标签:
使用Processing 软件, 通过 arduino 输入 电子罗盘的数据,通过PC端进行校准,程序如下:
import processing.serial.*;
Serial myPort;
ArrayList<Float> xList = new ArrayList<Float>();
ArrayList<Float> yList = new ArrayList<Float>();
ArrayList<Float> zList = new ArrayList<Float>();
float minX,maxX;
float minY,maxY;
float minZ,maxZ;
float moX,moY;
float count;
void setup() {
size(600, 600, P3D);
myPort = new Serial(this,"COM5", 38400);
myPort.bufferUntil(10);
}
void draw() {
background(100);
float midX = (minX+maxX)/2;
float midY = (minY+maxY)/2;
float midZ = (minZ+maxZ)/2;
if (mousePressed) {
moX= mouseX;
moY= mouseY;
}
//camera(moX,moY, (height/2) / tan(PI/5), midX, midY,midZ, 0, 1, 0);
camera(moX,moY,(height/2) / tan(PI/5), width/2, height/2,0, 0, 1, 0);
translate(width/2, height/2, -100);
strokeWeight(2); // Default
stroke(255);
noFill();
//x
line(midX-100,midY,midZ,midX+100,midY,midZ);
//y
line(midX,midY+100,midZ,midX,midY-100,midZ);
//z
line(midX,midY,midZ-100,midX,midY,midZ+100);
//box(200);
for(int i = 0;i<xList.size();i++){
point(xList.get(i),yList.get(i),zList.get(i));
}
println(count);
println("midX:"+midX+","+"midY"+midY+","+"midZ:"+midZ);
}
void serialEvent (Serial myPort)
{
float mX = 0;
float mY = 0;
float mZ = 0;
String inString = myPort.readStringUntil(10);
if (inString != null)
{
inString = trim(inString);
String[] list = split(inString, ‘,‘);
if(list.length ==4){
count = float(list[0]);
mX = float(list[1])/100;
mY = float(list[2])/100;
mZ = float(list[3])/100;
//-------------------------
if(mX < minX){
minX = mX;
}
if(mX > maxX){
maxX = mX;
}
//----------------------------
if(mY < minY){
minY = mY;
}
if(mY > maxY){
maxY = mY;
}
//----------------------------
if(mZ > maxZ){
maxZ = mZ;
}
if(mZ < minZ){
minZ = mZ;
}
xList.add(mX);
yList.add(mY);
zList.add(mZ);
}
}
}
arduino 代码如下:
int mx,my,mz;
:
:
: 略
Serial.print(count);
Serial.print(",");
Serial.print(mx); //Inclination X axis (as measured by accelerometer)
Serial.print(",");
Serial.print(my); //Inclination X axis (estimated / filtered)
Serial.print(",");
Serial.print(mz); //Inclination X axis (estimated / filtered)
Serial.println("");
count++;
PC端获取的效果如下图:
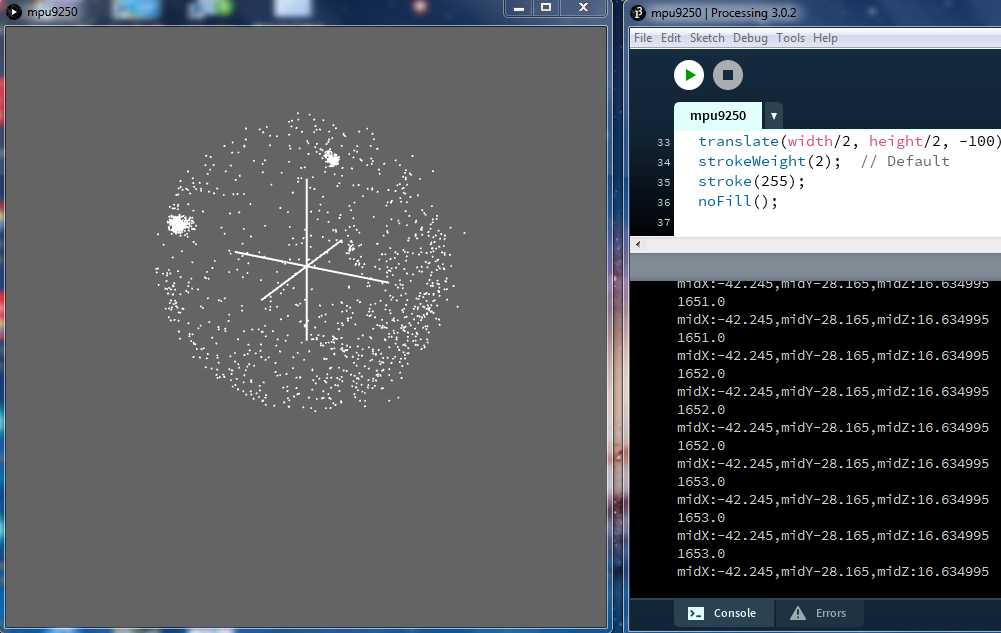
最终坐标系完全落入球内表示校准成功.
视频:
Processing 电子罗盘校准(以 MPU9250为例)
标签:
原文地址:http://www.cnblogs.com/dreamfactory/p/5402691.html