标签:
1、设备控制理论
a、作用
大部分驱动程序除了需要提供读写设备的能力外,还需要具备控制设备的能力,比如:改变串口波特率。
b、设备控制--应用函数
在用户空间,使用ioctl系统调用来控制设备,其原型如下:int ioctl(int fd,unsigned long cmd,...),fd:要控制的设备文件描述符。cmd:发送给设备的控制命令。...:第三个参数是可选的参数,存在与否是依赖于控制命令。
设备控制---驱动函数
当应用程序使用ioctl系统调用时,驱动程序将由如下函数来响应
1、2.6.26之前的内核
long (*ioctl)(struct inode* node,struct file *filp,unsigned int cmd,unsigned long arg)
2、2.6.36之后的内核
long (*unlocked ioctl)(struct file *filp,unsigned int cmd,unsigned long arg)
参数cmd:通过应用函数ioctl传递下来的命令。
设备控制实现
控制实现---定义命令
命令从其实质而言就是一个整数,但为了让这个整数具备更好的可读性,我们通常会把这个整数分为几个段;类型(8位),序号,参数传送方向,参数长度。
type(类型/幻数):表明这是属于哪个设备的命令。
number(序号):用来区分同一设备的不同命令
Direction:参数传送的方向,可能的值是_IOC_NONE(没有数据传输)、_IOC_READ、_IOC_WRITE(向设备写入参数)
size:参数长度。
Linux系统提供了下面的宏来帮助定义命令:
_IO(type,nr):不带参数的命令。
_IOR(type,nr,datatype):从设备中读参数的命令。
_IOW(type,nr,datatype):向设备写入参数的命令。
eg:#define MEM_MAGIC ‘m‘ //定义幻数
#define MEM_SET _IOW(MEME_MAGIC,0,int)
实现操作:
unlocked_ioctl函数的实现通常是根据命令执行的一个switch语句,但是,当命令号不能匹配一个设备所支持的命令时,返回-EINVAL。
编程模型:
switch cmd
case 命令A
//执行A对应的操作
case 命令B
//执行B对应的操作
default:
//return -EINVAL
功能是重启设备、对设备设置参数
把之前的Makefile以及memdev.c文件拷贝到新目录,然后在新目录下创建touch memdev.h,chmod 777 memdev.h,vi memdev.h,在里面定义命令如下:
#define MEM_MAGIC ‘m‘
#define MEM_RESTART _IO(MEM_MAGIC,0)
#define MEM_SET _IOW(MEM_MAGIC,1,int)
下面来实现这些驱动程序vi memdev.c,在文件操作结构体里最下面加入.unlock_ioctl=mem_ioctl,‘
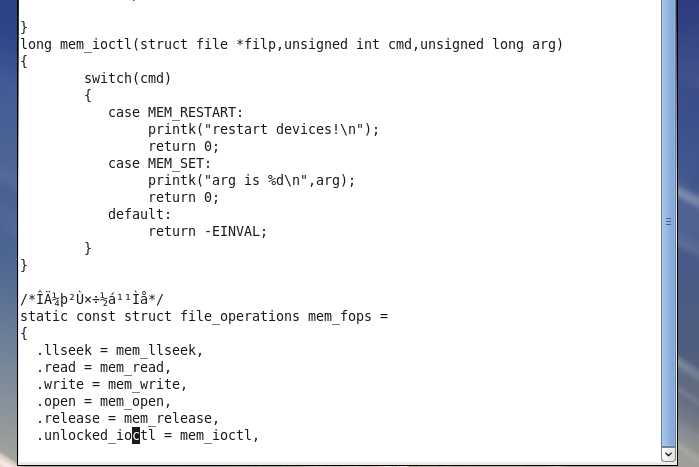
下面定义函数mem_ioctl,其原型为
long (*unlocked_ioctl)(struct file *,unsigned int ,unsigned long)
在代码中实现它
下面编写应用程序来控制
touch mem_ctl.c,chmod 777 mem_ctl.c
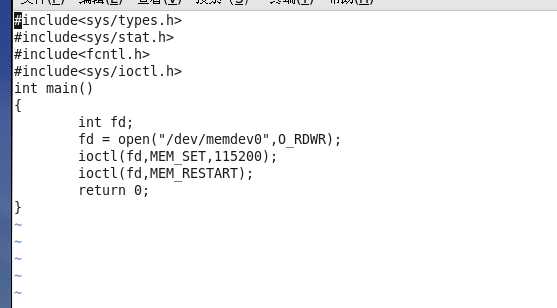
静态编译arm-linux-gcc -static mem_ctl.c -o mem_ctl
把驱动程序和应用程序memdev.ko和mem_ctl拷贝到开发板下。
下面安装驱动程序insmod memdev.ko ->查看它分配到的主设备号,cat /proc/devices,创建设备文件,mkno /dev/memdev0 c 253 0,运行应用程序./mem_ctl。
标签:
原文地址:http://www.cnblogs.com/gary-guo/p/5538733.html