标签:
表面瑕疵检测是机器视觉领域非常重要的一个应用。机器视觉是集光学、机电和计算机三个领域的一门不算新的技术。但目前表面瑕疵检测在学界主要是计算机专业或者控制专业瞄准图像处理方向在做,而视觉光学系统这一块主要是光学工程专业在做。很少有研究者把这三块都结合的很好,而国内做这机器视觉(注意是机器视觉 不是计算机视觉)基本上都是小公司。
软件这一块就不说了,国内的整体软件环境不好。据我所知,日本、德国和美国在机器视觉方面有很多相对成熟的软件。中国农业大学的陈兵旗教授在留日期间弄过很多机器视觉方面的农业机器人,同时他也写过一本书介绍视觉图像处理,后面还附录了他们自己主推的软件。德国的软件就是下面要介绍的halcon。提到halcon就有必要和开源的opencv进行对比,opencv在图像处理方面也是小有名气,但是其成型的图像模块函数并不多,而且由于是开源,并没有专门对各种图像处理领域方面的检测需求进行扩展,还是那句话,毕竟是开源。
halcon是商业软件,国内主要是大恒公司在代理,其在图像处理方面,特别是检测测量方面有很多优势。下面我以一个例子在介绍halcon图像算法开发过程。
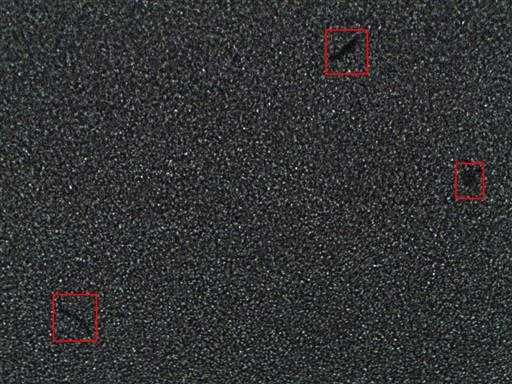
启动软件,ctrl+E弹出例程,选择表面检测中的detect_mura_defects_texture 。这个是液晶面板上的mura 损伤 。附录上张存在损伤的图像 
在杂乱的纹理上出现的黑色区域就是损伤。如何检测呢?
代码如下:
* this example shows how to detect mura defects
* in highly textured images
*
dev_close_window ()
dev_update_off ()
Path := ‘lcd/mura_defects_texture_‘
read_image (Image, Path+‘01‘)
get_image_size (Image, Width, Height)
dev_open_window (0, 0, 640, 480, ‘black‘, WindowHandle)
set_display_font (WindowHandle, 14, ‘courier‘, ‘true‘, ‘false‘)
dev_set_draw (‘margin‘)
dev_set_line_width (3)
dev_set_color (‘red‘)
for f := 1 to 2 by 1
read_image (Image, Path+f$‘.2i‘)
decompose3 (Image, R, G, B)
* defects are characterized by dark patches. Hence, by substracting the
* estimated background illumination from the original image the
* defects become more apparent
estimate_background_illumination (B, ImageFFT1)
sub_image (B, ImageFFT1, ImageSub, 2, 100)
* median filter smooths out the fine texture, simplifying the following
* segmentation and final detection of defects
median_image (ImageSub, ImageMedian, ‘circle‘, 9, ‘mirrored‘)
watersheds_threshold (ImageMedian, Basins, 20)
* dark patches corresponding to defects have a very low energy
cooc_feature_image (Basins, ImageMedian, 6, 0, Energy, Correlation, Homogeneity, Contrast)
tuple_find (sgn(Energy-0.05), -1, Indices)
select_obj (Basins, Defects, Indices+1)
*
dev_display (Image)
dev_display (Defects)
count_obj (Defects, NDefects)
disp_message (WindowHandle, NDefects+‘ \‘mura\‘ defects detected‘, ‘window‘, -1, -1, ‘red‘, ‘true‘)
if (f < 2)
disp_continue_message (WindowHandle, ‘black‘, ‘true‘)
stop ()
endif
endfor
1对彩色图像进行R G B分解,选取B作为后续图像。这个原因是通过实验处理的,在B图像下黑色斑和背景差异最大吧。
2 生成背景模板,将图像傅里叶变换到频域中,通过高斯滤波,然后傅里叶反变换回来,得到的图像就是背景模板
3 背景差分。采用以下函数,增强两幅图像的差异
sub_image ( ImageMinuend, ImageSubtrahend : ImageSub : Mult, Add : )
ImageSub=(ImageMinuend-ImageSubtrahend)*Mult+Add
4 分水岭算法分割,在分割之前采用中值滤波来抑制小斑点或细线。分水岭后,图像分割为多个轮廓(region)。
5 计算多个轮廓region的灰度信息,包括能量。相关度、同一度、对比度,通过灰度共生矩阵。 前面的两个参数是灰度级和方向,灰度级是2^,方向即灰度共生矩阵方向。
6 根据能量信息对多个region进行筛选,筛选后的region就是检测结果。
Halcon::tuple_find ((Energy-0.05).Sgn(), -1, &Indices);
image_opencv_test=m_ip->HImageToIplImage(m_hoImage);
int number=Indices.Num();
for (int i=0;i<number;i++)
{
Halcon::HTuple new_Indices;
new_Indices[0]=Indices[i].I()+1;
Halcon::select_obj (Basins, &Defects, new_Indices);
Hlong x1,x2,y1,y2;
Halcon::smallest_rectangle1(Defects,&y1,&x1,&y2,&x2);
cvRectangle(image_opencv_test,cvPoint(x1,y1),cvPoint(x2,y2),cvScalar(0,0,255),2,8,0);
}
判断能量是否大于0.05,通过sgn函数将大于0.05的置1,小于的置-1。通过find
在(Energy-0.05).Sgn()中寻找-1出现的位置,注意这个位置是从0开始的。貌似这个是经过人为排序的,所以indices 中就是前三个 0 1 2
select_obj (Basins, &Defects, new_Indices);是从Basins提取序号为new_Indices的region 。为什么重新定义一个HTuple 因为HTuple实际上是个数组。find后得到的就是一个indices 数组,里面存在三个数。
select_obj 的参数必须是HTuple,也就是数组,所以只能重新定义,而且序号从1开始,因此要加1,只能获取数组中的值加1,
获取的代码为new_Indices[0]=Indices[i].I()+1; 也就是说数组中的值可以直接访问,然后转化为需要的类型。
这是我弄的比较笨的方法,直接通过halcon转化c++代码,只有一句。我觉得还是单个取出来比较靠谱。
贴一个检测结果吧:
标签:
原文地址:http://www.cnblogs.com/love6tao/p/5479775.html