标签:
1:概述
线段树,类似区间树,是一个完全二叉树,它在各个节点保存一条线段(数组中的一段子数组),主要用于高效解决连续区间的动态查询问题,由于二叉结构的特性,它基本能保持每个操作的复杂度为O(lgN)!
性质:父亲的区间是[a,b],(c=(a+b)/2)左儿子的区间是[a,c],右儿子的区间是[c+1,b],线段树需要的空间为数组大小的四倍
2:基本操作(demo用的是查询区间最小值)
线段树的主要操作有:
(1):线段树的构造 void build(int node, int begin, int end);
主要思想是递归构造,如果当前节点记录的区间只有一个值,则直接赋值,否则递归构造左右子树,最后回溯的时候给当前节点赋值
#include <iostream> using namespace std; const int maxind = 256; int segTree[maxind * 4 + 10]; int array[maxind]; /* 构造函数,得到线段树 */ void build(int node, int begin, int end) { if (begin == end) segTree[node] = array[begin]; /* 只有一个元素,节点记录该单元素 */ else { /* 递归构造左右子树 */ build(2*node, begin, (begin+end)/2); build(2*node+1, (begin+end)/2+1, end); /* 回溯时得到当前node节点的线段信息 */ if (segTree[2 * node] <= segTree[2 * node + 1]) segTree[node] = segTree[2 * node]; else segTree[node] = segTree[2 * node + 1]; } } int main() { array[0] = 1, array[1] = 2,array[2] = 2, array[3] = 4, array[4] = 1, array[5] = 3; build(1, 0, 5); for(int i = 1; i<=20; ++i) cout<< "seg"<< i << "=" <<segTree[i] <<endl; return 0; }
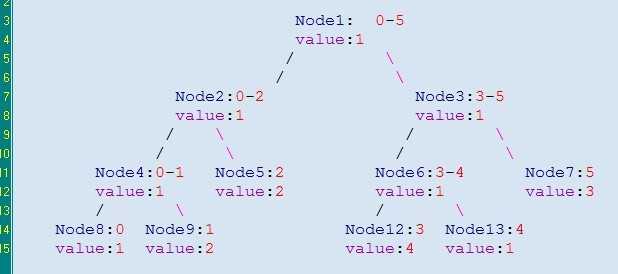 此build构造成的树如图
此build构造成的树如图
(2):区间查询int query(int node, int begin, int end, int left, int right);
(其中node为当前查询节点,begin,end为当前节点存储的区间,left,right为此次query所要查询的区间)
主要思想是把所要查询的区间[a,b]划分为线段树上的节点,然后将这些节点代表的区间合并起来得到所需信息
比如前面一个图中所示的树,如果询问区间是[0,2],或者询问的区间是[3,3],不难直接找到对应的节点回答这一问题。但并不是所有的提问都这么容易
int query(int node, int begin, int end, int left, int right) { int p1, p2; /* 查询区间和要求的区间没有交集 */ if (left > end || right < begin) return -1; /* if the current interval is included in */ /* the query interval return segTree[node] */ if (begin >= left && end <= right) return segTree[node]; /* compute the minimum position in the */ /* left and right part of the interval */ p1 = query(2 * node, begin, (begin + end) / 2, left, right); p2 = query(2 * node + 1, (begin + end) / 2 + 1, end, left, right); /* return the expect value */ if (p1 == -1) return p2; if (p2 == -1) return p1; if (p1 <= p2) return p1; return p2; }
可见,这样的过程一定选出了尽量少的区间,它们相连后正好涵盖了整个[left,right],没有重复也没有遗漏。同时,考虑到线段树上每层的节点最多会被选取2个,一共选取的节点数也是O(log n)的,因此查询的时间复杂度也是O(log n)。
线段树并不适合所有区间查询情况,它的使用条件是“相邻的区间的信息可以被合并成两个区间的并区间的信息”。即问题是可以被分解解决的。
(3):区间或节点的更新 及 线段树的动态维护update (这是线段树核心价值所在,节点中的标记域可以解决N多种问题)
动态维护需要用到标记域,延迟标记等。
a:单节点更新
void Updata(int node, int begin, int end, int ind, int add)/*单节点更新*/ { if( begin == end ) { segTree[node] += add; return ; } int m = ( left + right ) >> 1; if(ind <= m) Updata(node * 2,left, m, ind, add); else Updata(node * 2 + 1, m + 1, right, ind, add); /*回溯更新父节点*/ segTree[node] = min(segTree[node * 2], segTree[node * 2 + 1]); }
b:区间更新(线段树中最有用的)
需要用到延迟标记,每个结点新增加一个标记,记录这个结点是否被进行了某种修改操作(这种修改操作会影响其子结点)。对于任意区间的修改,我们先按照查询的方式将其划分成线段树中的结点,然后修改这些结点的信息,并给这些结点标上代表这种修改操作的标记。在修改和查询的时候,如果我们到了一个结点p,并且决定考虑其子结点,那么我们就要看看结点p有没有标记,如果有,就要按照标记修改其子结点的信息,并且给子结点都标上相同的标记,同时消掉p的标记。(优点在于,不用将区间内的所有值都暴力更新,大大提高效率,因此区间更新是最优用的操作)
