标签:
有一种很重要的概率图模型用于SLAM,视觉追踪,识别,传感融合等领域,称为为Template Model. 其特征是每个状态具有多个随机变量,下个状态随机变量的取值受到上个状态的影响。并且随机变量之间的交互属于复制关系。如下图所示:
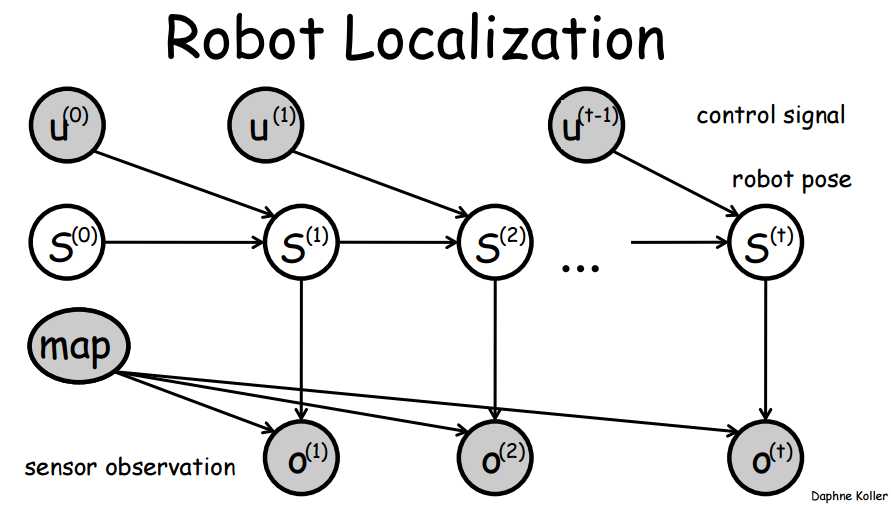
显然,普通的概率图模型的图是确定的,并不会图的结构不会改变,而这种Template Model的图结构会随着时间的改变自行增殖,故此模型的推理算法需要单独讨论。
一种简单的思路是在某个时间点对图模型进行截断,将增殖的PGM变为固定的PGM,再在图模型上运行推理算法。
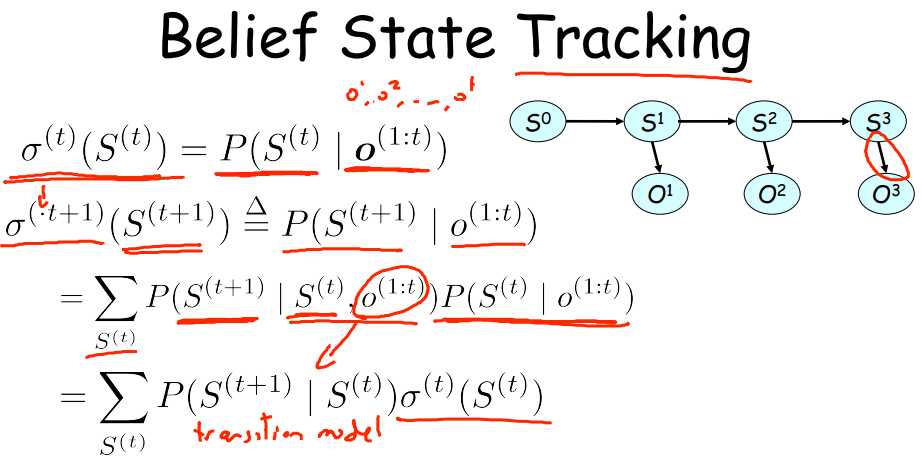
对如图所示结构而言,获得的信息是1~t时间传感器的观测值。算法目标是推测St时刻的状态。定义s(t+1)时刻的“猜测状态为xigma_dot_(t+1),可知,其分布为t时刻状态的和。也就是t时刻取值的线性组合。在给定t+1时刻的观测时,s(t+1)可表达为下式:
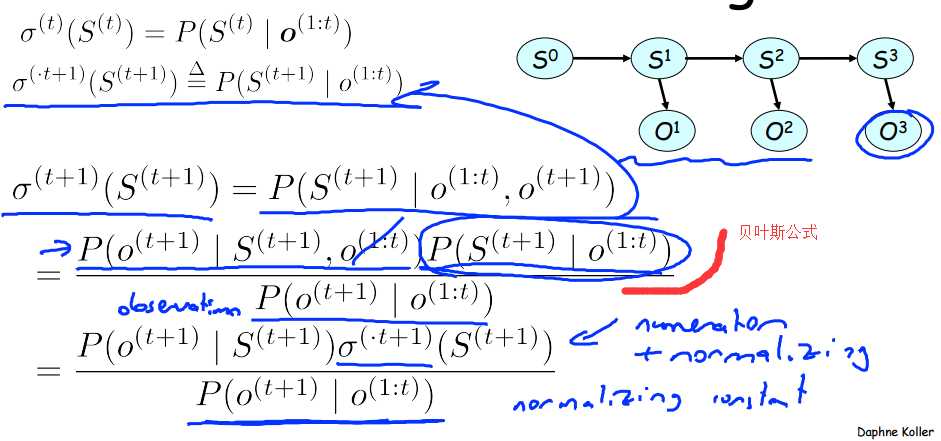
s(t+1)真正的值实际上和t+1时刻的观测,对t+1时刻的猜测,以及分母——对t+1时刻观测量的猜测有关。分母实际上是一个跟状态无关的常数,最后求不同状态S取值比例的时候分母是可以忽略的。所以重要的是分子。分子和两个量有关,第一个是观测模型,第二个是t+1时刻状态猜测量。而状态猜测量是线性组合,每次计算都可以直接带入上次结果。所以,这种结构的Template Model算起来并不会非常困难。
标签:
原文地址:http://www.cnblogs.com/ironstark/p/5251735.html