标签:
计算机视觉课堂笔记
回顾:特征提取中分为点(Harris等),线(Canny算子),区域(MSER)等特征的提取。
相应的特征匹配就会有特征点匹配,直线匹配,曲线匹配,区域匹配。
而在众多研究中以点匹配居多,点匹配的基本原则:利用图像点周围的信息来描述点,如灰度信息,颜色信息,梯度信息等,然后进行 相似性度量。
点匹配典型方法:
基于灰度分布的匹配:Cross-correlation;
基于梯度分布的匹配:SIFT;Daisy descriptor;
其他匹配方法:Eigenvector;ICP;RANSAC。
1.Cross-correlation:在位置对应点附近划出一个大框,在这个框中对每一个像素点附近使用小框进行逐一的相关函数计算,得到相似度最高的作为匹配点。(有诸多缺陷)
2.SIFT:
http://www.cnblogs.com/simayuhe/p/5295956.html
http://www.cnblogs.com/cuteshongshong/archive/2012/05/25/2506374.html
3.Daisy descriptor:与SIFT作对比的一种方法,特点在于,他并没有进行特征点提取,而是对整幅图像进行梯度运算并进行高斯滤波,得到梯度图像,然后对每个像素构建描述子(这里构建的描述子的长度是200维的)
***4.ICP(Iterative Closest Point):目标是对齐两个相互交叠的曲面。
4.1首先,研究:假如已知两个对应的点集合如何寻找他们之间的对应关系?
X={x1,x2,...,xn},P={p1,p2,...,pn}
这个思想很经典:先计算二者的均值,以去掉平移的影响;进行SVD分解,得到的R=UV‘为旋转变换;进而求得平移变换t。
4.2然后,我们要考虑的问题:如何找到对应点?
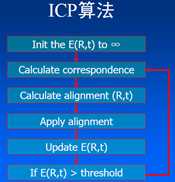
ICP给出的方案就是把"最近"的点先认为是对应点,然后算R,t,算完了之后再带回去去找下一组最近的点,再更新R,t,直到E(R,t)小于某个阈值为止。截图如下:
4.3接下来要解决的问题:什么样的点才是最近的点?
给出了几种候选:最近邻点,法方向最近邻,投影法。几种方法各有优势,适用于不同的问题而已。
截图来源:http://vision.ia.ac.cn/zh/teaching/index.html
标签:
原文地址:http://www.cnblogs.com/simayuhe/p/5296004.html