标签:
Having defined neural networks, let‘s return to handwriting recognition. We can split the problem of recognizing handwritten digits into two sub-problems. First, we‘d like a way of breaking an image containing many digits into a sequence of separate images, each containing a single digit. For example, we‘d like to break the image

into six separate images,

We humans solve this segmentation problem with ease, but it‘s challenging for a computer program to correctly break up the image. Once the image has been segmented, the program then needs to classify each individual digit. So, for instance, we‘d like our program to recognize that the first digit above,

is a 5.
We‘ll focus on writing a program to solve the second problem, that is, classifying individual digits. We do this because it turns out that the segmentation problem is not so difficult to solve, once you have a good way of classifying individual digits. There are many approaches to solving the segmentation problem. One approach is to trial many different ways of segmenting the image, using the individual digit classifier to score each trial segmentation. A trial segmentation gets a high score if the individual digit classifier is confident of its classification in all segments, and a low score if the classifier is having a lot of trouble in one or more segments. The idea is that if the classifier is having trouble somewhere, then it‘s probably having trouble because the segmentation has been chosen incorrectly. This idea and other variations can be used to solve the segmentation problem quite well. So instead of worrying about segmentation we‘ll concentrate on developing a neural network which can solve the more interesting and difficult problem, namely, recognizing individual handwritten digits.
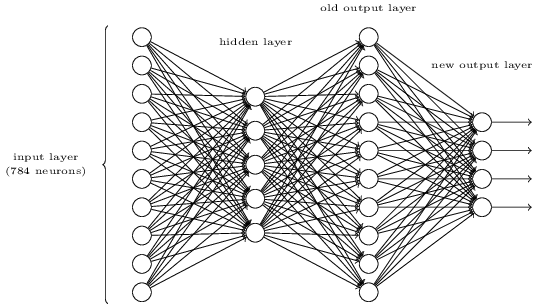
To recognize individual digits we will use a three-layer neural network:
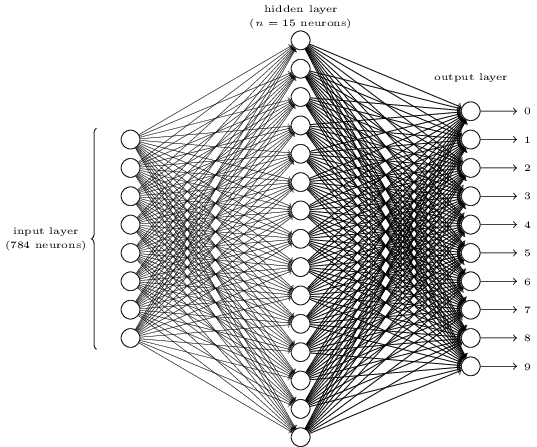
The input layer of the network contains neurons encoding the values of the input pixels. As discussed in the next section, our training data for the network will consist of many 2828 by 2828 pixel images of scanned handwritten digits, and so the input layer contains 784=28×28784=28×28 neurons. For simplicity I‘ve omitted most of the 784784 input neurons in the diagram above. The input pixels are greyscale, with a value of 0.00.0 representing white, a value of 1.01.0representing black, and in between values representing gradually darkening shades of grey.
The second layer of the network is a hidden layer. We denote the number of neurons in this hidden layer by nn, and we‘ll experiment with different values for nn. The example shown illustrates a small hidden layer, containing just n=15n=15 neurons.
The output layer of the network contains 10 neurons. If the first neuron fires, i.e., has an output ≈1≈1, then that will indicate that the network thinks the digit is a 00. If the second neuron fires then that will indicate that the network thinks the digit is a 11. And so on. A little more precisely, we number the output neurons from 00 through99, and figure out which neuron has the highest activation value. If that neuron is, say, neuron number 66, then our network will guess that the input digit was a 66. And so on for the other output neurons.
You might wonder why we use 1010 output neurons. After all, the goal of the network is to tell us which digit (0,1,2,…,90,1,2,…,9) corresponds to the input image. A seemingly natural way of doing that is to use just44 output neurons, treating each neuron as taking on a binary value, depending on whether the neuron‘s output is closer to 00 or to 11. Four neurons are enough to encode the answer, since 24=1624=16 is more than the 10 possible values for the input digit. Why should our network use 1010 neurons instead? Isn‘t that inefficient? The ultimate justification is empirical: we can try out both network designs, and it turns out that, for this particular problem, the network with 1010output neurons learns to recognize digits better than the network with 44 output neurons. But that leaves us wondering why using 1010output neurons works better. Is there some heuristic that would tell us in advance that we should use the 1010-output encoding instead of the 44-output encoding?
To understand why we do this, it helps to think about what the neural network is doing from first principles. Consider first the case where we use 1010 output neurons. Let‘s concentrate on the first output neuron, the one that‘s trying to decide whether or not the digit is a 00. It does this by weighing up evidence from the hidden layer of neurons. What are those hidden neurons doing? Well, just suppose for the sake of argument that the first neuron in the hidden layer detects whether or not an image like the following is present:
