标签:
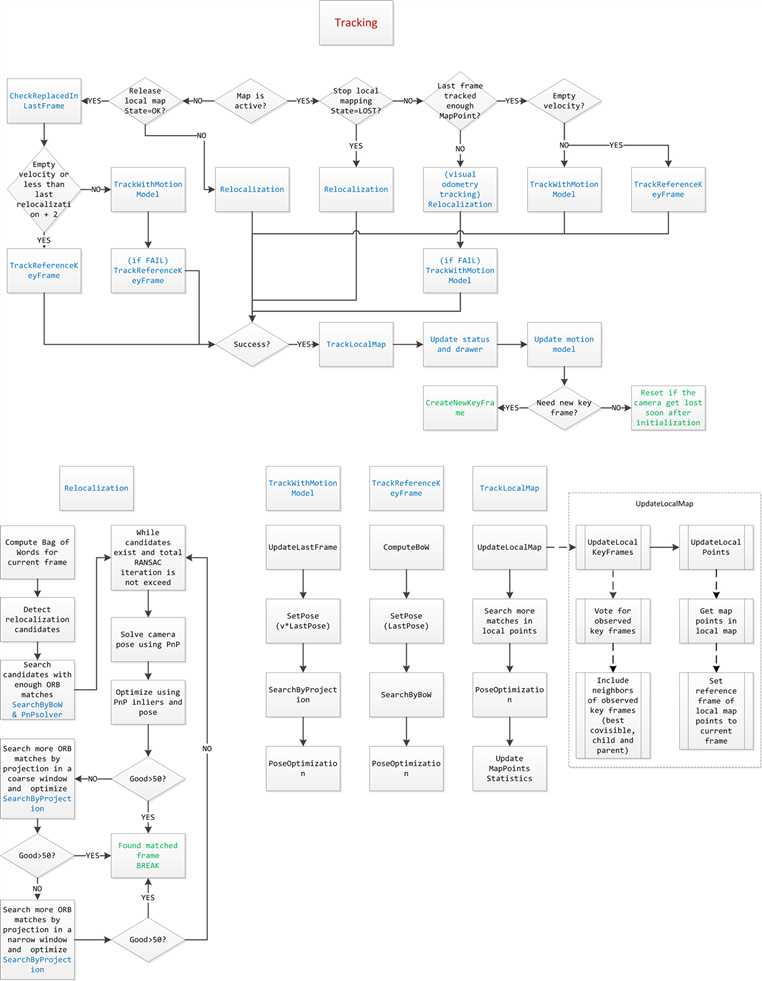
最近在读ORB-SLAM的代码,虽然代码注释算比较多了,但各种类和变量互相引用,看起来有点痛苦。索性总结了一下Tracking部分的代码结构,希望能抓住主要思路,不掉坑里。
可以看出,追踪部分的主要思路是在当前帧和(局部)地图之间寻找尽可能多的对应关系,持续优化位姿和地图。
ORB-SLAM(四)之追踪(Tracking)
原文地址:http://www.cnblogs.com/luyb/p/5357790.html