标签:des blog http color os strong
// Apply Canny algorithm cv::Mat contours; cv::Canny(image, // gray-level image contours, // output contours 125, // low threshold 350); // high threshold
When applied on the following image: The result is as follows:

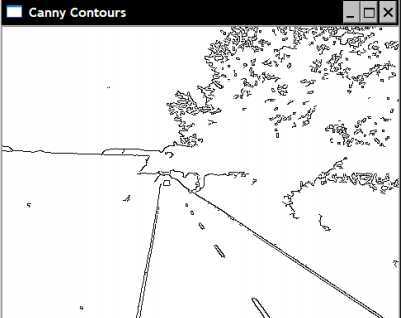
cv::Mat contoursInv; // inverted image cv::threshold(contours,contoursInv, 128, // values below this 255, // becomes this cv::THRESH_BINARY_INV);
.png)
cv::Mat image = cv:: imread("../road.jpg" , 0 );
if (! image.data ) {
return 0 ;
}
cv ::namedWindow( "Original Image" );
cv ::imshow( "Original Image" , image);
// Apply Canny algorithm
cv ::Mat contours;
cv ::Canny( image, contours , 125 , 350 );
cv ::namedWindow( "Canny edges" );
cv ::imshow( "Canny edges" , contours);
cv ::Mat result( contours.rows ,contours. cols,CV_8U ,cv:: Scalar(255 ));
image .copyTo( result);
// Hough transform for line detection
std ::vector< cv::Vec2f > lines;
cv ::HoughLines( contours, lines ,
1, PI / 180 , // step size
80); // minimum number of votes
std ::vector< cv::Vec2f >::const_iterator it = lines.begin ();
while ( it != lines .end()) {
float rho = (*it )[0]; // first element is distance rho
float theta = (*it )[1]; // second element is angle theta
if ( theta < PI /4. || theta > 3.* PI/4. ) { // ~vertical line
// point of intersection of the line with first row
cv ::Point pt1( rho / cos (theta), 0);
// point of intersection of the line with last row
cv ::Point pt2(( rho - result .rows * sin(theta )) / cos(theta ), result. rows);
// draw a while line
cv ::line( result, pt1 , pt2, cv::Scalar (255), 1);
} else { //~horizontal line
// point of intersection of the line with first column
cv ::Point pt1( 0, rho / sin( theta));
// point of intersection of the line with last column
cv ::Point pt2( result.cols , ( rho - result .cols * cos(theta )) / sin(theta ));
// draw a white line
cv ::line( result, pt1 , pt2, cv::Scalar (255), 1);
}
++it;
}
cv ::namedWindow( "Detected lines with hough" );
cv ::imshow( "Detected lines with hough" , result);
gets the following results:



#if ! defined LINE_FINDER
#define LINE_FINDER
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <vector>
#define PI 3.1415926
class LineFinder {
private:
// original image
cv ::Mat img;
// vector containing the end points
// of the detected lines
std ::vector< cv::Vec4i > lines;
// accumulator resolution parameters
double deltaRho;
double deltaTheta;
// minimum number of votes that a line
// must receive before being considered
int minVote;
// min length of a line
double minLength;
// max allowed gap along the line
double maxGap;
public:
// Default accumulator resolution is 1 pixel by 1 degree
// no gap, no minimum length
LineFinder () : deltaRho(1 ), deltaTheta( PI / 180),
minVote (10), minLength(0. ), maxGap( 0.) {}
// Set the resolution of the accumulator
void setAccResolution( double dRho, double dTheta ) {
deltaRho = dRho;
deltaTheta = dTheta;
}
// Set the minimum number of votes
void setMinVote( int minV) {
minVote = minV;
}
// Set line length and gap
void setLineLengthAndGap( double length, double gap ) {
minLength = length;
maxGap = gap;
}
// Apply probabilistic Hough Transform
std ::vector< cv::Vec4i > findLines( cv::Mat &binary) {
lines .clear();
cv ::HoughLinesP( binary, lines ,
deltaRho , deltaTheta, minVote, minLength , maxGap);
return lines;
}
// Draw the detected lines on image
void drawDetectedLines( cv::Mat &image,
cv ::Scalar color = cv::Scalar (255, 255, 255)) {
// Draw the lines
std ::vector< cv::Vec4i >::const_iterator it2 = lines.begin ();
while ( it2 != lines .end()){
cv ::Point pt1((* it2)[0 ], (* it2)[1 ]);
cv ::Point pt2((* it2)[2 ], (* it2)[3 ]);
cv ::line( image, pt1 , pt2, color);
++ it2;
}
}
};
#endif
main.cpp:
// Create LineFinder instance
LineFinder finder ;
// Set probabilistic Hough parameters
finder .setLineLengthAndGap( 100, 20);
finder .setMinVote( 80);
// Detect lines and draw them
std ::vector< cv::Vec4i > linesP = finder.findLines (contours);
finder .drawDetectedLines( image);
cv ::namedWindow( "Detected Lines with HoughP" );
cv ::imshow( "Detected Lines with HoughP" , image);
result:

