标签:
随着工业的发展,工程师们对电机提出各种新的和更高的要求。为了适应自动化技术的需要,他们将新的控制技术与控制芯片相结合,发明了一系列控制电机。控制电机有很多种类,包括伺服电动机、测速发电机、直整角机、旋转变压器及步进电动机等。控制电机能满足不同工作条件下的需要,因此得到了广泛的发展。
直流电机在恒速时的电压方程为常系数的线性微分方程,在电机控制中能进行快速的转矩和磁通控制。而异步电机是一个多变量、强耦合、非线性的时变参数系统,很难直接通过外加信号准确控制其电磁转矩。但若以转子磁通这一旋转的空间矢量为参考坐标,应用Kron的"电机统一理论",利用从静止坐标系到旋转坐标系之间的变换,则可以把定子电流中的励磁电流分量与转矩电流分量变成标量独立开来,分别进行控制。这样,通过坐标变换重建的电机模型就可等效为一台直流电机,从而减轻控制难度,为工程师们带来方便。
实际工程系统中往往涵盖了许多领域,很多物理符号在表示时会产一些困难,因此,采用统一的语言描述各种多通口,并对通用图解中各种功率变量进行分类是很有必要的。将功率变量统一称作势变量和流变量,可以解决任何含义表达不明确的问题。在研究问题时,只需要建立通口功率、势变量、流变量、广义动量及广义位移之间的联系方程,就能通过物理系统建模分析各种工程系统。而且,当系统动力学采用国际单位体制时,就可以避免功率和能量的单位换算。通过这样标准化的建模,我们就可以分析多通口元件之间功率传递的过程。
Openmodelica仿真
修改后的代码:
model motor1
Real Tm;
Real n;
Real i;
Real u;
parameter Real J = 0.01;
parameter Real R = 0.1;
parameter Real Kt = 1.5;
parameter Real Ke = 1.5;
parameter Real Tl = 2;
equation
if time <= 0.1 then
u = 50;
else
u = 100;
end if;
Tm-Tl = J * der(n);
Tm= Kt * i;
u= i * R + Ke * n;
end motor1;
仿真结果:
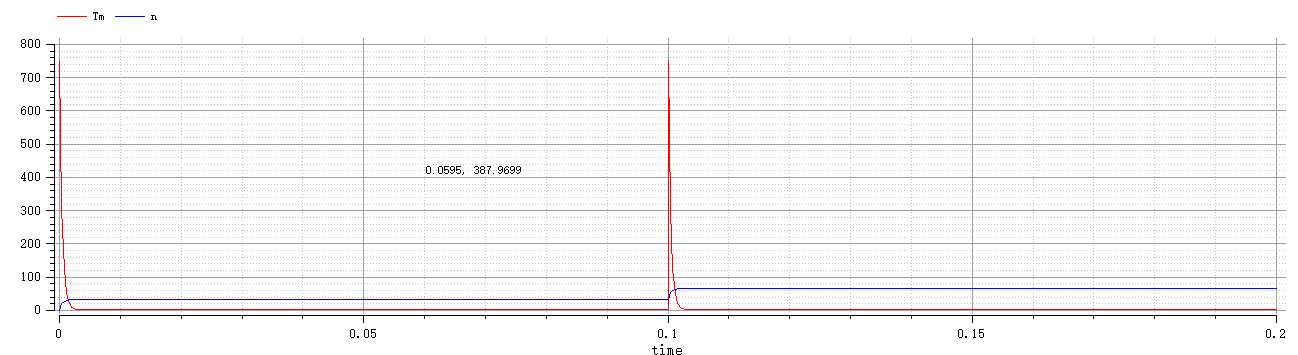
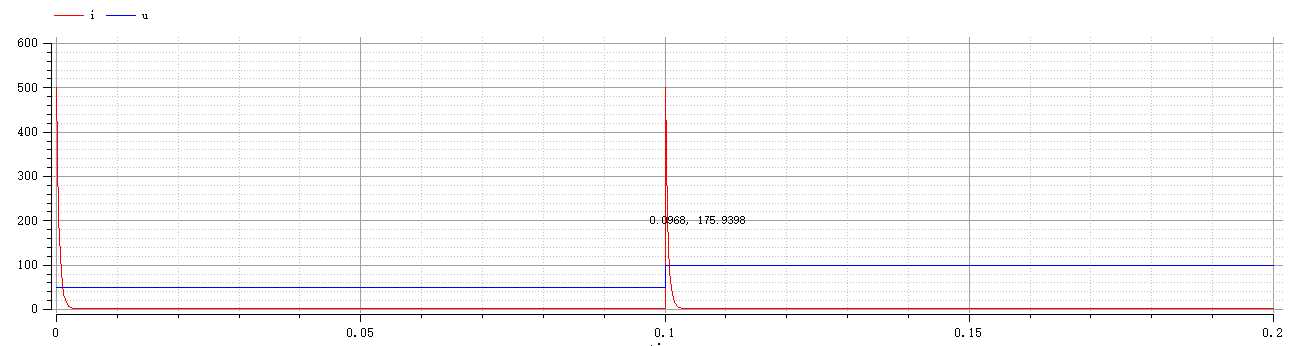
多次改变预设值,观察图像变化是否与Tm-Tl = J * der(n)、Tm= Kt * i、u= i * R + Ke * n三个公式保持一致。仿真代码无误,结果正常。
标签:
原文地址:http://www.cnblogs.com/yangliu1/p/5247706.html