标签:
非监督式学习对一组无标签的数据试图发现其内在的结构,主要用途包括:
K-Means算法属于非监督式学习的一种,算法的输入是:训练数据集$\{x^{(1)},x^{(2)},\ldots, x^{(m)}\}$(其中$x^{(i)}\in R^{n}$)和聚类数量$K$(将数据划分为$K$类);算法输出是$K$个聚类中心$\mu_1, \mu_2, \ldots, \mu_K$和每个数据点$x^{(i)}$所在的分类。
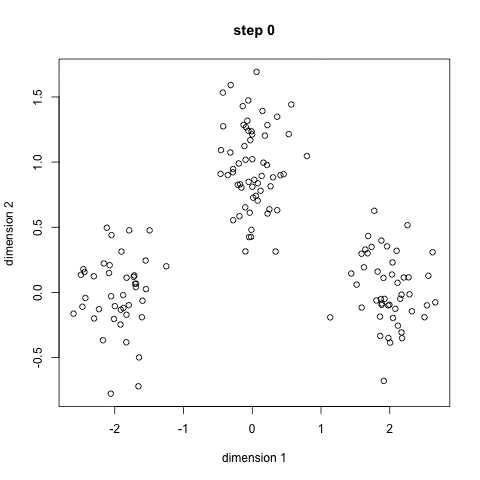 图1 K-Means算法示例
图1 K-Means算法示例
用$\mu_{c^{(i)}}$表示第$i$个数据点$x^{(i)}$所在类的中心,则K-Means优化的代价函数为$$J(c^{(1)},\ldots,c^{(m)},\mu_1,\ldots,\mu_K)=\frac{1}{m}\sum\limits_{i=1}^{m}||x^{(i)}-\mu_{c^{(i)}}||^2$$希望找到最优参数使得该函数最小化,即$$\min\limits_{\substack{c^{(1)},\ldots,c^{(m)} \\ \mu_1,\ldots,\mu_K}}J(c^{(1)},\ldots,c^{(m)},\mu_1,\ldots,\mu_K)$$
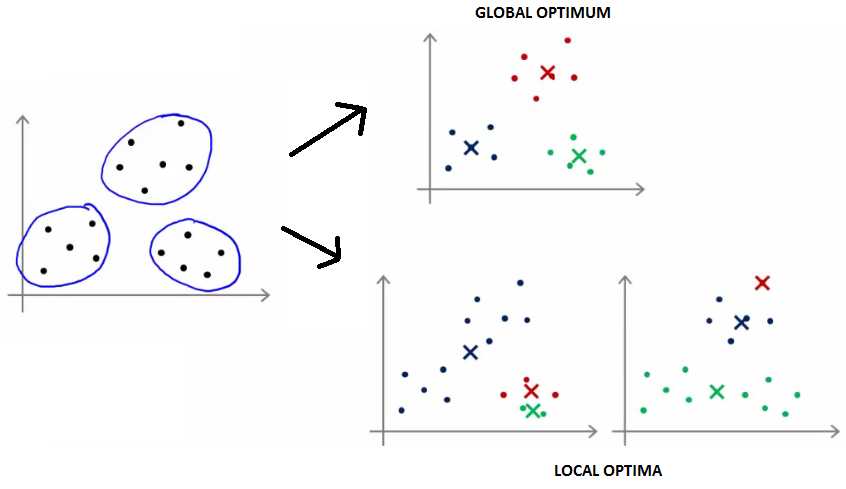
图2 K-Means算法的全局最优解和局部最优解
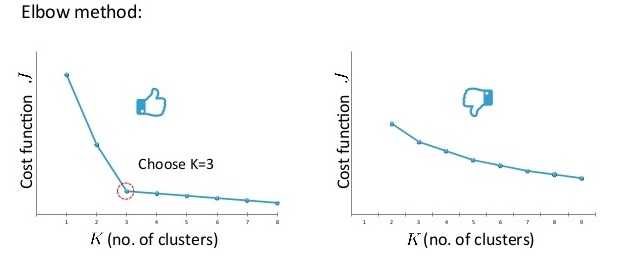 图3 用Elbow方法选择K值的情况(左)和Elbow法不适用的情况(右)
图3 用Elbow方法选择K值的情况(左)和Elbow法不适用的情况(右)
数据压缩:将高维数据(n维)压缩为低维数据(k维)
数据可视化:将数据压缩到2维/3维方便可视化
如果需要将二维数据点,压缩为一维数据点,我们需要找到一个方向,使得数据点到这个方向上投射时的误差最小(即点到该直线的距离最小);更一般地,如果需要将$n$维的数据点压缩到$k$维,我们需要找到$k$个新的方向$u^{(1)}, u^{(2)}, \ldots, u^{(k)}$使得数据点投射到每个方向$u^{(i)}$时的误差最小。
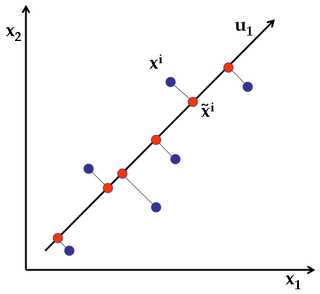
图4 PCA实例,将2维数据点压缩为1维数据点,找到新的方向$u_1$,使得投射误差(图中的垂线距离如$x^i$到${\widetilde x}^i$)最小