image = cv ::imread( "../chariot.jpg" , 0 );
cv ::GaussianBlur( image, image , cv:: Size(5 , 5 ), 1.5 );
std ::vector< cv::Vec3f > circles;
cv ::HoughCircles( image, circles , CV_HOUGH_GRADIENT,
2, // accumulator resolution (size of the image / 2)
50, // minimum distance between two circles
200, // Canny high threshold
100, // minimum number of votes
25, 100); // min and max radius
std ::vector< cv::Vec3f >::const_iterator itc = circles.begin ();
while ( itc != circles .end()) {
cv ::circle( image,
cv ::Point((* itc)[0 ], (* itc)[1 ]), // circle centre
(*itc)[ 2], // circle radius
cv ::Scalar( 255), // color
2 // thickness
);
++ itc;
}
cv ::namedWindow( "Detected Circles" );
cv ::imshow( "Detected Circles" , image);
result:

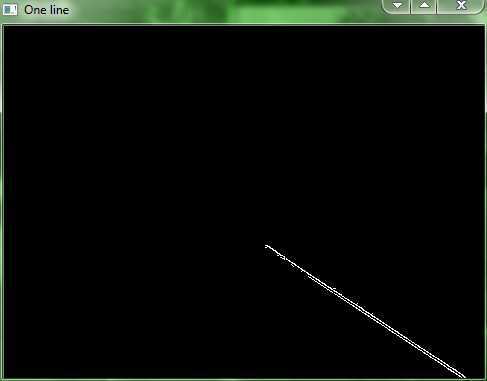
// Fitting a line to a set of points
int n = 0; // we select line 0
// black image
cv ::Mat oneline( contours.size (), CV_8U, cv::Scalar (0));
// white line
cv ::line( oneline,
cv ::Point( linesP[n ][0], linesP[n ][1]),
cv ::Point( linesP[n ][2], linesP[n ][3]),
cv ::Scalar( 255),
5);
// contours And white line
cv ::bitwise_and( contours, oneline , oneline);
cv ::namedWindow( "One line" );
cv ::imshow( "One line" , oneline);
std::vector <cv:: Point> points ;
// Iterate over the pixels to obtain all point positions
for ( int y = 0; y < oneline .rows; y++) {
// row y
uchar *rowPtr = oneline.ptr <uchar>( y);
for ( int x = 0; x < oneline .cols; x++) {
// column x
// if on a contour
if ( rowPtr[x ]) {
points .push_back( cv::Point (x, y));
}
}
}
cv ::Vec4f line;
cv ::fitLine( cv::Mat (points), line,
CV_DIST_L2 , // distance type
0, // not used with L2 distance
0.01, 0.01 // accuracy
);
int x0 = line[2 ]; // a point on the line
int y0 = line[3 ];
int x1 = x0 - 200 * line[0 ]; // add a vector of length 200
int y1 = y0 - 200 * line[1 ]; // using the unit vector
image = cv:: imread("../road.jpg" , 0 );
cv ::line( image, cv ::Point( x0, y0 ), cv:: Point(x1 , y1), cv::Scalar (0), 3);
cv ::namedWindow( "Estimated line" );
cv ::imshow( "Estimated line" , image);

