标签:
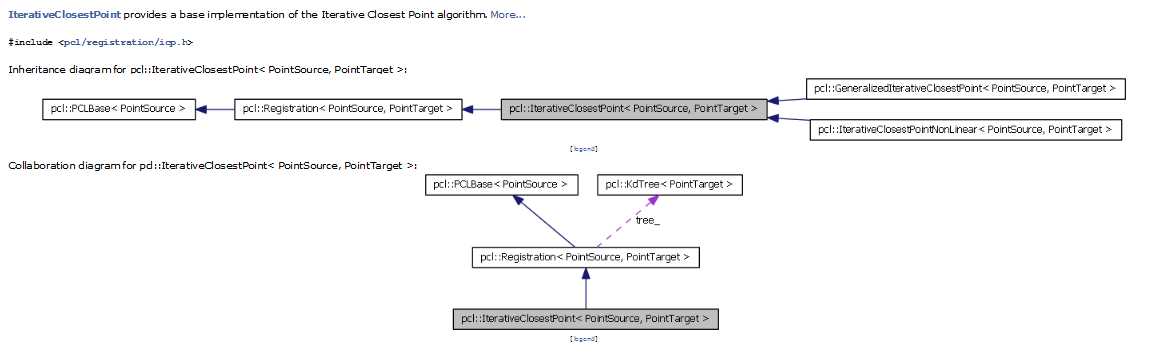
1 IterativeClosestPoint () 2 { 3 reg_name_ = "IterativeClosestPoint"; 4 ransac_iterations_ = 1000; 5 transformation_estimation_.reset (new pcl::registration::TransformationEstimationSVD<PointSource, PointTarget>); 6 };
1 IterativeClosestPointNonLinear () 2 { 3 min_number_correspondences_ = 4; 4 reg_name_ = "IterativeClosestPointNonLinear"; 5 6 transformation_estimation_.reset (new pcl::registration::TransformationEstimationLM<PointSource, PointTarget>); 7 }

标签:
原文地址:http://www.cnblogs.com/yhlx125/p/4924283.html