标签:
1 图像平滑
图像平滑,可用来对图像进行去噪 (noise reduction) 或 模糊化处理 (blurring),实际上图像平滑仍然属于图像空间滤波的一种 (低通滤波)
既然是滤波,则图像中任一点 (x, y),经过平滑滤波后的输出 g(x, y) 如下:
g(x,y)=∑s=−aa∑t=−bbw(s,t)f(x+s,y+t)g(x,y)=∑s=−aa∑t=−bbw(s,t)f(x+s,y+t)
以 3X3 的滤波器为例 (即 a=b=1),则矩阵 Mx 和 Mf 对应的元素乘积之和,就是 g(x, y)
其中,Mx=???w(−1,−1)w(0,−1)w(1,−1)w(−1,0)w(0,0)w(1,0)w(−1,1)w(1,1)w(1,1)???Mf=???f(x−1,y−1)f(x,y−1)f(x+1,y−1)f(x−1,y)f(x,y)f(x+1,y)f(x−1,y+1)f(x+1,y+1)f(x+1,y+1)???Mx=[w(−1,−1)w(−1,0)w(−1,1)w(0,−1)w(0,0)w(1,1)w(1,−1)w(1,0)w(1,1)]Mf=[f(x−1,y−1)f(x−1,y)f(x−1,y+1)f(x,y−1)f(x,y)f(x+1,y+1)f(x+1,y−1)f(x+1,y)f(x+1,y+1)]
2 OpenCV 函数
OpenCV 中主要有四个函数涉及到图像平滑,分别是盒式滤波 (box),高斯滤波 (Gaussian),中值滤波 (median),双边滤波 (bilateral)
2.1 盒式滤波
输出图像的任一像素灰度值,等于其所有邻域像素灰度值的平均值
模糊化核为,K=α?????111111............111111?????K=α[11...1111...11...11...11] 其中,α={1ksize.weidth∗ksize.height1when normalize = trueotherwiseα={1ksize.weidth∗ksize.heightwhen normalize = true1otherwise

void cv::boxFilter (
InputArray src, // 输入图像
OutputArray dst, // 输出图像
int ddepth, // 输出图像深度,-1 表示等于 src.depth()
Size ksize, // 模糊化核 (kernel) 的大小
Point anchor = Point(-1,-1), // 锚点位置,缺省值表示 anchor 位于模糊核的正中心
bool normalize = true, // 是否归一化处理
int borderType = BORDER_DEFAULT // 边界模式
)
取 ddepth = 1,normalize = true,则可以得到模糊化函数 (blur)
boxFilter( src, dst, -1, ksize, anchor, true, borderType );
模糊化函数 (blur),本质上是一个输入和输出图像深度 (ddepth) 相同,并且做归一化处理的盒式滤波器
void cv::blur (
InputArray src,
OutputArray dst,
Size ksize,
Point anchor = Point(-1,-1),
int borderType = BORDER_DEFAULT
)
2.2 中值滤波
中值滤波最为简单,常用来消除椒盐噪声
输出图像中 (x, y) 点处的像素值,等于输入图像以 (x, y) 为中心点的邻域像素 (ksize x ksize) 平均值
void cv::medianBlur (
InputArray src,
OutputArray dst,
int ksize // 滤波器孔径大小,一般为奇数且大于 1,比如 3, 5, 7, ...
