标签:
《SIFT原理与源码分析》系列文章索引:http://www.cnblogs.com/tianyalu/p/5467813.html
由前一篇《关键点搜索与定位》,我们已经找到了关键点。为了实现图像旋转不变性,需要根据检测到的关键点局部图像结构为特征点方向赋值。也就是在findScaleSpaceExtrema()函数里看到的alcOrientationHist()语句:
// 计算梯度直方图 float omax = calcOrientationHist(gauss_pyr[o*(nOctaveLayers+3) + layer], Point(c1, r1), cvRound(SIFT_ORI_RADIUS * scl_octv), SIFT_ORI_SIG_FCTR * scl_octv, hist, n);
在前文中,精确定位关键点后也找到改特征点的尺度值σ,根据这一尺度值,得到最接近这一尺度值的高斯图像:

使用有限差分,计算以关键点为中心,以3×1.5σ为半径的区域内图像梯度的幅角和幅值,公式如下:

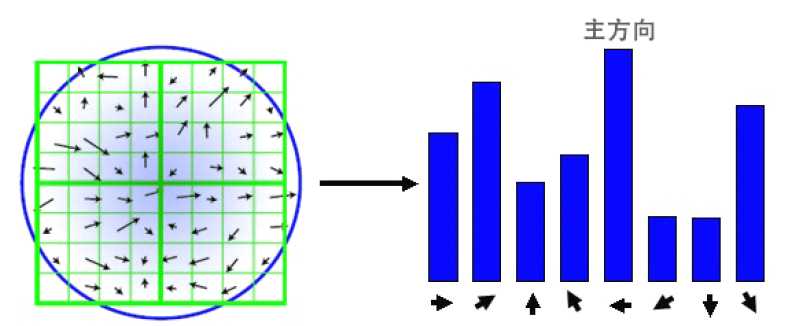
在完成关键点邻域内高斯图像梯度计算后,使用直方图统计邻域内像素对应的梯度方向和幅值。
有关直方图的基础知识可以参考《数字图像直方图》,可以看做是离散点的概率表示形式。此处方向直方图的核心是统计以关键点为原点,一定区域内的图像像素点对关键点方向生成所作的贡献。
梯度方向直方图的横轴是梯度方向角,纵轴是剃度方向角对应的梯度幅值累加值。梯度方向直方图将0°~360°的范围分为36个柱,每10°为一个柱。下图是从高斯图像上求取梯度,再由梯度得到梯度方向直方图的例图。
在计算直方图时,每个加入直方图的采样点都使用圆形高斯函数函数进行了加权处理,也就是进行高斯平滑。这主要是因为SIFT算法只考虑了尺度和旋转不变形,没有考虑仿射不变性。通过高斯平滑,可以使关键点附近的梯度幅值有较大权重,从而部分弥补没考虑仿射不变形产生的特征点不稳定。
通常离散的梯度直方图要进行插值拟合处理,以求取更精确的方向角度值。(这和《关键点搜索与定位》中插值的思路是一样的)。
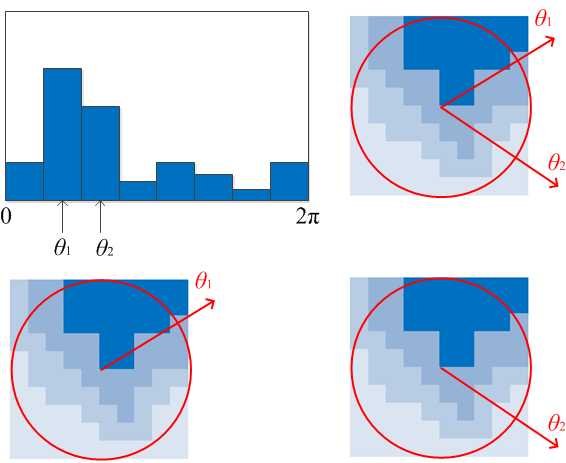
直方图峰值代表该关键点处邻域内图像梯度的主方向,也就是该关键点的主方向。在梯度方向直方图中,当存在另一个相当于主峰值 80%能量的峰值时,则将这个方向认为是该关键点的辅方向。所以一个关键点可能检测得到多个方向,这可以增强匹配的鲁棒性。Lowe的论文指出大概有15%关键点具有多方向,但这些点对匹配的稳定性至为关键。
获得图像关键点主方向后,每个关键点有三个信息(x,y,σ,θ):位置、尺度、方向。由此我们可以确定一个SIFT特征区域。通常使用一个带箭头的圆或直接使用箭头表示SIFT区域的三个值:中心表示特征点位置,半径表示关键点尺度(r=2.5σ),箭头表示主方向。具有多个方向的关键点可以复制成多份,然后将方向值分别赋给复制后的关键点。如下图:
// Computes a gradient orientation histogram at a specified pixel // 计算特定点的梯度方向直方图 static float calcOrientationHist( const Mat& img, Point pt, int radius, float sigma, float* hist, int n ) { //len:2r+1也就是以r为半径的圆(正方形)像素个数 int i, j, k, len = (radius*2+1)*(radius*2+1); float expf_scale = -1.f/(2.f * sigma * sigma); AutoBuffer<float> buf(len*4 + n+4); float *X = buf, *Y = X + len, *Mag = X, *Ori = Y + len, *W = Ori + len; float* temphist = W + len + 2; for( i = 0; i < n; i++ ) temphist[i] = 0.f; // 图像梯度直方图统计的像素范围 for( i = -radius, k = 0; i <= radius; i++ ) { int y = pt.y + i; if( y <= 0 || y >= img.rows - 1 ) continue; for( j = -radius; j <= radius; j++ ) { int x = pt.x + j; if( x <= 0 || x >= img.cols - 1 ) continue; float dx = (float)(img.at<short>(y, x+1) - img.at<short>(y, x-1)); float dy = (float)(img.at<short>(y-1, x) - img.at<short>(y+1, x)); X[k] = dx; Y[k] = dy; W[k] = (i*i + j*j)*expf_scale; k++; } } len = k; // compute gradient values, orientations and the weights over the pixel neighborhood exp(W, W, len); fastAtan2(Y, X, Ori, len, true); magnitude(X, Y, Mag, len); // 计算直方图的每个bin for( k = 0; k < len; k++ ) { int bin = cvRound((n/360.f)*Ori[k]); if( bin >= n ) bin -= n; if( bin < 0 ) bin += n; temphist[bin] += W[k]*Mag[k]; } // smooth the histogram // 高斯平滑 temphist[-1] = temphist[n-1]; temphist[-2] = temphist[n-2]; temphist[n] = temphist[0]; temphist[n+1] = temphist[1]; for( i = 0; i < n; i++ ) { hist[i] = (temphist[i-2] + temphist[i+2])*(1.f/16.f) + (temphist[i-1] + temphist[i+1])*(4.f/16.f) + temphist[i]*(6.f/16.f); } // 得到主方向 float maxval = hist[0]; for( i = 1; i < n; i++ ) maxval = std::max(maxval, hist[i]); return maxval; }
这一步比较简单~参见《SIFT原理与源码分析》。
本文转自:http://blog.csdn.net/xiaowei_cqu/article/details/8096072
标签:
原文地址:http://www.cnblogs.com/tianyalu/p/5467966.html