标签:
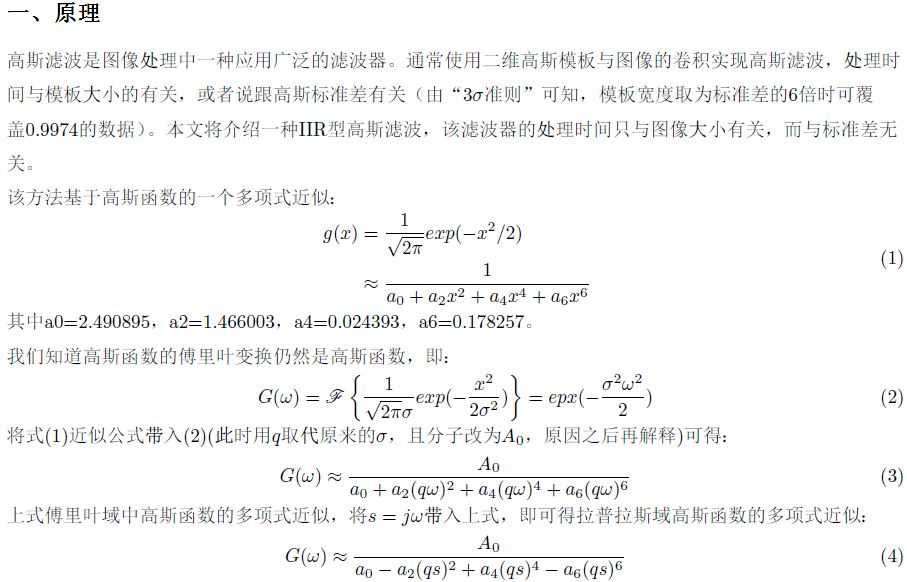
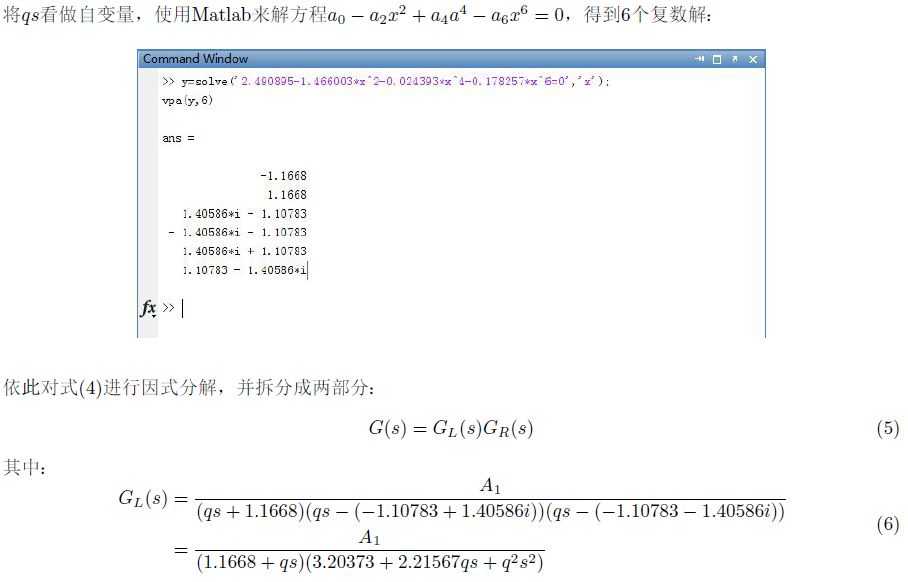
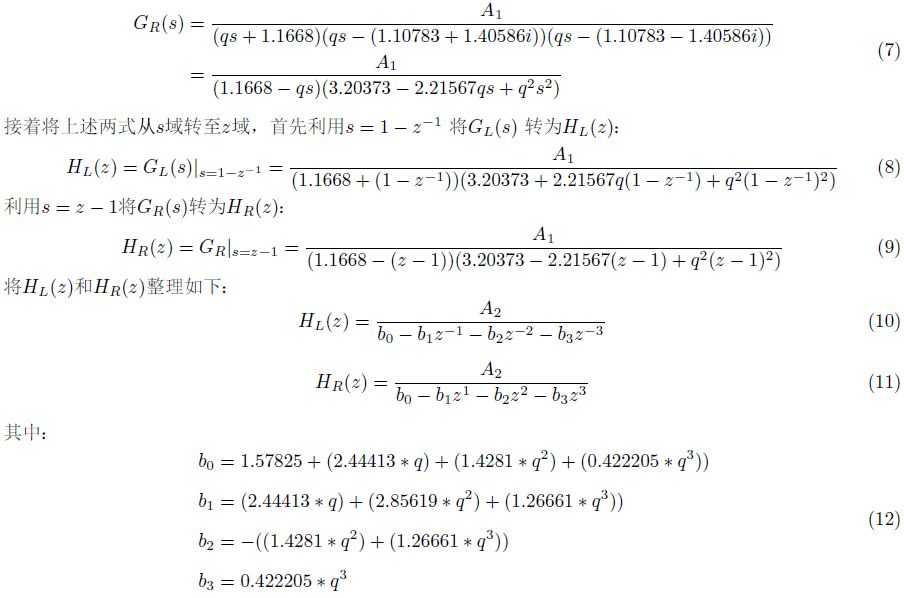


二、实现
GIMP中有IIR型高斯滤波的实现,代码位于contrast-retinex.c中,读者可自行查看。下面给出本人实现的核心代码:
#include"stdafx.h" typedef struct { float B; float b[4]; } gauss_coefs; //参数计算 void compute_coefs3(gauss_coefs *c,float sigma) { float q, q2, q3; if (sigma >= 2.5) { q = 0.98711 * sigma - 0.96330; } else if ((sigma >= 0.5) && (sigma < 2.5)) { q = 3.97156 - 4.14554 * (float) sqrt ((float) 1 - 0.26891 * sigma); } else { q = 0.1147705018520355224609375; } q2 = q * q; q3 = q * q2; c->b[0] = 1/(1.57825+(2.44413*q)+(1.4281 *q2)+(0.422205*q3)); c->b[1] = ( (2.44413*q)+(2.85619*q2)+(1.26661 *q3)) *c->b[0]; c->b[2] = ( -((1.4281*q2)+(1.26661 *q3)))*c->b[0]; c->b[3] = ( (0.422205*q3)) *c->b[0]; c->B = 1.0-(c->b[1]+c->b[2]+c->b[3]); } //IIR型高斯滤波 //**************************************************************// //参考文献:Recursive implementation of the Gaussian filter //Src:输入图像 //Dest:输出图像 //sigma:高斯标准差 //**************************************************************// IS_RET IIRGaussianFilter(TMatrix *Src,TMatrix *Dest,float sigma) { int X,Y,Width=Src->Width,Height=Src->Height,Stride=Src->WidthStep,Channel=Src->Channel; gauss_coefs c; compute_coefs3(&c,sigma); unsigned char *LinePS,*LinePD; float *Buff,*BPointer,*w1,*w2; Buff=(float*)malloc(sizeof(float)*Height*Width);//缓存 if(Buff==NULL){return IS_RET_ERR_OUTOFMEMORY;} for(int i=0;i<Channel;i++) { LinePS=Src->Data+i; LinePD=Dest->Data+i; //拷贝原图至缓存Buff BPointer=Buff; for (Y=0;Y<Height;Y++) { for (X=0;X<Width;X++) { BPointer[0]=float(LinePS[0]); BPointer++; LinePS+=Channel; } LinePS+=Stride-Width*Channel; } //横向滤波 BPointer=Buff; w1=(float*)malloc(sizeof(float)*(Width+3)); if(w1==NULL){return IS_RET_ERR_OUTOFMEMORY;} w2=(float*)malloc(sizeof(float)*(Width+3)); if(w2==NULL){return IS_RET_ERR_OUTOFMEMORY;} for(Y=0;Y<Height;Y++) { //前向滤波 w1[0]=w1[1]=w1[2]=BPointer[0]; for(int n=3,i=0;i<Width;n++,i++) { w1[n]=c.B*BPointer[i]+(c.b[1]*w1[n-1]+c.b[2]*w1[n-2]+c.b[3]*w1[n-3]); } //后向滤波 w2[Width]=w2[Width+1]=w2[Width+2]=w1[Width+2]; for(int n=Width-1;n>=0;n--) { BPointer[n]=w2[n]=c.B*w1[n+3]+(c.b[1]*w2[n+1]+c.b[2]*w2[n+2]+c.b[3]*w2[n+3]); } BPointer+=Width; } //纵向滤波 