标签:
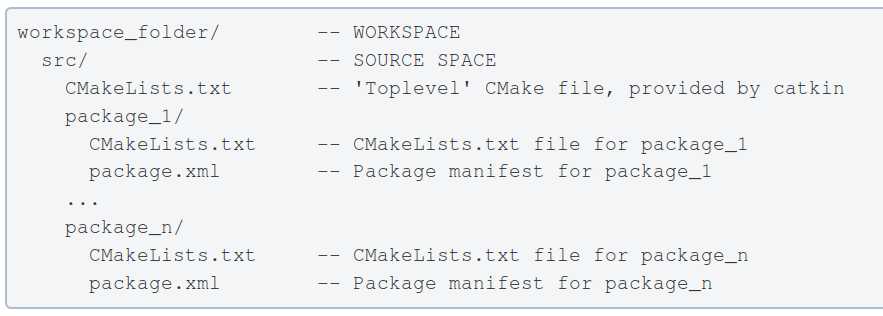
my_package/
CMakeLists.txt
package.xml
source /opt/ros/indigo/setup.bash //一般在.bashrc文件已经做过
★ Let‘s create a catkin workspace:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace //很关键
$ cd ~/catkin_ws/ //注意catkin_make的地方 $ catkin_make
★ 注意思考此时catkin空间的文件夹都有什么???
$ source devel/setup.bash
$ echo $ROS_PACKAGE_PATH
/home/youruser/catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks
# catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
cd ~/catkin_ws/src catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
$ . ~/catkin_ws/devel/setup.bash
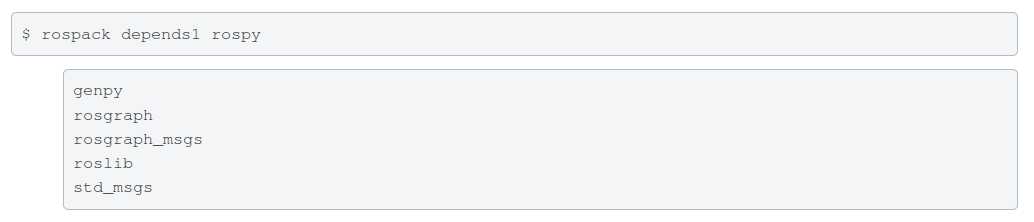
$ rospack depends1 beginner_tutorials
std_msgs
rospy
roscpp
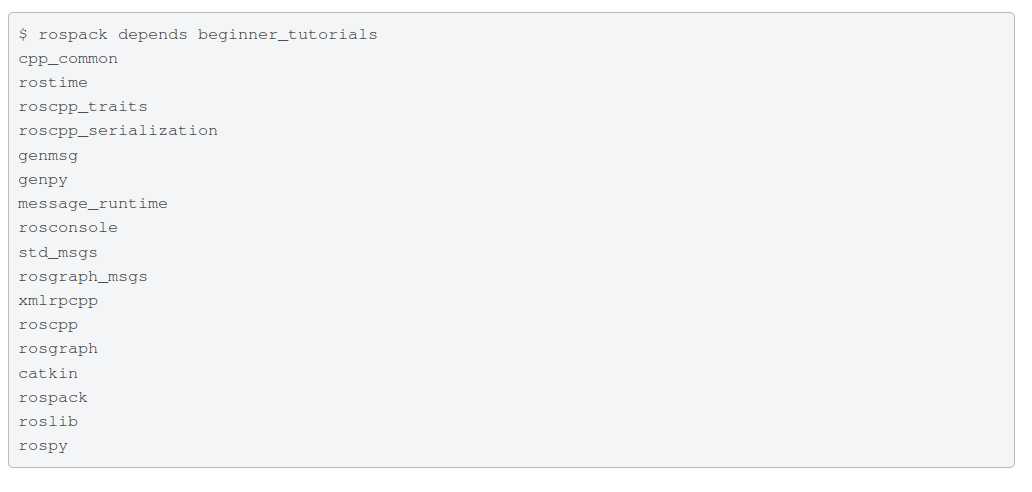
实际上, A package can have quite a few indirect dependencies.
标签:
原文地址:http://www.cnblogs.com/jack-wangchong/p/5473455.html