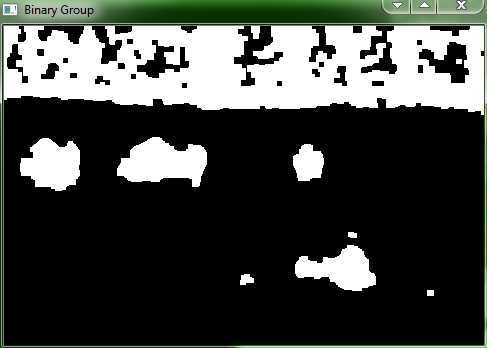
cv::Mat image = cv:: imread("../binaryGroup.bmp" , 0 );
if (! image.data ) {
return 0 ;
}
cv ::namedWindow( "Binary Group" );
cv ::imshow( "Binary Group" , image);
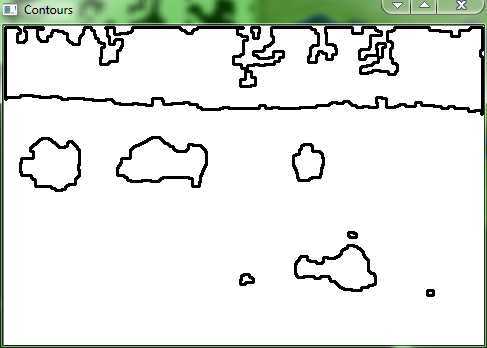
std ::vector< std::vector <cv:: Point>> contours ;
cv ::findContours( image,
contours , // a vector of contours
CV_RETR_EXTERNAL , // retrieve the external contours
CV_CHAIN_APPROX_NONE // all pixels of each contours
);
// Draw black contours on a white image
cv ::Mat result( image.size (), CV_8U, cv::Scalar (255));
cv ::drawContours( result, contours ,
-1, // draw all contours
cv ::Scalar( 0), // in black
2 // with a thickness of 2
);
cv ::namedWindow( "Contours" );
cv ::imshow( "Contours" , result);
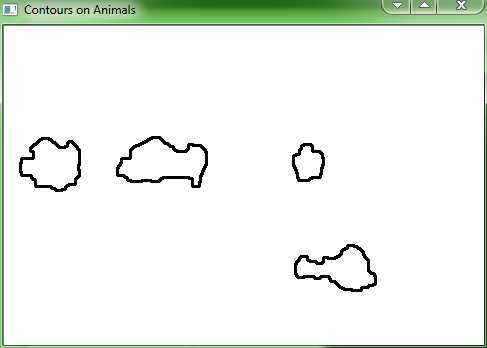
//Eliminate too short or too long contours
int cmin = 100; // minimum contour length
int cmax = 1000; //maximum contour length
std ::vector< std::vector <cv:: Point>>::const_iterator itc = contours. begin();
while ( itc != contours .end()) {
if ( itc->size () < cmin || itc ->size() > cmax ) {
itc = contours. erase(itc );
}
else
++itc;
}
// draw contours on the original image
cv ::Mat original = cv::imread ("../group.jpg");
cv ::drawContours( original, contours , - 1, cv ::Scalar( 255), 2);
cv ::namedWindow( "Contours on Animals" );
cv ::imshow( "Contours on Animals" , original);

// draw contours on the white image
result .setTo( cv::Scalar (255));
cv ::drawContours( result, contours ,
-1, // draw all contours
cv ::Scalar( 0), // in black
2 // with a thickness of 2
);
cv ::namedWindow( "Contours on Animals" );
cv ::imshow( "Contours on Animals" , result);
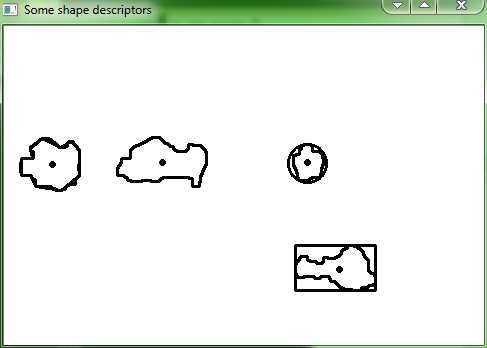
// Computing components‘ shape descriptor---------------------------
// testing the bounding box
cv ::Rect r0 = cv::boundingRect (cv:: Mat(contours [0]));
cv ::rectangle( result, r0 , cv:: Scalar(0 ), 2 );
// testing the enclosing circle
float radius;
cv ::Point2f center;
cv ::minEnclosingCircle( cv::Mat (contours[ 1]), center , radius);
cv ::circle( result, cv ::Point( center), static_cast<int >(radius), cv::Scalar (0), 2);
// testing the approximate polygon
std ::vector< cv::Point > poly;
cv ::approxPolyDP( cv::Mat (contours[ 2]), poly , 5 , true );
// Iterate over each segment and draw it
std ::vector< cv::Point >::const_iterator itp = poly.begin ();
while ( itp != (poly. end() - 1 )) {
cv ::line( result, *itp, *(itp + 1 ), cv:: Scalar(0 ), 2 );
++ itp;
}
// last point linked to first point
cv ::line( result, *(poly. begin()), *(poly. end() - 1 ), cv:: Scalar(20 ), 2 );
// testing the convex hull
std ::vector< cv::Point > hull;
cv ::convexHull( cv::Mat (contours[ 3]), hull );
// testing the moments iterate over all contours
itc = contours. begin();
while ( itc != contours .end()) {
// compute all moments
cv ::Moments mom = cv::moments (cv:: Mat(*itc ++));
// draw mass center
cv ::circle( result,
// position of mass center converted to integer
cv ::Point( mom.m10 / mom. m00, mom .m01 / mom.m00 ),
2, cv ::Scalar( 0), 2 // draw black dot
);
}
cv ::namedWindow( "Some shape descriptors" );
cv ::imshow( "Some shape descriptors" , result);
Learning OpenCV Lecture 6 (Extracting Lines,Contours, and Components),布布扣,bubuko.com
Learning OpenCV Lecture 6 (Extracting Lines,Contours, and Components)
标签:des blog http color os strong
原文地址:http://www.cnblogs.com/starlitnext/p/3861414.html