标签:
上一篇 <OpenCV 之 图像平滑> 中,提到的图像平滑,从信号处理的角度来看,实际上是一种低通滤波器。
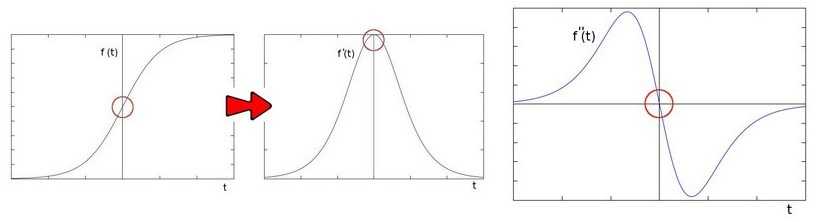
本篇中,数字图像的边缘,因为通常都是像素值变化剧烈的区域 (“高频”),故可将边缘检测视为“高通滤波”
OpenCV 中,边缘检测常用的是索贝尔算子 (Sobel) 和拉普拉斯算子 (Laplace),分别是对图像求一阶导和二阶导
1 索贝尔算子 (Sobel)
1.1 计算过程
假定输入图像矩阵为 I,卷积核大小为 3x3,则水平一阶导数 Gx 和垂直一阶导数 Gy 分别为:
$\quad G_x = \begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \\ \end{bmatrix} * I \qquad G_y = \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \\ \end{bmatrix} * I $
输出的图像矩阵 G 为
$\quad G = \sqrt{G_{x}^2 + G_{y}^2 } \qquad \text{或简化为} \qquad G = |G_x| + |G_y| $
OpenCV 中,Sobel 函数如下
void cv::Sobel ( InputArray src, // 输入图像 OutputArray dst, // 输出图像 int ddepth, // 输出图像深度,-1 表示等于 src.depth() int dx, // 水平方向的阶数 int dy, // 垂直方向的阶数 int ksize = 3, // 卷积核的大小,常取 1, 3, 5, 7 等奇数 double scale = 1, // 缩放因子,应用于计算结果 double delta = 0, // 增量数值,应用于计算结果
int borderType = BORDER_DEFAULT // 边界模式
)
dx 和 dy 表示阶数,一般取 0 或 1,但不超过 2;scale = 1,表示计算结果不缩放;delat = 0,表示计算结果无增量
1.2 Scharr 卷积核
当卷积核大小为 3x3 时,使用 sobel 卷积核来计算并不是很精确,此时常用 Scharr 卷积核来代替,如下
$\quad K_x = \begin{bmatrix} -3 & 0 & 3 \\ -10 & 0 & 10 \\ -3 & 0 & 3 \\ \end{bmatrix}\qquad K_y = \begin{bmatrix} -3 & -10 & -3 \\ 0 & 0 & 0 \\ 3 & 10 & 3 \\ \end{bmatrix} $
而 Sharr 函数,本质上就是令 ksize = 3 且使用 Scharr 卷积核的 Sobel 函数
void cv::Scharr ( InputArray src, OutputArray dst, int ddepth, int dx, int dy, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT )
不知是不是版本原因,对于 Scharr 函数,要求 dx 和 dy 都 >= 0 且 dx + dy == 1,假如 dx 和 dy 都设为 1,则会抛出异常
因此,对于 Sobel 和 Scharr 函数,通常各自求其 x 和 y 方向的导数,然后通过加权来进行边缘检测
// Gradient X Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_x, abs_grad_x ); // Gradient Y Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_y, abs_grad_y ); // Total Gradient (approximate) addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad );
2 拉普拉斯算子 (Laplace)
索贝尔算子 (Sobel) 和拉普拉斯算子 (Laplace) 都是用来对图像进行边缘检测的,不同之处在于,前者是求一阶导,后者是求二阶导
$\quad Laplace(f) = \frac{\partial^2f}{\partial x^2} + \frac{\partial^2f}{\partial y^2} = f(x+1, y) + f(x-1, y) + f(x, y+1) + f(x, y-1) - 4f(x, y)$
OpenCV 中对应的函数为 Laplacian
void cv::Laplacian ( InputArray src, OutputArray dst, int ddepth, int ksize = 1, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT )
3 Canny 算子
3.1 算法步骤
Canny 边缘检测算子,其算法步骤大体如下:
1) 用高斯滤波器对输入图像做平滑处理 (大小为 5x5 的高斯核)
$\quad K = \frac{1}{159} \begin{bmatrix} 2 & 4 & 5 & 4 & 2 \\ 4 & 9 & 12 & 9 & 4 \\ 5 & 12 & 15 & 12 & 5 \\ 4 & 9 & 12 & 9 & 4 \\ 2 & 4 & 5 & 4 & 2 \end{bmatrix}$
2) 计算图像的梯度强度和角度方向 ( x 和 y 方向上的卷积核)
$\quad K_x = \begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \\ \end{bmatrix} \qquad K_y = \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \\ \end{bmatrix} $
$\quad G = \sqrt{G_{x}^2 + G_{y}^2 } \qquad \theta = \arctan(\dfrac{ G_y }{ G_x }) $
角度方向近似为四个可能值,即 0, 45, 90, 135