void Change(node *p, int a, int b) /* 当前考察结点为p,修改区间为(a,b]*/ { if (a <= p->Left && p->Right <= b) /* 如果当前结点的区间包含在修改区间内*/ { ...... /* 修改当前结点的信息,并标上标记*/ return; } Push_Down(p); /* 把当前结点的标记向下传递*/ int mid = (p->Left + p->Right) / 2; /* 计算左右子结点的分隔点 if (a < mid) Change(p->Lch, a, b); /* 和左孩子有交集,考察左子结点*/ if (b > mid) Change(p->Rch, a, b); /* 和右孩子有交集,考察右子结点*/ Update(p); /* 维护当前结点的信息(因为其子结点的信息可能有更改)*/ }
3:主要应用
(1):区间最值查询问题 (见模板1)
(2):连续区间修改或者单节点更新的动态查询问题 (见模板2)
(3):多维空间的动态查询 (见模板3)
模板1:
RMQ,查询区间最值下标---min
#include<iostream> using namespace std; #define MAXN 100 #define MAXIND 256 //线段树节点个数 //构建线段树,目的:得到M数组. void build(int node, int b, int e, int M[], int A[]) { if (b == e) M[node] = b; //只有一个元素,只有一个下标 else { build(2 * node, b, (b + e) / 2, M, A); build(2 * node + 1, (b + e) / 2 + 1, e, M, A); if (A[M[2 * node]] <= A[M[2 * node + 1]]) M[node] = M[2 * node]; else M[node] = M[2 * node + 1]; } } //找出区间 [i, j] 上的最小值的索引 int query(int node, int b, int e, int M[], int A[], int i, int j) { int p1, p2; //查询区间和要求的区间没有交集 if (i > e || j < b) return -1; if (b >= i && e <= j) return M[node]; p1 = query(2 * node, b, (b + e) / 2, M, A, i, j); p2 = query(2 * node + 1, (b + e) / 2 + 1, e, M, A, i, j); //return the position where the overall //minimum is if (p1 == -1) return M[node] = p2; if (p2 == -1) return M[node] = p1; if (A[p1] <= A[p2]) return M[node] = p1; return M[node] = p2; } int main() { int M[MAXIND]; //下标1起才有意义,否则不是二叉树,保存下标编号节点对应区间最小值的下标. memset(M,-1,sizeof(M)); int a[]={3,4,5,7,2,1,0,3,4,5}; build(1, 0, sizeof(a)/sizeof(a[0])-1, M, a); cout<<query(1, 0, sizeof(a)/sizeof(a[0])-1, M, a, 0, 5)<<endl; return 0; }
模板2:
连续区间修改或者单节点更新的动态查询问题 (此模板查询区间和)
#include <cstdio> #include <algorithm> using namespace std; #define lson l , m , rt << 1 #define rson m + 1 , r , rt << 1 | 1 #define root 1 , N , 1 #define LL long long const int maxn = 111111; LL add[maxn<<2]; LL sum[maxn<<2]; void PushUp(int rt) { sum[rt] = sum[rt<<1] + sum[rt<<1|1]; } void PushDown(int rt,int m) { if (add[rt]) { add[rt<<1] += add[rt]; add[rt<<1|1] += add[rt]; sum[rt<<1] += add[rt] * (m - (m >> 1)); sum[rt<<1|1] += add[rt] * (m >> 1); add[rt] = 0; } } void build(int l,int r,int rt) { add[rt] = 0; if (l == r) { scanf("%lld",&sum[rt]); return ; } int m = (l + r) >> 1; build(lson); build(rson); PushUp(rt); } void update(int L,int R,int c,int l,int r,int rt) { if (L <= l && r <= R) { add[rt] += c; sum[rt] += (LL)c * (r - l + 1); return ; } PushDown(rt , r - l + 1); int m = (l + r) >> 1; if (L <= m) update(L , R , c , lson); if (m < R) update(L , R , c , rson); PushUp(rt); } LL query(int L,int R,int l,int r,int rt) { if (L <= l && r <= R) { return sum[rt]; } PushDown(rt , r - l + 1); int m = (l + r) >> 1; LL ret = 0; if (L <= m) ret += query(L , R , lson); if (m < R) ret += query(L , R , rson); return ret; } int main() { int N , Q; scanf("%d%d",&N,&Q); build(root); while (Q --) { char op[2]; int a , b , c; scanf("%s",op); if (op[0] == ‘Q‘) { scanf("%d%d",&a,&b); printf("%lld\n",query(a , b ,root)); } else { scanf("%d%d%d",&a,&b,&c); update(a , b , c , root); } } return 0; }
模板3:
多维空间的动态查询
转载于http://blog.csdn.net/metalseed/article/details/8039326
标签:
原文地址:http://www.cnblogs.com/WDKER/p/5550565.html