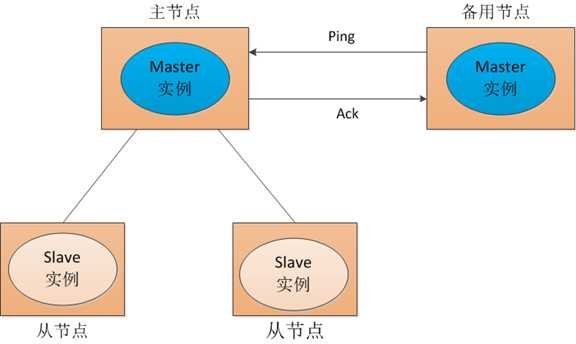
传统方式是采用一个备用节点,这个备用节点定期给当前主节点发送ping包,主节点收到ping包以后向备用节点发送回复Ack,当备用节点收到回复的时候就会认为当前主节点还活着,让他继续提供服务。如图7.3所示:
图 7.3 传统解决方案
当主节点挂了,这时候备用节点收不到回复了,然后他就认为主节点挂了接替他成为主节点如下图7.4所示:
图 7.4传统解决方案
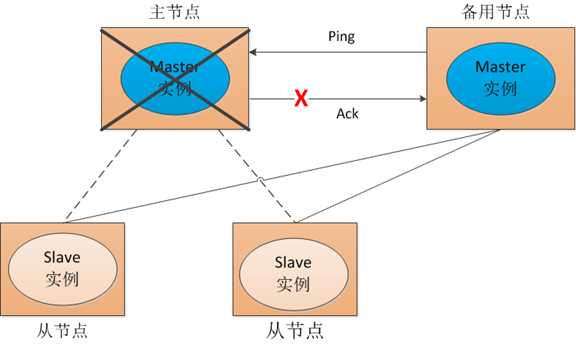
但是这种方式就是有一个隐患,就是网络问题,来看一网络问题会造成什么后果,如下图7.5所示:
图 7.5 网络故障
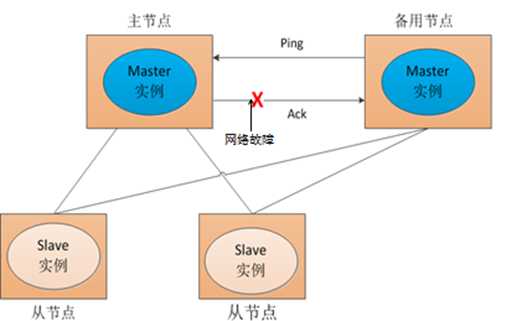
也就是说我们的主节点的并没有挂,只是在回复的时候网络发生故障,这样我们的备用节点同样收不到回复,就会认为主节点挂了,然后备用节点将他的Master实例启动起来,这样我们的分布式系统当中就有了两个主节点也就是---双Master,出现Master以后我们的从节点就会将它所做的事一部分汇报给了主节点,一部分汇报给了从节点,这样服务就全乱了。为了防止出现这种情况,我们引入了ZooKeeper,它虽然不能避免网络故障,但它能够保证每时每刻只有一个Master。我么来看一下ZooKeeper是如何实现的。
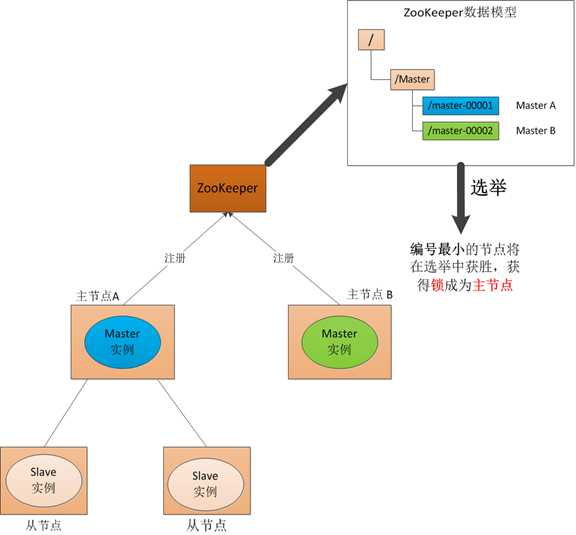
(1) Master启动
在引入了Zookeeper以后我们启动了两个主节点,"主节点-A"和"主节点-B"他们启动以后,都向ZooKeeper去注册一个节点。我们假设"主节点-A"锁注册地节点是"master-00001","主节点-B"注册的节点是"master-00002",注册完以后进行选举,编号最小的节点将在选举中获胜获得锁成为主节点,也就是我们的"主节点-A"将会获得锁成为主节点,然后"主节点-B"将被阻塞成为一个备用节点。那么,通过这种方式就完成了对两个Master进程的调度。
图7.6 ZooKeeper Master选举
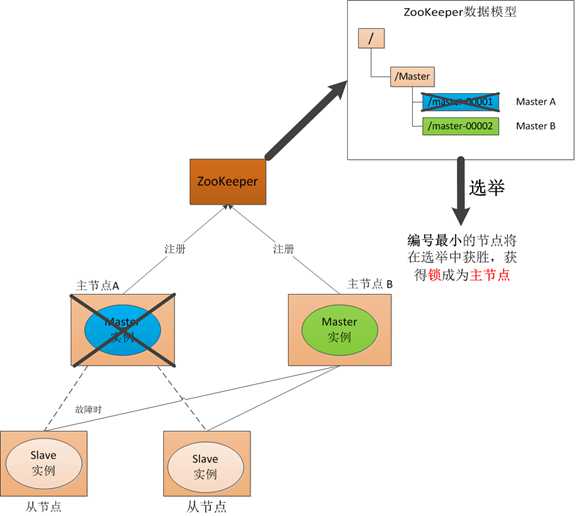
(2) Master故障
如果"主节点-A"挂了,这时候他所注册的节点将被自动删除,ZooKeeper会自动感知节点的变化,然后再次发出选举,这时候"主节点-B"将在选举中获胜,替代"主节点-A"成为主节点。
图7.7 ZooKeeper Master选举
(3) Master 恢复
图7.8 ZooKeeper Master选举
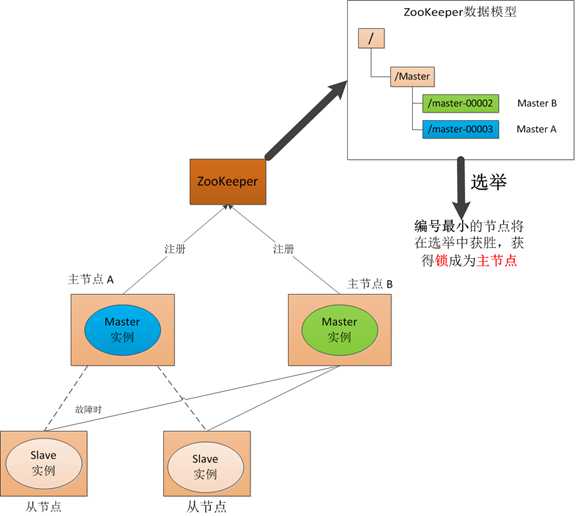
如果主节点恢复了,他会再次向ZooKeeper注册一个节点,这时候他注册的节点将会是"master-00003",ZooKeeper会感知节点的变化再次发动选举,这时候"主节点-B"在选举中会再次获胜继续担任"主节点","主节点-A"会担任备用节点。
标签:
原文地址:http://www.cnblogs.com/thinkpad/p/5041493.html