3) 对图像的梯度强度进行非极大抑制
可看做边缘细化:只有候选边缘点被保留,其余的点被移除
4) 利用双阈值检测和连接边缘
若候选边缘点大于上阈值,则被保留;小于下阈值,则被舍弃;处于二者之间,须视其所连接的像素点,大于上阈值则被保留,反之舍弃
3.2 Canny 函数
OpenCV 中的 Canny 函数如下所示:
void cv::Canny ( InputArray image, // 8-bit 输入图像 OutputArray edges, // 单通道 8-bit 输出图像 double threshold1, // 下阈值 double threshold2, // 上阈值 int apertureSize = 3, bool L2gradient = false )
一般 上阈值 / 下阈值 = 2 ~ 3
L2gradient 默认 flase,表示图像梯度强度的计算采用近似形式;若为 true,则表示采用更精确的形式
4 代码示例
4.1 OpenCV 示例
Sobel 或 Scharr 示例中,使用 addWeighted 函数,来加权合成 x 和 y 方向上各自的一阶导数

#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/highgui/highgui.hpp" #include <stdlib.h> #include <stdio.h> using namespace cv; int main( int, char** argv ) { Mat src, src_gray; Mat grad; const char* window_name = "Sobel Demo - Simple Edge Detector"; int scale = 1; int delta = 0; int ddepth = CV_16S; /// Load an image src = imread( argv[1] ); if( src.empty() ) { return -1; } GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT ); /// Convert it to gray cvtColor( src, src_gray, COLOR_RGB2GRAY ); /// Create window namedWindow( window_name, WINDOW_AUTOSIZE ); /// Generate grad_x and grad_y Mat grad_x, grad_y; Mat abs_grad_x, abs_grad_y; /// Gradient X //Scharr( src_gray, grad_x, ddepth, 1, 0, scale, delta, BORDER_DEFAULT ); Sobel( src_gray, grad_x, ddepth, 1, 0, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_x, abs_grad_x ); /// Gradient Y //Scharr( src_gray, grad_y, ddepth, 0, 1, scale, delta, BORDER_DEFAULT ); Sobel( src_gray, grad_y, ddepth, 0, 1, 3, scale, delta, BORDER_DEFAULT ); convertScaleAbs( grad_y, abs_grad_y ); /// Total Gradient (approximate) addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, grad ); imshow( window_name, grad ); waitKey(0); return 0; }
Laplacion 示例中,利用了高斯滤波函数来降低噪声
1 #include "opencv2/imgproc/imgproc.hpp" 2 #include "opencv2/imgcodecs.hpp" 3 #include "opencv2/highgui/highgui.hpp" 4 #include <stdlib.h> 5 #include <stdio.h> 6 7 using namespace cv; 8 9 int main( int, char** argv ) 10 { 11 12 Mat src, src_gray, dst; 13 int kernel_size = 3; 14 int scale = 1; 15 int delta = 0; 16 int ddepth = CV_16S; 17 const char* window_name = "Laplace Demo"; 18 19 /// Load an image 20 src = imread( argv[1] ); 21 22 if( src.empty() ) 23 { return -1; } 24 25 /// Remove noise by blurring with a Gaussian filter 26 GaussianBlur( src, src, Size(3,3), 0, 0, BORDER_DEFAULT ); 27 28 /// Convert the image to grayscale 29 cvtColor( src, src_gray, COLOR_RGB2GRAY ); 30 31 /// Create window 32 namedWindow( window_name, WINDOW_AUTOSIZE ); 33 34 /// Apply Laplace function 35 Mat abs_dst; 36 37 Laplacian( src_gray, dst, ddepth, kernel_size, scale, delta, BORDER_DEFAULT ); 38 convertScaleAbs( dst, abs_dst ); 39 40 /// Show what you got 41 imshow( window_name, abs_dst ); 42 43 waitKey(0); 44 45 return 0; 46 }