)
2.3 高斯滤波
高斯滤波最为有用,它是根据当前像素和邻域像素之间,空间距离的不同,计算得出一个高斯核 (邻域像素的加权系数),
然后,高斯核从左至右、从上到下遍历输入图像,与输入图像的像素值求卷积和,得到输出图像的各个像素值
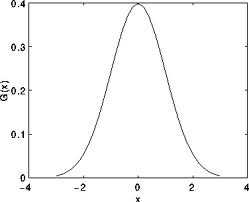
G0(x,y)=Ae−(x−μx)22σ2x+−(y−μy)22σ2yG0(x,y)=Ae−(x−μx)22σx2+−(y−μy)22σy2
无须理会公式的复杂,只需要记住一点即可:邻域像素距离当前像素越远 (saptial space),则其相应的加权系数越小
为了便于直观理解,可看下面这个一维高斯核,推而广之将 G(x) 曲线以 x=0 这条轴为中心线,旋转360度可想象其二维高斯核
void cv::GaussianBlur (
InputArray src,
OutputArray dst,
Size ksize, // 高斯核的大小
double sigmaX, // 高斯核在x方向的标准差
double sigmaY = 0, // 高斯核在y方向的标准差,缺省为 0,表示 sigmaY = sigmaX
int borderType = BORDER_DEFAULT
)
注意: 高斯核的大小 Size(width, height),w 和 h 二者不必相同但必须都是奇数,若都设为 0,则从 sigma 自动计算得出
2.4 双边滤波
上面三种方法都是低通滤波,因此在消除噪声的同时,也常会将边缘信息模糊化。双边滤波和高斯滤波类似,但是它将邻域像素的加权系数分为两部分,
第一部分与高斯滤波的完全相同,第二部分则考虑当前像素和邻域像素之间灰度值的差异,从而在消除噪声的基础上,也较好的保留了图像的边缘信息
void cv::bilateralFilter (
InputArray src,
OutputArray dst,
int d, // 像素邻域直径,若为非正值,则从 sigmaSpace 自动计算得出
double sigmaColor, // 颜色空间的标注方差
double sigmaSpace, // 坐标空间的标准方差
int borderType = BORDER_DEFAULT
)
注意 1) 双边滤波相比以上三种滤波方法,其处理速度很慢,因此,一般建议取 d=5 用于实时图像处理,d=9 适合于非实时的图像领域
注意 2) sigmaColor 和 sigmaSpace 可取相同值,一般在 10 ~ 150 之间,小于 10,则没什么效果,大于 150,则效果太强烈,看起来明显“卡通化”
3 代码示例
3.1 OpenCV
OpenCV 中的示例,通过逐渐增大像素邻域的大小 Size(w, h),将上述滤波过程动态化,非常形象的展示了邻域大小对滤波效果的影响
代码摘抄:
 View Code
View Code3.2 滤波对比
实际中,可直接调用以上四个滤波函数,代码如下:
1 #include "opencv2/imgproc/imgproc.hpp"
2 #include "opencv2/highgui/highgui.hpp"
3
4 using namespace std;
5 using namespace cv;
6
7 int main()
8 {
9 Mat src = imread("E:/smooth/bird.jpg");
10 if(src.empty()) return -1;
11
12 namedWindow("original", CV_WINDOW_AUTOSIZE);
13 namedWindow("blur", CV_WINDOW_AUTOSIZE);
14 namedWindow("GaussianBlur", CV_WINDOW_AUTOSIZE);
15 namedWindow("medianBlur", CV_WINDOW_AUTOSIZE);
16 namedWindow("bilateralFilter", CV_WINDOW_AUTOSIZE);
17
18 imshow("original", src);
19
20 Mat dst;
21
22 blur(src, dst, Size(3,3));
23 imshow("blur", dst);
24
25 medianBlur(src,dst,3);
26 imshow("medianBlur",dst);
27
28 GaussianBlur(src,dst,Size(3,3),0);
29 imshow("GaussianBlur",dst);
30
31 bilateralFilter(src,dst,9,50,50);
32 imshow("bilateralFilter",dst);
33
34 waitKey(0);
35 return 0;
36 }
四种滤波方法的效果图,如下所示:

参考资料
<Digital Image Processing_3rd> chapter 3
<Learning OpenCV_2nd>
<OpenCV Tutorials> imgproc module - Smoothing Images
标签:
原文地址:http://www.cnblogs.com/destim/p/5472401.html