标签:
二维高斯函数具有旋转对称性,处理后不会对哪一个方向上的边缘进行了过多的滤波,因此相对其他滤波器,具有无法比拟的优越性。但是传统Gauss滤波随着图像尺寸的增加,运算复杂度呈平方上涨,因此需要对其优化改进。下面,分别介绍传统型,分解型和递归迭代型三种实现方法。
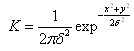
Gauss滤波首先需要构建一个Gauss滤波核,公式为:
Matlab实现代码:
dSigma =0.8;
fK1=1.0/(2*dSigma*dSigma);
fK2=fK1/pi;
iSize = 5;
step = floor(iSize/2 + 0.5);
for i = 1 : iSize
x=i-step;
fTemp=fK2*exp(-x*x*fK1);
for j = 1 : iSize
y=j-step;
model(x+step,y+step)=fTemp*exp(-y*y*fK1);
end
end
dSum = sum(sum(model));
model = model/dSum; %Gauss核数值归一化
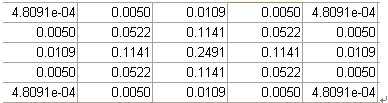
图1 Gauss滤波核(5*5大小)
接下来就是将输入图像和滤波核进行卷积操作。其实质就是对原始图像进行加权求和,把这个“和”赋给中心像素。对于一个2048*2048的图像,需要进行104734756次乘法运算,和104734756次加法运算,运算复杂度是很高的。
我们可以把一个二维Gauss核分解为两个一维高斯核,然后先对行做一次一维卷积,再对这个卷积结果做一次一维列卷积,得到的结果完全一模一样,而开销会小很多。
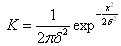
一维高斯核函数:
Matlab代码实现:
dSigma =0.8;
fK1=1.0/(2*dSigma*dSigma);
fK2=fK1/pi;
iSize = 5;
step = floor(iSize/2 + 0.5);
for i = 1 : iSize
x=i-step;
fTemp=fK2*exp(-x*x*fK1);
model(1,x+step) = fTemp;
end
dM = sum(model);
model = model / dM;

图2 一维高斯滤波核(1*5大小)
一维卷积原理和二维卷积一样,只不过我们只需要将同一行或同一列上的数据,按位置一一加权求和,再把“和”赋给中心元素。
对于一个2048*2048的图像,需要进行41918464次乘法运算,和41918464次加法运算。相比传统运算量,只是前者的1/2.4985。如果遇到频繁计算Gauss滤波的算法,后者明显比前者速度快很多。
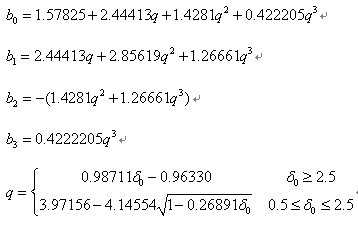
第二种方法较第一种方法,虽然有了较大改善,但是任然复杂度较高。这里再介绍一种更快速的逼近Gauss滤波方法。
具体步骤分为两步:首先对图像做一次前向滤波,其次,对图像再做一次后向滤波。
Forward:

Backward:

qFactor = 5; b0Coeff = 1.57825 + (2.44413 * qFactor) + (1.4281 * qFactor * qFactor) + (0.422205 * qFactor * qFactor * qFactor); b1Coeff = (2.44413 * qFactor) + (2.85619 * qFactor * qFactor) + (1.26661 * qFactor * qFactor * qFactor); b2Coeff = (-1.4281 * qFactor * qFactor) + (-1.26661 * qFactor * qFactor * qFactor); b3Coeff = 0.422205 * qFactor * qFactor * qFactor; normalizationCoeff = 1 - ((b1Coeff + b2Coeff + b3Coeff) / b0Coeff); vDenCoeff = [b0Coeff, -b1Coeff, -b2Coeff, -b3Coeff] / b0Coeff; vXSignal = zeros(61, 1); vXSignal(31) = 10; vYSignal = filter(normalizationCoeff, vDenCoeff, vXSignal); vYSignal = filter(normalizationCoeff, vDenCoeff, vYSignal(end:-1:1)); figure(); plot(vYSignal);
参考资料:Recursive implementation of the Gaussian filter。 Ian T. Young,1995
http://dsp.stackexchange.com/questions/22075/recursive-implementation-of-the-gaussian-filter
标签:
原文地址:http://www.cnblogs.com/miki-52/p/5289062.html