在 Canny 函数之前,也需要 blur 函数,来进行降噪处理
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/imgcodecs.hpp" #include "opencv2/highgui/highgui.hpp" #include <stdlib.h> #include <stdio.h> using namespace cv; /// Global variables Mat src, src_gray; Mat dst, detected_edges; int edgeThresh = 1; int lowThreshold; int const max_lowThreshold = 100; int ratio = 3; int kernel_size = 3; const char* window_name = "Edge Map"; /** * @function CannyThreshold * @brief Trackbar callback - Canny thresholds input with a ratio 1:3 */ static void CannyThreshold(int, void*) { /// Reduce noise with a kernel 3x3 blur( src_gray, detected_edges, Size(3,3) ); /// Canny detector Canny( detected_edges, detected_edges, lowThreshold, lowThreshold*ratio, kernel_size ); /// Using Canny‘s output as a mask, we display our result dst = Scalar::all(0); src.copyTo( dst, detected_edges); imshow( window_name, dst ); } int main( int, char** argv ) { /// Load an image src = imread( argv[1] ); if( src.empty() ) { return -1; } /// Create a matrix of the same type and size as src (for dst) dst.create( src.size(), src.type() ); /// Convert the image to grayscale cvtColor( src, src_gray, COLOR_BGR2GRAY ); /// Create a window namedWindow( window_name, WINDOW_AUTOSIZE ); /// Create a Trackbar for user to enter threshold createTrackbar( "Min Threshold:", window_name, &lowThreshold, max_lowThreshold, CannyThreshold ); /// Show the image CannyThreshold(0, 0); /// Wait until user exit program by pressing a key waitKey(0); return 0; }
4.2 简单对比
在进行 Sobel,Laplacian 和 Canny 边缘检测之前,统一调用 GaussianBlur 来降低图像噪声
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" using namespace std; using namespace cv; int main() { Mat src, src_gray, dst; src = imread("E:/Edge/bird.jpg"); if(src.empty()) return -1;
namedWindow("Original", CV_WINDOW_AUTOSIZE); namedWindow("Sobel", CV_WINDOW_AUTOSIZE); namedWindow("Laplace", CV_WINDOW_AUTOSIZE); namedWindow("Canny", CV_WINDOW_AUTOSIZE); imshow("Original", src); Mat grad_x, grad_y, abs_grad_x, abs_grad_y; GaussianBlur(src, src, Size(3,3),0); cvtColor(src,src_gray,COLOR_BGR2GRAY); Sobel(src_gray, grad_x,CV_16S,0,1); // use CV_16S to avoid overflow convertScaleAbs( grad_x, abs_grad_x ); Sobel(src_gray, grad_y,CV_16S,1,0); // use CV_16S to avoid overflow convertScaleAbs( grad_y, abs_grad_y ); addWeighted( abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst ); imshow("Sobel", dst); imwrite("Sobel.jpg",dst); Laplacian(src_gray,dst,-1,3); imshow("Laplace", dst); imwrite("Laplace.jpg",dst); Canny(src_gray,dst,100,300); imshow("Canny",dst); imwrite("Canny.jpg",dst); waitKey(0); return 0; }
三种边缘检测的效果图如下:

参考资料
<Learning OpenCV_2nd>
<OpenCV Tutorials> imgproc module
标签:
原文地址:http://www.cnblogs.com/xinxue/p/5348743.html