注意:PCA和线性回归的区别,PCA是保证投射的误差(图5右的黄线)最小,而线性回归是保证沿$y$方向的误差(图5左的黄线)最小.
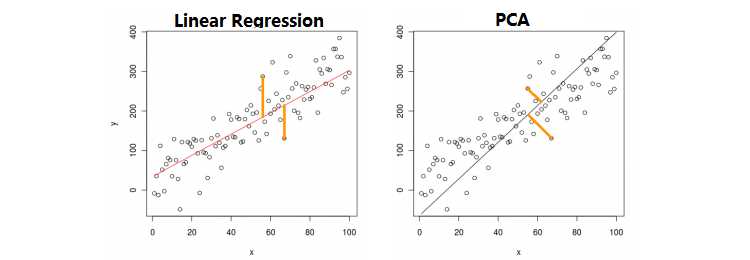 图5 线性回归和PCA优化目标的区别
图5 线性回归和PCA优化目标的区别
1. 数据预处理:mean normalization:$\mu_j = \frac{1}{m}\sum\limits_{i=1}^{m}x_j^{(i)}, x_j^{(i)}=x_j-\mu_j$;feature scaling:(可选,不同特征范围差距过大时需要) , $x_j^{(i)}=\frac{x^{(i)}-\mu_j}{\sigma_j}$
2. 计算协方差矩阵(Convariance Matrix) $$\Sigma=\frac{1}{m}\sum\limits_{i=1}^{m}x^{(i)}(x^{(i)})^T \quad \text{or} \quad \Sigma = \frac{1}{m}X^TX$$
3. 计算协方差矩阵$\Sigma$的特征向量 [U, S, V] = svd(Sigma)
4. 选择U矩阵的前k个列向量作为k个主元方向,形成矩阵$U_{reduce}$
5. 对于每个原始数据点$x$($x\in R^n$),其降维后的数据点$z$($z \in R^k$)为 $z=U_{reduce}^T x$
重构数据:对于降维后k维数据点z,将其恢复n维后的近似点为 $x_{apporx}(\approx x)=U_{reduce}z$
选择k值
[1] Andrew Ng Coursera 公开课第八周
[2] 漫谈Clustering:k-means. http://blog.pluskid.org/?p=17
[3] k-means clustering in a GIF. http://www.statsblogs.com/2014/02/18/k-means-clustering-in-a-gif/
[4] Wikipedia: Principal component analysis. https://en.wikipedia.org/wiki/Principal_component_analysis
[5] Explained Visually: Principal component analysis http://setosa.io/ev/principal-component-analysis/
标签:
原文地址:http://www.cnblogs.com/python27/p/MachineLearningWeek08.html