标签:
支持向量机是一个二类分类模型,但也可以扩展为多类分类。其基于间隔最大化和核技巧的特点可以使它可以灵活处理线性或非线性分类问题。
支持向量机可是形式化为一个凸二次规划问题,学习算法是求解基于凸二次规划的最优化算法。
按照训练数据是否线性可分,支持向量机可以分为基于硬间隔的线性可分支持向量机、基于软间隔的线性支持向量机、基于核技巧和软间隔最大化的非线性支持向量机。三者复杂性是依次增加的。
1、基于硬间隔最大化的线性可分支持向量机
我们知道,感知机和决策树等学习方法没有区分模型的输入空间和特征空间,即认为两者所处的空间是一样的。支持向量机的输入空间和特征空间是不同的,输入空间为欧氏空间或离散集合,特征空间是希尔伯特空间。希尔伯特空间可以看作是欧氏空间的扩展,其空间维度可以是任意维的,包括无穷维。并且一个重要的性质是其具有欧氏空间不具备的完备性。这些特点都是支持向量机在做非线性特征空间映射所需要的。
下面从最简单的线性可分支持向量机入手,学过感知机的都知道,感知机通过训练一个超平面将平面或空间线性可分的点进行划分。
其超平面方程为 w?x+b=0;
分类决策函数f(x)=sign(w?x+b)。
线性可分支持向量机也是如此,通过找寻分割平面来划分数据集。不同的是,感知机的学习策略是误分类点到超平面距离和最小化,而线性可分支持向量机是基于硬间隔最大化的。
何为硬间隔最大化?
我们知道,当参数w,b确定后,其分类超平面也就确定了,那么分类超平面两侧的点到超平面的距离就可以得出,
这些点到分类超平面中必然有一个最小距离,实际上可划分这两组点的超平面的参数w,b有很多组,同样对应有最小距离。w,b选取什么值时,分类效果最好呢?就是分类面到两侧的距离越远说明分类效果越好,即找出这组最小距离中的最大值。为了度量这个值,这里引出了函数间隔和几何间隔的概念。
在超平面

而
函数间隔:对于给定的训练数据集T和超平面(w,b),定义超平面(w,b)关于样本点


 的几何间隔为:
的几何间隔为: 




 ?随着w,b成比例的变化而成同比例的变化,即若w,b同时变为原来的两倍,则函数间隔也为原来的两倍,故当w,b成比例变化时,目标函数不变,约束条件也不变。也就是说
?随着w,b成比例的变化而成同比例的变化,即若w,b同时变为原来的两倍,则函数间隔也为原来的两倍,故当w,b成比例变化时,目标函数不变,约束条件也不变。也就是说 取值并不影响目标函数和约束条件,不影响整个问题的 =1,从而目标函数可以写为:
取值并不影响目标函数和约束条件,不影响整个问题的 =1,从而目标函数可以写为: 
 的最大等价于求||w||的最小,也就等价于求
的最大等价于求||w||的最小,也就等价于求 的最小,从而将问题改写为:
的最小,从而将问题改写为:  的最大等价求的最小,是因为要将目标函数转换为一个凸二次规划问题,从而满足后面求对偶问题需要的KKT条件。系数加个1/2是为了求导的时候约去系数,计算方便。
的最大等价求的最小,是因为要将目标函数转换为一个凸二次规划问题,从而满足后面求对偶问题需要的KKT条件。系数加个1/2是为了求导的时候约去系数,计算方便。 
 ≥0,且根据拉格朗日乘子法的形式将约束条件添加负号转化为小于等于,定义拉格朗日函数:
≥0,且根据拉格朗日乘子法的形式将约束条件添加负号转化为小于等于,定义拉格朗日函数: 

 的解。
的解。 
 对α的极大,即:
对α的极大,即: 


 =1,将替换1,并提取
=1,将替换1,并提取 ,可以算出:
,可以算出: 


2、基于软间隔最大化的线性支持向量机
上面所说的线性可分支持向量机是基于训练样本线性可分的理想状态,当训练样本中存在噪声或者特异点而造成线性不可分时,就需要用到下面讲到的线性支持向量机。
在线性可分支持向量机中,我们假设函数间隔
(0,1)中间,那么这些点就不满足问题的约束条件,也就线性不可分。为了解决这样的问题,引入了松弛变量

 尽可能小即间隔尽可能大,一个是误分类点尽可能少,C作为两者的调和系数。
尽可能小即间隔尽可能大,一个是误分类点尽可能少,C作为两者的调和系数。 

支持向量
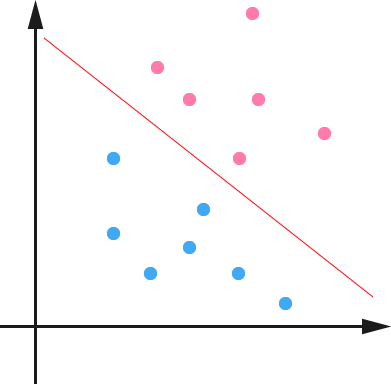
之前一直说到支持向量机,那么什么是支持向量呢?支持向量机是基于间隔最大化来分类数据集的。在硬间隔最大化的情况下,如下图的红线为分离超平面,粉线和蓝线是将两类点分开的最大间隔线,其到分离超平面的距离分别为

在软间隔最大化的情况下,
如下图,每个实例点到超平面的距离为
支持向量由间隔边界(如红圈点)、间隔边界与超平面之间(如绿圈点)或误分点(如蓝圈点)这些对分类起着关键作用的点组成。
3、基于软间隔和核技巧的非线性支持向量机
前面说的数据集都是线性可分或者近似可分的,而实际情况下的数据都是非线性可分的。
这时就需要用到非线性变换,将输入空间上的输入映射到高维特征空间,将非线性问题变换为线性问题,从而利用线性分类器进行分类。例如:
对于非线性的方程





标签:
原文地址:http://blog.csdn.net/shijing_0214/article/details/50982602
