标签:
第一次处理地理位置的数据的人,没什么经验,往往掉入很多坑浪费不少时间。我也是刚刚从坑里爬出来。这篇博文主要是把入门GPS轨迹分析的经验总结一下,以方便大家少走些弯路。
(1)可视化 GPS 路径
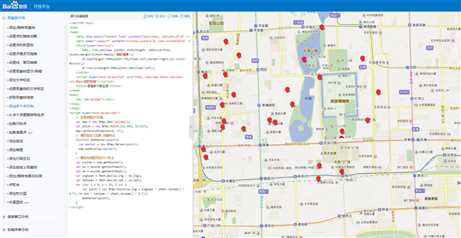
刚拿到一堆GPS轨迹数据,想看看它长什么样?于是先想办法把它们可视化出来。有很多地图的API可以用,如果不是想搞演示,只是为了快速随便看一眼的话,推荐用百度的在线示例API http://developer.baidu.com/map/jsdemo.htm#c1_3 里面有比较详细的例子,很丰富的操作,修改代码也比较简单。 当然也可以把源代码copy下来在本地操作。
(2) 坐标格式
一般从GPS得到的数据是经纬度。经纬度有多种表示方法。
1.) ddd.ddddd, 度 . 度的十进制小数部分(5位)例如:31.12035º
2.) ddd.mm.mmm,度 . 分 . 分的十进制小数部分(3位)例如 31º10.335‘
3.) ddd.mm.ss, 度 . 分 . 秒 例如 31º12‘42"
在应用程序中基本都用格式1),所以首先要确定你的原始数据格式是否是格式1),如果不是,需要转换,方法比较简单。 一个从2)转换成1)的程序如下:
public Point(double longitude, double latitude ) { int degree = (int)(longitude); this.longitude = (longitude - degree) * 100 / 60 + degree; degree = (int)(latitude); this.latitude = (latitude - degree) *100 / 60 + degree; }
(3)坐标纠偏
刚拿到GPS轨迹数据的时候,直接print到地图上,发现路线比较奇怪,没有和道路完全吻合,很像偏移了一些,甚至会穿越没有道路的地方。 起初以为是GPS精度的问题。后来经人提醒,GPS坐标是有好几套标准的。 有兴趣的同学可以阅读更多资料例如 http://yanue.net/post-121.html , 这里简单的说明什么是坐标偏移:
天朝为了保卫国家安全,对真实坐标系统进行人为的加偏处理,把真实的坐标加密成虚假的坐标,称为火星坐标。这种偏移是非线性的,偏移方向也不确定。 除了火星坐标系统,不同的地图数据商也可能使用自己的坐标系统,例如百度。 国内各地图API坐标系统比较详情请见http://www.cnblogs.com/Tangf/archive/2012/03/15/2398397.html 。 所以天朝所有准许上市的地图类产品都不是真实坐标系统。要想在某个地图API上正确的显示GPS轨迹,必须要先把数据转换成它的坐标系统。
这里还是以百度地图为例。假如我有原始(真实的)GPS数据,要在百度地图上正确显示,就需要先变成百度坐标系。 坐标转换的API说明在 http://lbsyun.baidu.com/index.php?title=webapi/guide/changeposition 可以看到,这个API支持从很多种不同的坐标系统转换到百度坐标系(但是不支持转换到百度坐标系以外的模式,吐槽一下)。 自己写个程序批量地转换,速度有点慢,一次只能发10个点左右。 在线演示在http://developer.baidu.com/map/jsdemo.htm#c1_3
把其中的坐标改成你自己的数据,再找到这行代码:
convertor.translate(pointArr, 3, 5, translateCallback)
其中的3,5表示从火星坐标转换到百度坐标; 如果改成1 , 5 则是从原始坐标转换到百度坐标,点击运行。
在我自己的数据上的效果如下:

很明显经过处理之后,路径才是正确的。
另外,高德地图采用的是火星坐标,也可以玩玩 http://lbs.amap.com/api/javascript-api/example/marker/marker-content/
原始坐标和火星坐标是可以相互转换的,需要一个小型辅助数据库,这里就不贴代码了,如有需要请留言。
这里附上百度坐标和火星坐标的c#转换代码:
public static Point Baidu2Mars(Point a) { Point b = new Point(); double x = a.longitude - 0.0065; double y= a.latitude - 0.006; double z = Math.Sqrt(x * x + y * y) - 0.00002 * Math.Sin(y * Math.PI / 180); double theta = Math.Atan2(y, x) - 0.000003 * Math.Cos(x * Math.PI / 180); b.longitude = z * Math.Cos(theta); b.latitude = z * Math.Sin(theta); return b; } public static Point Mars2Baidu(Point a){ Point b = new Point(); double x = a.longitude; double y= a.latitude; double z = Math.Sqrt(x * x + y * y) + 0.00002 * Math.Sin(y * Math.PI / 180); double theta = Math.Atan2(y, x) + 0.000003 * Math.Cos(x * Math.PI / 180); b.longitude = z * Math.Cos(theta) + 0.0065; b.latitude = z * Math.Sin(theta) + 0.006; return b; }
最后顺便贴一个求两个GPS点间距离的代码:
public static double Degree2Radian(double degree) { double radian = degree * Math.PI / 180; return radian; } //http://www.movable-type.co.uk/scripts/latlong.html public static double Distance(Point a, Point b) { double R = 6371000; double phi1 = Degree2Radian(a.latitude); double phi2 = Degree2Radian(b.latitude); double deltaPhi = Degree2Radian(a.latitude - b.latitude); double deltaLam = Degree2Radian(a.longitude - b.longitude); double aa = Math.Sin(deltaPhi / 2) * Math.Sin(deltaPhi / 2) + Math.Cos(phi1) * Math.Cos(phi2) * Math.Sin(deltaLam / 2) * Math.Sin(deltaLam / 2); double c = 2 * Math.Atan2(Math.Sqrt(aa), Math.Sqrt(1 - aa)); double d = R * c; return d; }
标签:
原文地址:http://www.cnblogs.com/sylvanas2012/p/5342530.html