BPointer=Buff; w1=(float*)realloc(w1,sizeof(float)*(Height+3)); if(w1==NULL){return IS_RET_ERR_OUTOFMEMORY;} w2=(float*)realloc(w2,sizeof(float)*(Height+3)); if(w2==NULL){return IS_RET_ERR_OUTOFMEMORY;} for (X=0;X<Width;X++) { //前向滤波 w1[0]=w1[1]=w1[2]=BPointer[0]; for(int n=3,i=0;i<Height;n++,i++) { w1[n]=c.B*BPointer[i*Width]+(c.b[1]*w1[n-1]+c.b[2]*w1[n-2]+c.b[3]*w1[n-3]); } //后向滤波 w2[Height]=w2[Height+1]=w2[Height+2]=w1[Height+2]; for(int n=Height-1;n>=0;n--) { BPointer[n*Width]=w2[n]=c.B*w1[n+3]+(c.b[1]*w2[n+1]+c.b[2]*w2[n+2]+c.b[3]*w2[n+3]); } BPointer++; } //拷贝缓存至结果 BPointer=Buff; for(Y=0;Y<Height;Y++) { for(X=0;X<Width;X++) { LinePD[0]=BPointer[0]; if(BPointer[0]>255)LinePD[0]=255; if(BPointer[0]<0)LinePD[0]=0; BPointer++; LinePD+=Channel; } LinePD+=Stride-Width*Channel; } free(w1); free(w2); } return IS_RET_OK; }
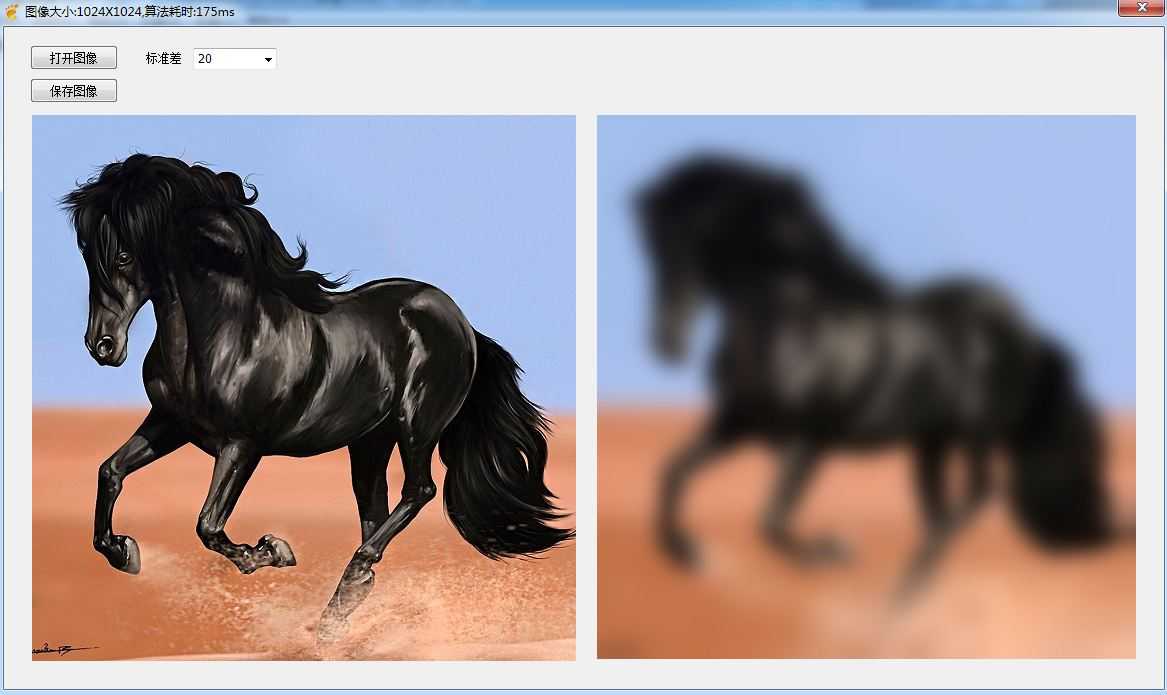
实验结果:对一幅1024*1024的彩色图像,算法耗时175ms。
参考文献:
Young I T, Van Vliet L J. Recursive implementation of the Gaussian filter[J]. Signal processing, 1995, 44(2): 139-151.
标签:
原文地址:http://www.cnblogs.com/luo-peng/p/5223910.html