It can do this by heavily weighting input pixels which overlap with the image, and only lightly weighting the other inputs. In a similar way, let‘s suppose for the sake of argument that the second, third, and fourth neurons in the hidden layer detect whether or not the following images are present:
As you may have guessed, these four images together make up the 00image that we saw in the line of digits shown earlier:
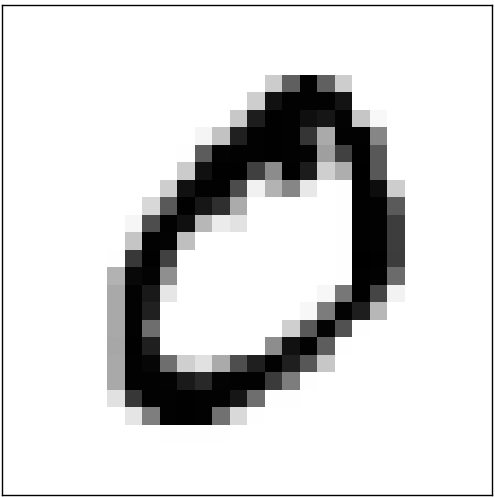
So if all four of these hidden neurons are firing then we can conclude that the digit is a 00. Of course, that‘s not the only sort of evidence we can use to conclude that the image was a 00 - we could legitimately get a 00 in many other ways (say, through translations of the above images, or slight distortions). But it seems safe to say that at least in this case we‘d conclude that the input was a 00.
Supposing the neural network functions in this way, we can give a plausible explanation for why it‘s better to have 1010 outputs from the network, rather than 44. If we had 44 outputs, then the first output neuron would be trying to decide what the most significant bit of the digit was. And there‘s no easy way to relate that most significant bit to simple shapes like those shown above. It‘s hard to imagine that there‘s any good historical reason the component shapes of the digit will be closely related to (say) the most significant bit in the output.
Now, with all that said, this is all just a heuristic. Nothing says that the three-layer neural network has to operate in the way I described, with the hidden neurons detecting simple component shapes. Maybe a clever learning algorithm will find some assignment of weights that lets us use only 44 output neurons. But as a heuristic the way of thinking I‘ve described works pretty well, and can save you a lot of time in designing good neural network architectures.
Now that we have a design for our neural network, how can it learn to recognize digits? The first thing we‘ll need is a data set to learn from - a so-called training data set. We‘ll use the MNIST data set, which contains tens of thousands of scanned images of handwritten digits, together with their correct classifications. MNIST‘s name comes from the fact that it is a modified subset of two data sets collected by NIST, the United States‘ National Institute of Standards and Technology. Here‘s a few images from MNIST:
As you can see, these digits are, in fact, the same as those shown at the beginning of this chapter as a challenge to recognize. Of course, when testing our network we‘ll ask it to recognize images which aren‘t in the training set!
The MNIST data comes in two parts. The first part contains 60,000 images to be used as training data. These images are scanned handwriting samples from 250 people, half of whom were US Census Bureau employees, and half of whom were high school students. The images are greyscale and 28 by 28 pixels in size. The second part of the MNIST data set is 10,000 images to be used as test data. Again, these are 28 by 28 greyscale images. We‘ll use the test data to evaluate how well our neural network has learned to recognize digits. To make this a good test of performance, the test data was taken from a different set of 250 people than the original training data (albeit still a group split between Census Bureau employees and high school students). This helps give us confidence that our system can recognize digits from people whose writing it didn‘t see during training.
We‘ll use the notation xx to denote a training input. It‘ll be convenient to regard each training input xx as a 28×28=78428×28=784-dimensional vector. Each entry in the vector represents the grey value for a single pixel in the image. We‘ll denote the corresponding desired output by y=y(x)y=y(x), where yy is a 1010-dimensional vector. For example, if a particular training image, xx, depicts a 66, then y(x)=(0,0,0,0,0,0,1,0,0,0)Ty(x)=(0,0,0,0,0,0,1,0,0,0)T is the desired output from the network. Note that TT here is the transpose operation, turning a row vector into an ordinary (column) vector.
What we‘d like is an algorithm which lets us find weights and biases so that the output from the network approximates y(x)y(x) for all training inputs xx. To quantify how well we‘re achieving this goal we define a cost function**Sometimes referred to as a loss or objectivefunction. We use the term cost function throughout this book, but you should note the other terminology, since it‘s often used in research papers and other discussions of neural networks.:
Here, ww denotes the collection of all weights in the network, bb all the biases, nn is the total number of training inputs, aa is the vector of outputs from the network when xx is input, and the sum is over all training inputs, xx. Of course, the output aa depends on xx, ww and bb, but to keep the notation simple I haven‘t explicitly indicated this dependence. The notation